Präsentationsvortrag - IAG
Präsentationsvortrag - IAG
Präsentationsvortrag - IAG

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1<br />
Hubschrauber-Aeromechanik<br />
Institut für Aerodynamik und Gasdynamik<br />
Sommersemester 2013
Organisation<br />
Vorlesung 14 x Doppelstunde, Montag, 14:00-15:30, V21.01<br />
Dozent Dr. Manuel Keßler, EG 0.37, 0711/685-63419<br />
Kontakt<br />
E-Mail<br />
Institut für Aerodynamik und Gasdynamik,<br />
Pfaffenwaldring 21<br />
kessler@iag.uni-stuttgart.de<br />
Sprechstunde nach Vereinbarung<br />
Skript Wagner-Skript zu 4€<br />
Vortragsfolien – werden online gestellt, soweit verfügbar<br />
WWW Terminverschiebungen, Infos, Materialien, ...<br />
http://www.iag.uni-stuttgart.de/arbeitsgebiete/helikopter/<br />
HubschrauberAeromechanik.html<br />
Prüfung<br />
schriftlich als Teil der Vertiefungsprüfung Strömungslehre<br />
schriftlich (60 min.) im Master, Spezialisierungsrichtung F<br />
mündlich als Wahlfach
Inhalte<br />
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4<br />
2 Begriffe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5<br />
3 Einführung in die Hubschraubertechnik . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
4 Aerodynamik des Rotors im Schwebe- und Senkrechtflug . . . . . . . 36<br />
5 Aerodynamik des Hubschraubers im Vorwärtsflug . . . . . . . . . . . . . . 68<br />
6 Numerische Verfahren zur Berechnung der Aerodynamik . . . . . . 113<br />
7 Grundlagen der Rotordynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4<br />
1 Einleitung<br />
Drehflügler-Konzept sehr alt (Ahorn-Samen, „chinesischer Kreisel”,<br />
„Hubschrauber” von da Vinci)<br />
aber enorm komplex in Umsetzung<br />
schwer überschaubare Aerodynamik<br />
Kopplung von Dynamik und Aerodynamik<br />
hoher Leistungsbedarf<br />
kein (start- und steuerfähiges) Vorbild der Natur!<br />
⇒ technologischer Rückstand gegenüber Flächenflugzeug
5<br />
2 Begriffe<br />
c P<br />
c T<br />
v i<br />
V s<br />
ζ L<br />
Θ<br />
Leistungsbeiwert<br />
Schubbeiwert<br />
induzierte Geschwindigkeit<br />
Steiggeschwindigkeit<br />
Leistungsgütegrad (Figure of Merit, FM<br />
Einstellwinkel
6<br />
3 Einführung in die Hubschraubertechnik<br />
3.1 Historischer Überblick<br />
Frühe Ideen und Versuche<br />
15XX Leonardo daVinci erster Hubschrauberentwurf<br />
1796 Sir George Cayley flugfähiges Modell<br />
1842 W. H. Philipps dampfgetriebenes Modell<br />
Entwurf von daVinci
Erste Erfolge<br />
7<br />
Quadrokopter der Bréguets<br />
1907 Gebrüder Bréguet Quadrokopter<br />
1907 Paul Cornu Tandem<br />
1909 Emile Berliner Koaxialkonfiguration,<br />
später Side-by-side,<br />
steuerfähig, Vorwärtsflug
Weitere technische Meilensteine<br />
8<br />
Tragschrauber C6 von de la Cierva<br />
1922 von Bothezat Quadrokopter, 3 Passagiere,<br />
kollektive Blattverstellung<br />
1923 de la Cierva Tragschrauber mit<br />
Schlaggelenken
Konsequente Weiterentwicklung<br />
9<br />
Koaxialrotor von Pescara<br />
1919-25 Raoul Pescara Koaxialkonfiguration,<br />
zyklische Blattverstellung<br />
1924-29 Baumhauer klassische Heckrotorkonfiguration,<br />
Schlaggelenke, Taumelscheibe<br />
1930 d’Ascanio erfolgreicher Koaxialrotor<br />
(Rekorde in Höhe, Weite, Dauer)
Hin zur Flugtauglichkeit<br />
10<br />
1930 Bréguet/<br />
Dorand<br />
1936 Focke-<br />
Wulf<br />
1939<br />
-41<br />
Igor<br />
Sikorsky<br />
Koaxialkonfiguration,<br />
Schlag- und<br />
Schwenkgelenke,<br />
zyklische Steuerung,<br />
>1 Stunde Flugzeit<br />
Side-by-Side,<br />
Rotor voll gelenkig,<br />
zyklische Steuerung<br />
klassische<br />
Konfiguration<br />
