Dynamisches Betriebsverhalten - EAL Lehrstuhl für Elektrische ...
Dynamisches Betriebsverhalten - EAL Lehrstuhl für Elektrische ...
Dynamisches Betriebsverhalten - EAL Lehrstuhl für Elektrische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
u<br />
z<br />
System<br />
y<br />
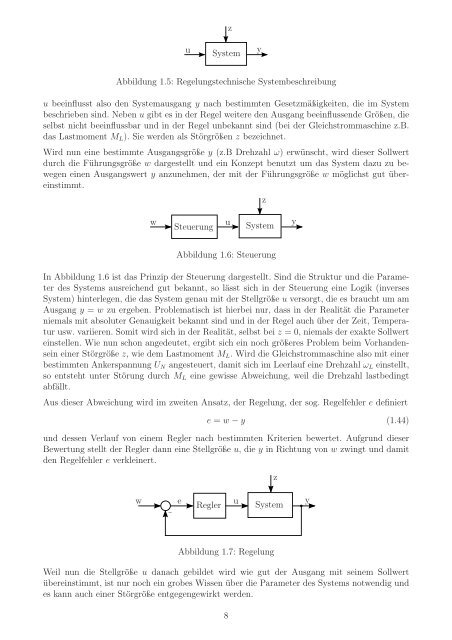
Abbildung 1.5: Regelungstechnische Systembeschreibung<br />
u beeinflusst also den Systemausgang y nach bestimmten Gesetzmäßigkeiten, die im System<br />
beschrieben sind. Neben u gibt es in der Regel weitere den Ausgang beeinflussende Größen, die<br />
selbst nicht beeinflussbar und in der Regel unbekannt sind (bei der Gleichstrommaschine z.B.<br />
das Lastmoment M L ). Sie werden als Störgrößen z bezeichnet.<br />
Wird nun eine bestimmte Ausgangsgröße y (z.B Drehzahl ω) erwünscht, wird dieser Sollwert<br />
durch die Führungsgröße w dargestellt und ein Konzept benutzt um das System dazu zu bewegen<br />
einen Ausgangswert y anzunehmen, der mit der Führungsgröße w möglichst gut übereinstimmt.<br />
z<br />
w<br />
Steuerung<br />
u<br />
System<br />
y<br />
Abbildung 1.6: Steuerung<br />
In Abbildung 1.6 ist das Prinzip der Steuerung dargestellt. Sind die Struktur und die Parameter<br />
des Systems ausreichend gut bekannt, so lässt sich in der Steuerung eine Logik (inverses<br />
System) hinterlegen, die das System genau mit der Stellgröße u versorgt, die es braucht um am<br />
Ausgang y = w zu ergeben. Problematisch ist hierbei nur, dass in der Realität die Parameter<br />
niemals mit absoluter Genauigkeit bekannt sind und in der Regel auch über der Zeit, Temperatur<br />
usw. variieren. Somit wird sich in der Realität, selbst bei z = 0, niemals der exakte Sollwert<br />
einstellen. Wie nun schon angedeutet, ergibt sich ein noch größeres Problem beim Vorhandensein<br />
einer Störgröße z, wie dem Lastmoment M L . Wird die Gleichstrommaschine also mit einer<br />
bestimmten Ankerspannung U N angesteuert, damit sich im Leerlauf eine Drehzahl ω L einstellt,<br />
so entsteht unter Störung durch M L eine gewisse Abweichung, weil die Drehzahl lastbedingt<br />
abfällt.<br />
Aus dieser Abweichung wird im zweiten Ansatz, der Regelung, der sog. Regelfehler e definiert<br />
e = w − y (1.44)<br />
und dessen Verlauf von einem Regler nach bestimmten Kriterien bewertet. Aufgrund dieser<br />
Bewertung stellt der Regler dann eine Stellgröße u, die y in Richtung von w zwingt und damit<br />
den Regelfehler e verkleinert.<br />
z<br />
w<br />
−<br />
e<br />
Regler<br />
u<br />
System<br />
y<br />
Abbildung 1.7: Regelung<br />
Weil nun die Stellgröße u danach gebildet wird wie gut der Ausgang mit seinem Sollwert<br />
übereinstimmt, ist nur noch ein grobes Wissen über die Parameter des Systems notwendig und<br />
es kann auch einer Störgröße entgegengewirkt werden.<br />
8