

8 Dynamika Soustav Těles Uvolňováním-cvičení
8 Dynamika Soustav Těles Uvolňováním-cvičení
8 Dynamika Soustav Těles Uvolňováním-cvičení

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
40<br />
8 DYNAMIKA SOUSTAV TĚLES<br />
Řešení pohybu soustav těles lze řešit v zásadě 3 základními způsoby:<br />
1/ <strong>Uvolňováním</strong> jednotlivých těles ze soustavy a sestavením pohybových rovnic (ať již<br />
Newtonovým nebo D´Alembertovým způsobem) pro jednotlivá tělesa. Vazby mezi tělesy se<br />
přitom zohlední pomocí příslušných kinematických vztahů. Metodu uvolňování hlavně<br />
používáme v případě, kdy nás zajímají hodnoty reakcí (např. jsou-li od těchto hodnot závislé<br />
pasivní odpory). Nevhodné pro složité soustavy<br />
2/ Použitím věty o změně kinetické energie, zákonů zachování energie, hybnosti, momentu<br />
hybnosti tak jak byli zmiňovány pro soustavu hmotných bodů.<br />
3/ Použitím metod analytické mechaniky tj. aplikací principu virtuální práce, metodou redukce<br />
hmotových a silových veličin, obecné rovnice dynamiky, Lagrangeových rovnic II. apod.<br />
Sestavování pohybových rovnic pomocí uvolňování<br />
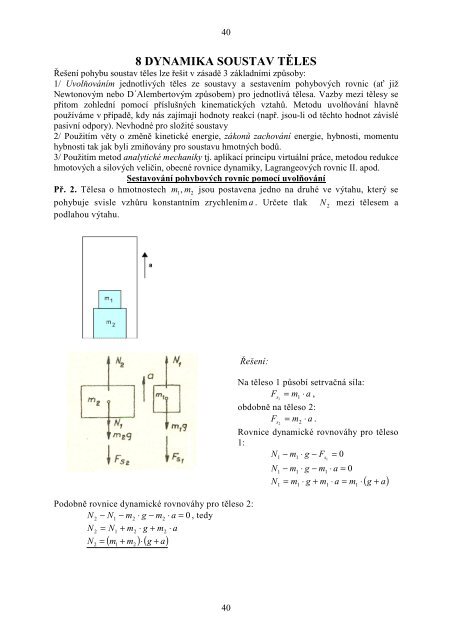
Př. 2. <strong>Těles</strong>a o hmotnostech m<br />
1<br />
, m2<br />
jsou postavena jedno na druhé ve výtahu, který se<br />
pohybuje svisle vzhůru konstantním zrychlením a . Určete tlak N<br />
2<br />
mezi tělesem a<br />
podlahou výtahu.<br />
Řešení:<br />
Podobně rovnice dynamické rovnováhy pro těleso 2:<br />
N<br />
2<br />
− N1<br />
− m2<br />
⋅ g − m2<br />
⋅ a = 0 , tedy<br />
N<br />
2<br />
= N1<br />
+ m2<br />
⋅ g + m2<br />
⋅ a<br />
N m + m ⋅ g + a<br />
( ) ( )<br />
2<br />
=<br />
1 2<br />
Na těleso 1 působí setrvačná síla:<br />
m ⋅ a<br />
F s<br />
=<br />
1 1<br />
,<br />
obdobně na těleso 2:<br />
m ⋅ a<br />
F s<br />
=<br />
2 2<br />
.<br />
Rovnice dynamické rovnováhy pro těleso<br />
1:<br />
N − m ⋅ g − F 0<br />
1 1 s<br />
=<br />
1<br />
1<br />
− m1<br />
⋅ g − m1<br />
⋅ a = 0<br />
1<br />
= m1<br />
⋅ g + m1<br />
⋅ a = m1<br />
N<br />
N ⋅ g + a<br />
( )<br />
40
41<br />
41
42<br />
42
43<br />
a<br />
r<br />
a<br />
r<br />
43
44<br />
SL. 6.21 Vozík, jehož korba má hmotnost M a čtyři kola o celkové hmotnosti m se rozjíždí po<br />
svahu, jehož sklon je β. Valivé odpory a tření v čepech zanedbáme.<br />
a-Vypočítejte zrychlení a v vozíku, jestliže jednotlivá kola se odvalují a považujeme je za<br />
2( M + m)sin<br />
β<br />
stejnorodé válce. [ av<br />
=<br />
g ]<br />
2M<br />
+ 3m<br />