Focke-Wulf FW61<br />
Sikorsky VS 300
Beginnende Nutzbarkeit<br />
11<br />
1938 Flettner FL 265:<br />
Side-by-side<br />
(kämmend),<br />
Weiterentwicklung<br />
FL 282 in Serie,<br />
Drehzahlregelung<br />
1939 Focke-<br />
Achgelis<br />
Side-by-side, 700<br />
km Reichweite,<br />
182 km /h max.,<br />
1300 kg Last,<br />
7100 m Gipfelhöhe<br />
Focke-Achgelis FA223
Weitere Fortschritte<br />
12<br />
1955 Gasturbine größere Leistung, geringeres<br />
Gewicht<br />
1965 Faserverbundblätter Verbesserung von Leistung und<br />
Lebensdauer,<br />
Gewichtsreduktion<br />
Voraussetzung für<br />
1967 lagerloser/<br />
gelenkloser Rotor<br />
geringere Komplexität und<br />
Gewicht, bessere Steuerbarkeit<br />
2005 Klappenrotor individuelle, höherharmonische<br />
Blattsteuerung<br />
2010 Sikorsky X2 Koaxialrotor, Pusher-Antrieb,<br />
Geschwindigkeitsrekord (460<br />
km/h)<br />
201X<br />
fortgeschrittene<br />
Blattgeometrien<br />
Leistungsverbesserung,<br />
Lärmreduktion
13<br />
3.2 Einsatzmöglichkeiten und Verwendungszweck<br />
Einzigartige Fähigkeiten<br />
Schwebeflug<br />
Manövrierfähigkeit in alle Richtungen<br />
Start/Landung ohne Infrastruktur<br />
dadurch sehr flexible Einsatzmöglichkeiten<br />
Transport (Personen, Lasten) ohne Wege<br />
Montage/Kran (Stromleitungen)<br />
Landwirtschaft (Düngung, Schädlingsbekämpfung)<br />
Katastrophenhilfe<br />
Rettungsdienst<br />
Überwachungsaufgaben (Verkehr, Polizei)<br />
Militär (Truppen- und Materialtransport, Sanitätsdienst,<br />
Kampfeinsatz)
14<br />
3.3 Bauweisen und Konfigurationen<br />
Unterschiedliche Auftriebs- und Vortriebskonzepte<br />
Hubschrauber „klassische” Konfiguration mit<br />
Hauptrotor für Auf- und Vortrieb,<br />
Heckrotor zum Drehmomentausgleich<br />
Tragschrauber nicht angetriebener Hauptrotor<br />
für Auftrieb (Autorotationszustand<br />
durch Fahrtwind), Propeller für Vortrieb
Weitere Auftriebs- und Vortriebskonzepte<br />
15<br />
Flugschrauber Antriebsleistung flexibel auf<br />
Hauptrotor und Propeller verteilbar,<br />
Zwitter zwischen Hubschrauber und<br />
Tragschrauber<br />
Kombinations-Flugschrauber (Compound)<br />
zusätzliche Tragfläche zur Auftriebserzeugung<br />
im Schnellflug<br />
Verwandlung-Hubschrauber zusätzlich zur<br />
Tragfläche noch kippbare Rotoren<br />
als Propeller im Schnellflug
16<br />
Drehmomentausgleich<br />
notwendig bei angetriebenem Hauptrotor (nicht Tragschrauber!)<br />
klassisch durch Heckrotor oder Fenestron (ummantelt)<br />
Alternativen:<br />
seitlich auf Rumpf Leitflügel Heckdüse<br />
oder Ausblasen/Coanda-Effekt (NOTAR)
16<br />
Drehmomentausgleich<br />
notwendig bei angetriebenem Hauptrotor (nicht Tragschrauber!)<br />
klassisch durch Heckrotor oder Fenestron (ummantelt)<br />
Alternativen:<br />
seitlich auf Rumpf Leitflügel Heckdüse<br />
oder Ausblasen/Coanda-Effekt (NOTAR)
16<br />
Drehmomentausgleich<br />
notwendig bei angetriebenem Hauptrotor (nicht Tragschrauber!)<br />
klassisch durch Heckrotor oder Fenestron (ummantelt)<br />
Alternativen:<br />
seitlich auf Rumpf Leitflügel Heckdüse<br />
oder Ausblasen/Coanda-Effekt (NOTAR)
16<br />
Drehmomentausgleich<br />
notwendig bei angetriebenem Hauptrotor (nicht Tragschrauber!)<br />
klassisch durch Heckrotor oder Fenestron (ummantelt)<br />
Alternativen:<br />
seitlich auf Rumpf Leitflügel Heckdüse<br />
oder Ausblasen/Coanda-Effekt (NOTAR)
2 Rotoren<br />
17<br />
zwei gegenläufige Rotoren können ihr Drehmoment gerade aufheben<br />
Anordnung über-, neben- oder hintereinander<br />
auch leicht versetzt (kämmend)<br />
letzte Variante: gleichsinnig ???
