Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
-<br />
<br />
C<br />
<br />
<br />
<br />
+<br />
-<br />
БЕЗОПАСНОСТЬ: ЧЕЛОВЕК, АВТОМОБИЛЬ, ДОРОГА<br />
<br />
+<br />
<br />
<br />
<br />
Рис. 9 P ( ) <br />
недостаточной поворачиваемостью. Если<br />
при этом кинематика подвески заднего<br />
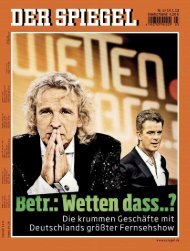
Рис. 10<br />
рота, развалах колес и плечах обкатки колеса устанавливается с большим отри-<br />
обратные соотношения тормозных сил цательным изменением поперечного на-<br />
на передних и задних колесах – 3:7, поклона оси поворота колеса или угла Δ(δ+γ),<br />
этому для оптимизации управляемо- то может достигаться стабильная хараксти<br />
автомобиля требуется регулироватеристика ее функционирования.<br />
ние в противоположном направлении. Яркой и характерной реализацией<br />
При торможении и отрицательном по- рассматриваемого способа стабилизаперечном<br />
наклоне оси поворота, развации легкового автомобиля с традициле<br />
колес с задней поверхности на них онным приводом является устройство<br />
действуют (рис. 2) восстанавливающие управления, патентуемое японской фир-<br />
моменты М сил, стабилизирующие ав-<br />
в<br />
томобиль с реализацией нормальных<br />
мой FUJI JUKOGYO в Германии. Цель<br />
принципиально достигается (рис. 10)<br />
тормозных свойств.<br />
автономым регулированием углов по-<br />
При разгоне автомобиля, т.е действии ворота левых и правых колес при про-<br />
сил тяги, его масса под действием силы хождении автомобилем поворота с тем,<br />
инерции F в большей степени смещается чтобы уравнять действующие на них<br />
(рис. 8) на задние колеса, подвеска за- продольные и поперечные силы, и осудних<br />
колес сжимается, а передних разществляется изменением длины попегружается,<br />
распределение силы тяги речных рычагов 10 управляемых колес<br />
такое же: большая – на задних колесах механизмом линейного телескопиче-<br />
MR, меньшая – на передних MF. Попеского перемещения электромеханичеречный<br />
наклон оси поворота колеса до ским или гидравлическим сервопри-<br />
точки пересечения характеристики подводом с шарико-винтовым шпинделем<br />
вески вертикальной оси хода колеса при (15), маточной гайкой (12) и втулка-<br />
ее сжатии сначала отрицателен, а при ее ми (11, 13). Телескопический серво-<br />
прохождении становится положительпривод управляется электронным проным<br />
(рис. 4), но принципиально выгляцессорным модулем и периферийными<br />
дит прогрессивно положительным, как исполнительными элементами (14) по<br />
на рис. 9. Восстанавливающий момент сигналам датчиков, отслеживающих<br />
М , возникающий из-за смещения точки<br />
в<br />
приложения силы тяги в центре колеса<br />
скорости движения автомобиля, вращение<br />
колес, рыскания или закручивания<br />
и точки приложения силы торможения в автомобиля вокруг средней вертикаль-<br />
пятне контакта шины с дорогой, вынужной оси, поперечные ускорения автомодает<br />
колесо для реализации сил перейти биля, его замедления, разгоны, останов-<br />
из положения отрицательного развала ку, перемещения поперечных рулевых<br />
внутрь (рис. 2).<br />
тяг, углы поворота рулевого колеса. Бо-<br />
Это определяет отрицательное смелее активное управление с повышенной<br />
щение поперечного наклона оси поворо- устойчивостью автомобиля достигается<br />
та колеса или угла Δ(δ+γ), независимо от использованием гидропривода с элек-<br />
того, тормозится или разгоняется автотромагнитными клапанами с эффективмобиль,<br />
что улучшает его тяговые и торной параболической характеристикой,<br />
мозные свойства. Силы для стабилиза- проходящей через ноль диаграммы «ход<br />
ции и возвращения нормальных свойств подвески – поперечный наклон оси по-<br />
прилагаются в направлении, переводяворота колеса», с его отрицательныщем<br />
автомобиль в состояние со слабой ми максимумами на наибольших ходах<br />
АВТОТРАНСПОРТ: ЭКСПЛУАТАЦИЯ, ОБСЛУЖИВАНИЕ, РЕМОНТ 04 • <strong>2011</strong><br />
61