b-Při jaké hodnotě součinitele smykového tření f min začne docházet ke smýkání kol, které<br />
m<br />
z nich se začnou smýkat při l 1 =l 2 =h. [f min = tg 2 M + 3 m β ]<br />
l 1<br />
l 2<br />
m/4<br />
M T<br />
m/4<br />
h<br />
α<br />
β<br />
44
45<br />
2.18.<br />
Malíř pracuje na závěsné sedačce (obr.2.12). Jeho hmotnost je m 1 =72 kg. Potřebuje se rychle i<br />
se sedačkou zvednout. Táhne za provaz takovou silou, že se jeho tlak na sedačku zmenší na<br />
N=400N. Sedačka samotná má hmotnost m 2 =12 kg. Hmotnost kladky zanedbejte. a) Jak velké<br />
je zrychlení malíře a sedačky? b) Jak velké je celkové zatížení kladky?<br />
−2<br />
3,33ms , 1120N<br />
[ ]<br />
45
46<br />
46
47<br />
Metoda redukce silových a hmotových veličin<br />
V případě velkého počtu členů je při metodě uvolňování i velký počet sestavovaných<br />
pohybových rovnic. Pokud nás nezajímají hodnoty reakcí, studovaná soustava těles má jeden<br />
stupeň volnosti a zajímáme se jen o kinematiku některého z členů, je vhodné použití metody<br />
redukce. Pohyb soustavy s jedním stupněm volnosti lze vyjádřit pohybem myšleného členu,<br />
který se pohybuje shodně se zvoleným reálným členem soustavy. Na tento zvolený člen<br />
redukujeme všechny hmoty i všechny pracovní silové účinky. <strong>Těles</strong>o, na které provádíme<br />
redukci, může konat buď rotační pohyb nebo posuvný pohyb. Přitom platí<br />
M<br />
red<br />
= Ired<br />
α , (8.18)<br />
resp.<br />
Fred<br />
= mred<br />
a . (8.19)<br />
Potřebné redukované veličiny určíme z rovnosti kinetických energií skutečné a redukované<br />
soustavy<br />
[ E k<br />
] skutečná<br />
[ E k<br />
] redukovaná<br />
= , (8.11)<br />
z rovnosti výkonů skutečné a redukované soustavy<br />
P = P<br />
(8.12)<br />
[ ] [ ]<br />
skutečný<br />
redukovaný<br />
Příklad 8.8 Určete zrychlení břemene u zdvihacího ústrojí (viz. obr.8.12).<br />
Řešení: Jako základní (redukční) člen si zvolíme posouvající se břemeno 5, jeho poloha je<br />
určena souřadnicí y, jeho rychlost je v= yɺ , zrychlení a= yɺɺ .<br />
Kinetická energie soustavy je dána výrazem<br />
1 1 1 1<br />
EK<br />
= I ɺ ɺ ɺ ϕ<br />
) ɺ<br />
2 2 2 2<br />
kde ϕ<br />
i<br />
jsou úhly natočení jednotlivých členů. Zdvihací ústrojí je soustavou s konstantními<br />
převody. Úhlové rychlosti a úhly natočení hřídelů jsou<br />
2 R3<br />
2 R3<br />
ϕɺ<br />
2<br />
= v ⇒ ϕ2<br />
= y ,<br />
r r<br />
r r<br />
2<br />
2<br />
2<br />
2<br />
2<br />
ϕ<br />
2<br />
+ I3<br />
ϕ3<br />
+ I4<br />
4<br />
+ ( m4<br />
+ m5<br />
y , (a)<br />
2<br />
3<br />
3<br />
2v<br />
2 y<br />
ϕɺ<br />