2 Rotoren<br />
17<br />
zwei gegenläufige Rotoren können ihr Drehmoment gerade aufheben<br />
Anordnung über-, neben- oder hintereinander<br />
auch leicht versetzt (kämmend)<br />
gleichsinnig: Schrägstellen der Rotormaste gegeneinander<br />
(Querkraft am rumpflangen Hebelarm)
3 und 4 Rotoren<br />
18<br />
noch größere Freiheiten bei der Verteilung von Drehrichtungen<br />
und Mastwinkeln<br />
Dreirotorsystem mit unterschiedlichen Leistungen/Durchmessern/<br />
Drehzahlen und/oder Mastneigung
Blattantriebe<br />
19<br />
Drehmomentausgleich am Rumpf nicht notwendig<br />
aber: Giersteuerung auch im Schwebeflug zu gewährleisten<br />
Probleme:<br />
Energietransport (Treibstoff) stehendes → drehendes System<br />
Informationstransport in beide Richtungen<br />
große Massen außen am Blatt (Fliehkräfte, Eigenfrequenzen)
20<br />
3.4 Leistungsstand von VTOL-Fluggeräten<br />
Generelle Trends:<br />
großer Durchmesser ⇒ geringer Leistungsbedarf<br />
kleiner Durchmesser ⇒ hohe Geschwindigkeit
Schub vs. Geschwindigkeit<br />
21<br />
Trends bestätigt:<br />
große Durchmesser ⇒ großer<br />
Schub, geringe Geschwindigkeit<br />
kleine Durchmesser ⇒ geringerer<br />
Schub, höhere Geschwindigkeit<br />
innerhalb einer Technologie:<br />
Schubentwicklung sinkt mit steigender<br />
Geschwindigkeit<br />
Ursache: Leistungsabgabe P o = F S ·v F<br />
ist Schub mal Geschwindigkeit!
Lärmpegel vs. Strahlflächenbelastung<br />
22
Spez. Schub und Abwindgeschw.<br />
23
Pistenbefestigung<br />
24
Flächenbelastung vs. Abfluggewicht<br />
25
Treibstoffverbrauch beim Start<br />
26<br />
Verbrauch (wie auch Leistungsbedarf)<br />
eng gekoppelt<br />
an Strahlflächenbelastung<br />
große Durchmesser ⇒<br />
geringer Verbrauch<br />
kleine Durchmesser ⇒<br />
hohe Geschwindigkeit
Treibstoffverbrauch im Reiseflug<br />
„Badewannenkurve”:<br />
mit steigender Geschwindigkeit<br />
zunächst<br />
Verbrauchs- (und<br />
Leistungs-) abnahme<br />
optimale Wartegeschwindigkeit<br />
(minimaler<br />
Verbrauch pro<br />
Stunde)<br />
optimale Reisegeschwindigkeit (minimaler Verbrauch pro Strecke)<br />
Leistungs- und Verbrauchszunahme durch quadratischen Widerstandszuwachs
Verhältnis Leer- zu Abfluggewicht<br />
28<br />
mit der Zeit fortschreitende Verbesserung beim Nutzlastverhältnis<br />
Verschlechterung mit zunehmender Komplexität
29<br />
3.5 Grundbegriffe<br />
komplexe Mechanik am Rotorkopf<br />
für 3D-Bewegung<br />
Abfolge von Gelenken systemspezifisch<br />
Taumelscheibe zur Steuerübertragung<br />
stehendes → drehendes<br />
System
Blattkoordinaten<br />
30<br />
häufig Verwendung des dimensionslosen Radius x = r R<br />
Sehnenlänge l oder oft auch c (chord)<br />
Radialposition x = 0,7 häufig repräsentativ für Gesamtblatt (Bezugsposition)
Blattgeometrie<br />
31<br />
„klassische” Blattgeometrien<br />
fortgeschrittene Konturen →
Definitionen<br />
32<br />
Geometrie<br />
Blattfläche S B<br />
Blattzahl z<br />
Flächendichte<br />
σ = z S B<br />
S<br />
= z S B<br />
πR 2<br />
typische Werte: σ = 4...8%<br />
Geschwindigkeiten<br />
Vorwärtsgeschwindigkeit V<br />
Umfangsgeschwindigkeit<br />
(Blattspitze) U = Ω R<br />
Fortschrittsgrad µ = V U
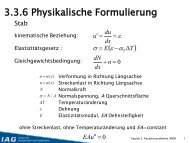
Anstellwinkel<br />
geometrische Bezugsebene:<br />
senkrecht zur Rotorachse<br />
Einstellwinkel θ: Profilsehne<br />
(θ S ) oder Nullauftriebsrichtung<br />
(θ N ) zur Bezugsebene<br />
bei Verwindung:<br />
θ Tip < θ Root ,<br />
θ V = θ Tip − θ Root < 0<br />
aerodynamische Bezugsrichtung:<br />
effektive Anströmung v eff<br />
Induktionswirkung von Blattspitze<br />
und anderen Blättern: α i zwischen<br />
v eff und geometrischer Anströmung<br />
v<br />
effektiver Anströmwinkel α S,eff<br />
(Profilsehne) beziehungsweise<br />
α N,eff (Nullauftriebsrichtung)
Kräfte am Blatt<br />
34<br />
Blattelement dS der Breite dr<br />
Gesamtkraft dR<br />
Zerlegung in<br />
Auftrieb senkrecht zur Anströmung dA = ρ 2 c a V 2 dS<br />
Widerstand parallel zur Anströmung dW = ρ 2 c w V 2 dS
Rotorblattprofile<br />
Profilkriterien:<br />
großer Auftrieb, kleiner Widerstand<br />
großer nutzbarer Machzahlbereich<br />
geringer Nullmomentenbeiwert<br />
gutmütiges Abreißverhalten
4 Aerodynamik des Rotors im Schwebe- und<br />
Senkrechtflug<br />
Einfachster aerodynamischer Fall: Schwebeflug eines Rotors mit<br />
Radius R<br />
Gleichgewichtsbedingung: Schub F S = G<br />
etwas genauer: Einbauwirkungsgrad η E ≈ 98%<br />
⇒ F S = m g<br />
η E<br />
36
4.1 Einfache Strahltheorie<br />
Annahmen:<br />
durchströmte Kreisfläche<br />
Drucksprung ∆p über Rotorkreisebene<br />
gleichmäßige Schubverteilung<br />
rotationsfreie Strömung, keine Verwirbelung<br />
keine Strahlrandeffekte<br />
statischer Druck im Nachlauf (weit weg) gleich Umgebungsdruck<br />
(nur bedingt richtig)<br />
⇒ Anwendung Impulssatz
Strahltheorie<br />
38
39<br />
Impulssatz I<br />
zunächst unbestimmter statischer Druck p 4<br />
Kontrollvolumen als Zylinder mit Radius R 1 (maximaler Zulaufdurchmesser)<br />
Anströmung stromauf mit V 1 (Steiggeschwindigkeit) und p ∞<br />
am Rotor<br />
V 1 + v i (beidseits, stetige Geschwindigkeit, Konti!)<br />
Drucksprung und Schubkraft F S = ∆p S = ∆p πR 2<br />
weiterer Geschwindigkeitsanstieg bis V 4 = V 1 + V 2<br />
seitliches Zuströmen mit V 1 , Luftvolumen<br />
Q = π ( R 2 1 − R2 4<br />
)<br />
V1 + πR 2 4 (V 1 + V 2 ) = πR 2 4 V 2
Impulssatz II<br />
Impulssatz aufstellen<br />
π ( R 2 1 − R 2 4<br />
)<br />
ρV<br />
2<br />
1 + πR 2 4 ρ (V 1 + V 2 ) 2 − πR 2 1 ρV 2 1 − πR 2 4 ρV 1 V 2<br />
auflösen<br />
= F S + πR 2 1 p ∞ − π ( R 2 1 − R 2 4<br />
)<br />
p∞ − πR 2 4 p 4<br />
F S = πR 2 4 (p 4 − p ∞ ) + πρR 2 4 (V 1 + V 2 ) V 2
Druckanteile<br />
Bernoulli aus Zuströmung bis vor Rotor<br />
hinter Rotor bis Nachlauf<br />
p ∞ + ρ 2 V 2 1 = p 2 + ρ 2 V 2<br />
p 3 + ρ 2 V 2 = p v + ρ 2 V 4<br />
2<br />
damit Druckdifferenz<br />
∆p = p 3 − p 2 = p 4 − p ∞ + ρ (<br />
V<br />
2<br />
2 4 − V1 2 )<br />
= p 4 − p ∞ + ρ 2 (2V 1 + V 2 ) V 2