3<br />
= ⇒ ϕ3<br />
= ,<br />
r<br />
r<br />
v<br />
y<br />
ϕɺ<br />
4<br />
= ⇒ ϕ4<br />
= .<br />
r<br />
r<br />
4<br />
4<br />
3<br />
2<br />
3<br />
(b)<br />
Vztah (a) pro kinetickou energii soustavy můžeme s využitím vztahů (b) přepsat do tvaru<br />
2<br />
1 ⎡ ⎛ 2 R ⎞<br />
3<br />
4 I3<br />
I ⎤<br />
4<br />
2 1 2<br />
E<br />
K<br />
= ⎢ I2<br />
m<br />
2 2 4<br />
m5<br />
v mred<br />
v<br />
2<br />
⎜<br />
⎥ =<br />
r2<br />
r<br />
⎟ + + + +<br />
, (c)<br />
⎢<br />
3<br />
r3<br />
r4<br />
⎥ 2<br />
⎣ ⎝ ⎠<br />
⎦<br />
odkud pro redukovanou hmotnost m<br />
red<br />
plyne<br />
2<br />
⎛ 2 R ⎞<br />
3<br />
4 I3<br />
I4<br />
mred = I2<br />
⎜ + + + m4<br />
+ m5<br />
= konst.<br />
2 2<br />
r2<br />
r<br />
⎟<br />
. (d)<br />
⎝ 3 ⎠ r3<br />
r4<br />
Zanedbáme-li pasivní odpory, výkon pracovních silových účinků M a ( + m ) g je<br />
m4<br />
5<br />
P<br />
= M ϕɺ<br />
2<br />
− ( m4<br />
+ m5<br />
) g v , (e)<br />
což využitím prvního výrazu ze soustavy (b) dává<br />
47
48<br />
α 2<br />
α 3<br />
a) b)<br />
I 3<br />
M<br />
r 2<br />
r<br />
R 3<br />
F red<br />
2<br />
I 2<br />
3<br />
m red<br />
a<br />
r 4<br />
4<br />
q=y<br />
m 4 , I 4<br />
α 4<br />
y<br />
5<br />
m 5<br />
a tudíž podle (8.10) platí<br />
Obr.8.12. Schéma zdvihacího mechanismu - a), redukce na posouvající člen 5 - b).<br />
⎡ 2 R<br />
= ⎢ M<br />
⎣ r2<br />
r<br />
3<br />
P<br />
5<br />
3<br />
⎤<br />
− ( m4<br />
+ m ) g ⎥ v , (f)<br />
⎦<br />
2 R3<br />
= M − ( m4<br />
+ m ) g . (g)<br />
r r<br />
Fred<br />
5<br />
2 3<br />
Dosazením výrazů (g) a (e) do rovnice Fred = mred<br />
a dostaneme pohybovou rovnici<br />
zdvihacího ústrojí ve tvaru<br />
2<br />
2 R ⎡<br />
3 ⎛<br />
2 R3 ⎞<br />
4 I3 I<br />
⎤<br />
4<br />
M − ( m4 + m5 ) g = ⎢<br />
I2 ⎜<br />
⎟<br />
+ + + m<br />
2 2 4 +<br />
m5<br />
⎥<br />
a . (h)<br />
r2 r3 ⎢<br />
r2 r3 r3 r<br />
⎣<br />
⎝<br />
⎠<br />
4<br />
⎥<br />
⎦<br />
48
49<br />
Příklad 8.9. Vyšetřete dobu rozběhu předlohové převodovky (obr.8.13), která je poháněna<br />
konstantním hnacím momentem M<br />
2<br />
působícím na vstupní hřídel 2, a to z klidu na<br />
1<br />
požadované otáčky n<br />
2<br />
( min − ). Výstupní hřídel 4 nechť je zatížen konstantním momentem<br />
M<br />
4<br />
. Pasivní odpory neuvažujte.<br />
z 4<br />
M 4<br />
4<br />
ϕ 4<br />
z 3<br />
3´<br />
ϕ 3<br />
z´3<br />
3<br />
M 2<br />
2<br />
z 2<br />
ϕ 2<br />
Obr.8.13. Schématické znázornění předlohové převodovky.<br />
Řešení. Za základní (redukční) člen vybereme vstupní hřídel 2, který koná rotační<br />