Resultat<br />
Konti bedingt<br />
und damit<br />
(V 1 + v i ) S = (V 1 + V 2 ) πR 2 4<br />
F S<br />
S = ∆p = ρ (V 1 + v i ) V 2 + (p 4 − p ∞ ) V 1 + v i<br />
V 1 + V 2<br />
zusammengefasst also<br />
(<br />
ρ v i − 1 )<br />
2 V 2<br />
V 2 = (p 4 − p ∞ ) V 1 + v i<br />
V 1 + V 2<br />
42
Leistungsbedarf<br />
43<br />
einströmende kinetische Energie (oberer Rand + seitliches Q)<br />
E kin,1 = ρ 2 V 1<br />
2 (<br />
πR<br />
2<br />
1 V 1 + πR4 2 )<br />
V 2<br />
ausströmende kinetische Energie<br />
E kin,4 = ρ (<br />
π ( R1 2 − R 2 )<br />
4 V<br />
3<br />
2<br />
1 + πR4 2 (V 1 + V 2 ) 3)<br />
Differenz (mit Hilfe von Konti)<br />
∆E kin = E kin,4 − E kin,1 = ρ S (V 1 + v i )<br />
(<br />
V 1 + 1 )<br />
2 V 2 V 2<br />
dazu kommt die Druckerhöhung der durchgesetzten Luft<br />
∆E p = (p 4 − p ∞ ) S (V 1 + v i )
klassische Strahltheorie<br />
Annahme: p 4 = p ∞<br />
v i = 1 2 V 2<br />
Geschwindigkeitszuwachs im Nachlauf doppelt so groß wie am Rotor!<br />
Im Steigflug mit V s also<br />
F S = 2ρ S (V s + v i ) v i<br />
und im Schwebeflug (V s = 0) F S = 2ρ S vi<br />
2<br />
beziehungsweise umgekehrt<br />
√<br />
√<br />
F S m g<br />
v i =<br />
2ρS = 2ρ η E S<br />
Gesamtleistung<br />
P = 2ρ S (V s + v i ) 2 v i = F S (V s + v i )
Energiebilanz<br />
„Nutzleistung” im Steigflug ist F S V s<br />
induzierte „Verlustleistung” für Nachlauf ist F S v i<br />
induzierte Schwebeflugleistung<br />
√<br />
Fs<br />
P i =<br />
3 2ρ S<br />
P i beträgt etwa 60% des Gesamtleistungsbedarfs, Rest für<br />
Getriebeverluste<br />
Reibungswiderstand<br />
Heckrotor<br />
ungleichförmige Auftriebsverteilung<br />
Kontraktionsverhältnis<br />
R 2<br />
R = √<br />
vi<br />
V 2<br />
= 1 √<br />
2<br />
45
verbessserte Strahltheorie<br />
46<br />
Annahme p 4 = p ∞ nicht ganz zutreffend<br />
realistischer:<br />
p 4 = p ∞ + ρ 2 V 2 2<br />
Mit relativer Steiggeschwindigkeit ¯V = V 1 /v i<br />
3− 2 k<br />
1−2k<br />
und Beschleunigungsfaktor<br />
k = v i /V 2 erhält man ¯V = und damit im<br />
Schwebeflug ( ¯V = 0) k = 2 3<br />
, also nur noch 50% Geschwindigkeitszuwachs<br />
im Nachlauf.<br />
Schub wird zu<br />
F S = ρS(V S + V 2 )V 2<br />
so dass die induzierte Geschwindigkeit v i = 3√ 2 FS<br />
ρ S<br />
beträgt,<br />
die Schwebeflugleistung liegt wie zuvor bei P = F S (V s + v i ),<br />
allerdings mit der neuen induzierten Geschwindigkeit, die um<br />
1 − 2√ 2<br />
3<br />
≈ 5,6% niedriger liegt als bei p 4 = p ∞ .
Vergleich<br />
Realität zwischen den beiden Extremfällen für p 4<br />
Unterschied vergleichsweise klein (
48<br />
4.2 Vertikaler Sinkflug und Wirbelringstadium<br />
bisherige Betrachtung nur für Schwebe- und Steigflug<br />
notwendig: Durchströmung der Rotorkreisscheibe von oben nach<br />
unten<br />
Sinkflug mit V S ≈ −v i : keine „echte”<br />
Durchströmung mehr<br />
Ergebnis: Rezirkulation innerhalb der<br />
Rotorkreisscheibe<br />
Stabilitätsverlust, hochgradig instationär<br />
⇒ Gefahr!
starker Sinkflug<br />
bei großer Sinkgeschwindigkeit: Windmühlenstadium<br />
Durchströmung von unten nach oben<br />
Abbremsen der durchströmenden Luft<br />
Nachlaufströmung oberhalb<br />
Umkehr des Impulssatzes: aus<br />
v i (V S + v i ) = v 2<br />
i,0<br />
mit induzierter Geschwindigkeit v i,,0 im Schwebeflug beim Steigen<br />
wird im Sinken mit V S ≪ −v i<br />
v i (V S + v i ) = −v 2<br />
i,0
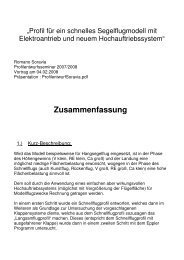
Autorotation<br />
50<br />
normierte Sinkgeschwindigkeit<br />
¯V S = V S /v i,0<br />
normierte induzierte Geschwindigkeit<br />
¯v i = v i /v i,0<br />
Übergangsbereich zwischen<br />
Steigen und „schnell Sinken”<br />
(also ¯V S ≪ −1)<br />
⇒ Wirbelringstadium<br />
Autorotation bei P = 0, leistungsfrei<br />
„ideale” Autorotation bei V S = −v i , also keine Durchströmung<br />
Vergleich Rotorschub ⇔ Widerstand ebene Platte:<br />
F S = 2ρ S v 2<br />
i,0 = ρ 2 V 2 S C w S ⇒ C w = 4/ ¯V 2 S<br />
laut Grafik etwa bei ¯V S = −1,8 ⇒ C w = 1,23
4.3 Blattelementetheorie für den Senkrechtflug<br />
Strahltheorie sehr stark vereinfachend, Ergebnisse insbesondere<br />
unabhängig von Blattgeometrie<br />
Zerlegung der Blätter in Radialschnitte<br />
Anströmung mit V r aus<br />
Tangentialkomponente V t = Ω r<br />
Normalkomponente V n = V S +v i<br />
Auftrieb dA = ρ 2 V 2<br />
r c a l dr, Widerstand dW = ρ 2 V 2<br />
r c w l dr<br />
Einströmwinkel Φ = arctan Vn<br />
V t<br />
51
Kleinwinkelnäherungen<br />
für gewöhnlich kleine Winkel Φ ≈ V S+v i<br />
Ω r<br />
dann auch V 2<br />
r ≈ Ω 2 r 2<br />
sowie dF S ≈ dA<br />
linearer Auftriebsanstieg ab Nullauftriebswinkel bis c a, max<br />
c a ≈ dca<br />
dα (θ N − Φ)<br />
damit dF S ≈ ρ 2 Ω2 r 2 dca<br />
dα (θ N − Φ)l dr<br />
Auftriebsanstieg leich profilabhängig, aber typisch dca<br />
dα ≈ 2π 52
Widerstände<br />
zwei Widerstandsanteile: induzierter (Neigung von dA gegen dF S<br />
um Φ, nur bei Schuberzeugung) und Profilwiderstand (Reibung)<br />
induziert: dW i = sin Φ dA ≈ Φ ρ 2 Ω2 r 2 dca<br />
dα (θ N − Φ)l dr<br />
Moment dM D,i = r dW i und Leistung dP i = Ω dM D,i<br />
Profilwiderstand:<br />
dW P = ρ 2 V r 2 c w l dr ≈ ρ 2 Ω2 r 2 c w l dr<br />
Moment dM D,P = cos Φ r dW P und<br />
Leistung dP P = Ω dM D,P<br />
Widerstandsbeiwert c w (α)<br />
profilabhängig, exemplarisch<br />
c w (α) = 0,0087−0,0216·α+0,4·α 2 53
globale Größen<br />
Integration über Radius und alle Blätter:<br />
dc a<br />
dα<br />
F S = z ρ 2 Ω2 ˆ R<br />
M D = z ρ 2 Ω2 ˆ R<br />
0<br />
0<br />
r 2 dc a<br />
dα (θ N − Φ) l dr<br />
r 3 (<br />
Φ dc a<br />
dα (θ N − Φ) + c w<br />
)<br />
l dr<br />
P = Ω · M<br />
im sehr guter Näherung konstant ≈ 2π<br />
bei Rechteckblatt ist l konstant ⇒ Beiwerte für<br />
F S<br />
ˆ 1<br />
Schub C S =<br />
ρ (ΩR) 2 πR = σ c a (x) x 2 dx = σ<br />
2 2 0<br />
6 C a<br />
M D<br />
Moment C M =<br />
ρ (ΩR) 2 RπR = σ ˆ 1<br />
(c a (x) Φ + c w ) x 3 dx<br />
2 2 0
4.4 Berechnung des Einströmwinkels<br />
v i = Ω r<br />
2<br />
einfache Annahme v i = const. ausreichend für Strahltheorie<br />
genauer: Übertragung der Strahltheorieergebnisse<br />
auf Kreisring<br />
dF S = 2ρ (V S + v i ) v i 2πr dr<br />
Vergleich mit Blattelementeresultat<br />
dF S ( ) =<br />
z ρ dca<br />
2<br />
(Ωr)2<br />
dα<br />
θ N − V S+v i<br />
Ω r<br />
l dr<br />
Gleichsetzen, auflösen (quadratische<br />
Gleichung!) mit λ S = V S<br />
[<br />
Ω r und σ x = zl<br />
πr<br />
√ (<br />
−λ S − dca σ x x<br />
dα 8 + λ S + dca<br />
dα<br />