pohyb. Kinetická energie soustavy je dána výrazem<br />
1 2 1 2 1 2<br />
EK<br />
= I ɺ<br />
2<br />
ϕ2<br />
+ I ɺ<br />
3<br />
ϕ3<br />
+ I ɺ<br />
4<br />
ϕ4<br />
.<br />
2 2 2<br />
Uvážíme-li, že platí<br />
z 2<br />
z′<br />
ɺ ϕ ϕ<br />
3 = ɺ<br />
2 ,<br />
3<br />
z2<br />
z′<br />
3<br />
ɺ ϕ4<br />
= ɺ ϕ3<br />
= ɺ ϕ2<br />
,<br />
z3<br />
z4<br />
z3<br />
z4<br />
potom můžeme pro kinetickou energii psát<br />
2<br />
2<br />
1 ⎡ ⎛ z ⎞ ⎛<br />
2<br />
z2<br />
z′<br />
⎞ ⎤<br />
3<br />
2 1 2<br />
EK<br />
= ⎢ I2<br />
+ I3<br />
I4<br />
⎥ ɺ ϕ2<br />
= I ɺ<br />
red<br />
ϕ2<br />
2<br />
⎜<br />
⎢ z<br />
⎟ +<br />
⎜<br />
3<br />
z3<br />
z<br />
⎟<br />
,<br />
4 ⎥ 2<br />
⎣ ⎝ ⎠ ⎝ ⎠ ⎦<br />
odkud pro redukovaný moment setrvačnosti plyne<br />
2<br />
⎛ z ⎞ ⎛ z z′<br />
⎞<br />
2<br />
2 3<br />
Ired = I2<br />
+ I3<br />
⎜ I4<br />
= konst.<br />
z<br />
⎟ +<br />
⎜<br />
3<br />
z3<br />
z<br />
⎟<br />
⎝ ⎠ ⎝ 4 ⎠<br />
Zanedbáme-li pasivní odpory, které jsou závislé na rychlostních a akceleračních poměrech<br />
mechanismu, je výkon pracovních silových účinků (zde dvojic M<br />
2<br />
a M<br />
4<br />
)<br />
⎡ z2<br />
z′<br />
⎤<br />
3<br />
P<br />
= M ɺ<br />
2<br />
ϕ2<br />
− M ɺ<br />
4<br />
ϕ4<br />
= ⎢ M<br />
2<br />
− M<br />
4 ⎥ ɺ ϕ2<br />
= M ɺ<br />
red<br />
ϕ2<br />
,<br />
⎣ z3<br />
z4<br />
⎦<br />
odkud vyplývá pro redukovaný moment výraz<br />
2<br />
49
50<br />
M<br />
z′<br />
2 3<br />
red<br />
= M<br />
2<br />
− M<br />
4<br />
.<br />
z3<br />
z4<br />
Protože převodové ústrojí je soustavou s konstantními převody, pohybová rovnice má tvar<br />
(8.18). Z ní dostaneme úhlové zrychlení vstupního hřídele<br />
z2<br />
z′<br />
3<br />
M<br />
2<br />
− M<br />
4<br />
M<br />
red<br />
z3 z4<br />
α<br />
≡ ɺɺ ϕ2 = =<br />
.<br />
2 2<br />
Ired<br />
⎛ z2 ⎞ ⎛ z2<br />
z′<br />
3<br />
⎞<br />
I2 + I3 ⎜ ⎟ +<br />
I4<br />
⎜ ⎟<br />
⎝ z3 ⎠ ⎝ z3 z4<br />
⎠<br />
Za předpokladu<br />
z2<br />
z′<br />
3<br />
z2<br />
z′<br />
3<br />
M<br />
2<br />
− M<br />
4<br />
> 0 ⇒ M<br />
2<br />
> M<br />
4<br />
,<br />
z z<br />
z z<br />
3<br />
4<br />
je rozběh rovnoměrně zrychlený a potřebný čas pro dosažení otáček n<br />
2<br />
je<br />
t<br />
R<br />
π n2<br />
π n<br />
= =<br />
30α<br />
30<br />
2<br />
2<br />
I<br />
2<br />
+ I<br />
3<br />
z<br />
2<br />
⎛ z ⎞ ⎛<br />
2<br />
z2<br />
z′<br />
⎞<br />
3<br />
⎜ I4<br />
z<br />
⎟ +<br />
⎜<br />
3<br />
z3<br />
z<br />
⎟<br />
⎝ ⎠ ⎝ 4 ⎠<br />
z2<br />
z′<br />
3<br />
M<br />
2<br />
− M<br />
4<br />