σ x x<br />
8<br />
) 2<br />
+<br />
dc a σ x x<br />
dα 2 (θ N x − λ S )<br />
]
Schwebeflug<br />
56<br />
im Schwebeflug (V S = 0) einfacher:<br />
⎡<br />
√ ⎤<br />
v i = Ω r ⎣− dc (dca )<br />
a σ x x<br />
2 dα 8 + σ x x 2<br />
+ dc a σ x x<br />
dα 8 dα 2 θ N x⎦<br />
√<br />
σx<br />
Einströmwinkel Φ =<br />
8 c a<br />
Vorsicht bei Nachrechnung: in c a steckt auch Φ!<br />
über c a = dca<br />
dα (θ N − Φ)<br />
Effekt: reduzierter Auftriebsanstieg des Profils<br />
zentraler Unterschied zur Tragflügeltheorie:<br />
Blattschnitte (relativ) unabhängig voneinander
57<br />
4.5 Leistungsgütegrad im Schwebeflug<br />
minimaler Leistungsbedarf aus Impuls- oder Strahltheorie<br />
√<br />
FS<br />
3 P i = F S v i =<br />
(idealer Rotor)<br />
2ρ S<br />
Verluste beim realen Rotor (Profilwiderstand, ungleichförmige Verteilung<br />
der Abwindgeschwindigkeit ⇒ P > P i<br />
Leistungsgütegrad (Figure of Merit) „Wirkungsgrad”<br />
√<br />
ideale Leistung<br />
ζ L = FOM =<br />
benötigte Leistung = FS<br />
3 1<br />
2ρ S M D Ω<br />
idealer ζ L = 1, sehr guter ζ L ≈ 0,8, mäßiger Rotor ζ L ≈ 0,6
Auslegungsgrößen<br />
58<br />
eingesetzte Zahlenwerte<br />
für Leistungsgewicht in<br />
Bodennähe<br />
√<br />
P<br />
G ≈ 20kW /kN G/kN<br />
ζ L ηE<br />
3 S/m 2<br />
≈<br />
11kW /kN<br />
ζ L η 3 E<br />
√<br />
G/kN<br />
R/m<br />
Schwebeflugoptimum Leichtbau, großer Durchmesser<br />
⇒ geringe Drehzahl<br />
aber<br />
Steuerfähigkeit, Schnellflugeigenschaften leiden
59<br />
4.6 Ideale Verwindung für den Schwebeflug<br />
aber<br />
minimaler Leistungsbedarf für v i = const. (unabhängig von r)<br />
Konsequenz: Einströmwinkel Φ ∼ 1 r<br />
Fazit: Produkt aus Auftriebsbeiwert und Tiefe ebenfalls c a ·l ∼ 1 r<br />
Vorgabe: Rechteckblatt, also l = const.<br />
⇒ θ ∼ 1 dca<br />
r<br />
, falls<br />
dα<br />
= const. (i.A. sehr gut erfüllt)<br />
schwierig zu bauen<br />
große Probleme mit großem θ und c a im Innenbereich (→ ∞)<br />
einfachere Alternative<br />
lineare Verwindung (typisch θ V = −5 bis − 10°)<br />
günstiger im Vorwärtsflug, Einbußen im Schwebeflug nur 2-4%
60<br />
4.7 Optimaler Rotor für den Schwebeflug<br />
aber<br />
Voraussetzung wieder:<br />
Produkt aus Auftriebsbeiwert und Tiefe c a · l ∼ 1 r<br />
Alternative Vorgabe: c a = const.<br />
⇒ l ∼ 1 r , α N,eff = const.<br />
immer noch θ ∼ θ 0 + 1 r<br />
Blatttiefe an der Wurzel auch sehr groß (→ ∞)<br />
einfachere Alternative<br />
Praxis<br />
Trapezblatt mit Zuspitzung 1:2 bis 1:3<br />
Leistung vergleichbar lineare Verwindung (wenige Prozent Einbuße)<br />
optimierte Kombination aus Umriss und Verwindung
61<br />
4.8 Bodeneffekt im Schwebeflug<br />
Aufstaueffekt in Bodennähe<br />
Überdruck unter Rotor<br />
Reduktion der induzierten Geschwindigkeit<br />
mehr Schub/weniger Leistungsbedarf
61<br />
4.8 Bodeneffekt im Schwebeflug<br />
Aufstaueffekt in Bodennähe<br />
Überdruck unter Rotor<br />
Reduktion der induzierten Geschwindigkeit<br />
mehr Schub/weniger Leistungsbedarf
Schub/Leistung im Bodeneffekt<br />
62<br />
realistische Rotorhöhe beim Abflug h/R ≈ 0,3<br />
Leistungsbedarf<br />
Schub
63<br />
4.9 Einfluss endlicher Blattzahl<br />
Strahltheorie und Blattelementetheorie vereinfachen stark<br />
beispielsweise Blattzahl und Tiefe nur als Produkt<br />
Verbesserung durch Wirbeltheorien<br />
= äquivalent zu Traglinientheorie beim Starrflügler:<br />
gebundene Wirbel entlang der Blätter erzeugen Auftrieb<br />
stromab spiralförmige Wirbel entsprechend Zirkulationsgradient<br />