z z<br />
3<br />
4<br />
3<br />
4<br />
2<br />
.<br />
50
51<br />
51
52<br />
Postup při sestavení pohybové rovnice pomocí metody redukce při konstantních převodech:<br />
1-Ověříme, zda soustava má 1 0 volnosti.<br />
2- Do pracovního schématu zakreslíme všechny pracovní silové účinky<br />
3-Analyzujeme vazby, není – li některá ideální, příslušný vazební silový účinek zahrneme do<br />
pracovních<br />
4-<strong>Soustav</strong>ou myšleně pohneme. Zakreslíme vektory virtuálních přemístění δ r<br />
j<br />
, δϕ<br />
j<br />
v místech<br />
působišť pracovních sil a pracovních momentů<br />
5- Pokud redukujeme na i-tý člen soustavy, který je translační, pak jeho virtuální posunutí<br />
δ r = δ r = δ r zvolíme jako základní. Všechna zbylá posunutí vyjádříme pomocí tohoto<br />
i<br />
red<br />
základního tj. nalezneme vztahy δr j = f j (δr ) a δϕ f ( δ r)<br />
j<br />
= . Pokud redukujeme na rotační člen,<br />
pak jako základní bereme pootočení tohoto členu δϕi = δϕred<br />
= δϕ a nalezneme vztahy<br />
δ r f δϕ δϕ = f δϕ . Přitom používáme geometrické souvislosti mezi souřadnicemi,<br />
j<br />
= ( ) a ( )<br />
j<br />
j<br />
j<br />
podmínku valení a kinematické vztahy mezi rychlostmi bodů nebo úhlovými rychlostmi těles<br />
6- Napíšeme vztah pro kinetickou energii celé soustavy (jednotlivé rychlosti přitom vyjádříme<br />
pomocí rychlosti redukovaného členu) a členu redukovaného. Z rovnosti obou energií tj. ze vztahu<br />
[ E k<br />
] skutečná<br />
= [ E k<br />
] redukovaná<br />
zjistíme hodnotu redukované hmotnosti resp. redukovaného momentu<br />
setrvačnosti<br />
7- Napíšeme vztah pro virtuální všech práci všech pracovních sil a pracovních momentů<br />
působících v rámci dané soustavy, přitom se řídíme pravidly pro skalární násobení vektorů sil a<br />
vektorů virtuálních přemístění znázorněných na pracovním schématu. Z rovnosti obou virtuálních<br />
δ A = δ A zjistíme redukovanou sílu resp. redukovaný<br />
prací tj. ze vztahu [ ] [ ]<br />
skutečná<br />
redukovaná<br />
moment. Vzhledem k tomu, že u konstantních převodů jsou vztahy mezi rychlostmi a virtuálními<br />
posunutími stejné, můžeme redukovanou sílu resp. redukovaný moment určit také z rovnosti<br />
P = P<br />
výkonů tj. ze vztahu [ ] [ ]<br />
skutečný<br />
redukovaný<br />
8- V případě redukce na translační člen pak zjistíme zrychlení členu na který byla prováděna<br />
redukce ze vztahu<br />
Fred<br />
= mred<br />
a<br />
resp. v případě redukce na rotační člen ze vztahu<br />
M = I α<br />
red<br />
red<br />
j<br />
52
53<br />
53