Summe aller Wirbel induzieren Geschwindigkeiten am Blatt<br />
Problem: Position der Nachlaufwirbel a priori unbekannt<br />
prescribed wake vorgeschriebene Position (in etwa ja bekannt)<br />
free wake Position als zusätzliche Unbekannte, wird mit gelöst bis<br />
Position, Konvektion und Induktion konsistent
Wirbeltheorien<br />
64<br />
näherungsweise Methode geht zurück auf Betz, Prandtl, Glauert,<br />
Lock und Goldstein (Propeller)<br />
Berücksichtigung der<br />
Umströmung der Blattspitze mit Auftriebsverlust<br />
endliche Blattzahl<br />
endliche Winkel<br />
einfacher: Blattspitzenverlustfaktor nach Blattzahl und Schubbeiwert<br />
ganz einfach: Blatt um eine halbe Tiefe verkürzen<br />
Ursache: brauchbare Rotoren haben relativ ähnliche Kenngrößen
Blattspitzeneffekte<br />
65
66<br />
4.10 Überschlägige Leistungsberechnung im Schwebeflug<br />
Voraussetzung: ideal verwundener Rotor,<br />
Blattspitzenverlustfaktor B = 1 − l<br />
2R<br />
Schub F S = z ρ 4 Ω2 B 2 R 3 dca<br />
dα (θ R − Φ R ) l<br />
Schubbeiwert C S = B 2 σ dc a<br />
4 dα (θ R − Φ R )<br />
(<br />
Drehmoment M D = z ρ 2 Ω2 R 4 B 2<br />
2 Φ R dca<br />
dα (θ R − Φ R ) + c w,0<br />
4<br />
+ cw,α<br />
3 (θ R − Φ R ) + c w,α 2<br />
2<br />
(θ R − Φ R ) 2 )<br />
l<br />
(<br />
B 2<br />
2 Φ R dca<br />
dα (θ R − Φ R ) + · · ·<br />
Drehmomentenbeiwert C D = σ<br />
√<br />
√<br />
C<br />
an der Spitze Φ R = S<br />
und θ<br />
2B 2 R = 4C S<br />
+ σ dca<br />
dα B2<br />
nach innen hyperbolisch verwunden Φ = Φ R·R<br />
r<br />
C S<br />
2B 2<br />
)<br />
und θ = θ R·R<br />
r
Leistungsabschätzung<br />
67<br />
C S aus Schub, Luftdichte (Höhe), Blattgeometrie und Blattzahl<br />
induzierter Momentenbeiwert C D,i = C 3/2<br />
√S<br />
2B<br />
, Profil C D,p aus<br />
Schwebeflugleistung P = (C D,i + C D,p ) ρ (ΩR) 3 πR 2<br />
Korrektur je nach Belastung, Verwindung und Zuspitzung 0−8%
68<br />
5 Aerodynamik des Hubschraubers im Vorwärtsflug<br />
5.1 Induzierte Geschwindigkeit im Vorwärtsflug<br />
Voraussetzung bisher: keine Vorwärtsgeschwindigkeit<br />
induzierte Geschwindigkeit im Vorwärtsflug genauso wichtig für<br />
effektiven Anströmwinkel und damit Auftrieb, Widerstand, Leistung<br />
und Blattbewegung<br />
allgemeine Lösung bei endlicher Blattzahl nicht möglich<br />
Vorschlag von Glauert: kreisförmige Tragfläche, elliptische Auftriebsverteilung<br />
⇒ v i =<br />
F S<br />
2ρ S V ′ = const. mit Rotorkreisfläche S<br />
√<br />
und V ′ = Vh 2 + (V v + v i ) 2 (Anströmkomponenten V h , V v )<br />
reproduziert Impulstheorie im Schwebeflug!
Erweiterungen<br />
69<br />
konstante Abwindverteilung nur bedingt<br />
realistisch<br />
Tragflügeltheorie: Aufwind vorne,<br />
mehr Induktion hinten:<br />
v<br />
i ′ = v i (1 + K r R<br />
cos ψ)<br />
typischer Wert für K ≈ 1,2<br />
noch detaillierter: Fourierzerlegung<br />
nach Mangler und Squire<br />
[<br />
vi MS c ∞ ]<br />
0<br />
= 4v i<br />
2 − ∑<br />
c n (µ,α R ) cos nψ<br />
n=1<br />
mit nur geraden Koeffizienten,<br />
µ 2 = 1 − r 2<br />
und Anstellwinkel α<br />
R 2<br />
R<br />
der Rotorkreisscheibe<br />
Definition Azimuth ψ,<br />
hinten ist bei ψ = 0
5.2 Unsymmetrie der Anströmung im Vorwärtsflug<br />
vektorielle Überlagerung von<br />
Vorwärts- und Umfangsgeschwindigkeit<br />
ungleichförmig<br />
⇒ Asymmetrie der Anströmung<br />
ψ = 0° (hinten) nur Ωr<br />
ψ = 90° (vorlaufend) Ωr + V h<br />
ψ = 180° (vorne) nur Ωr<br />
ψ = 270° (rücklaufend) Ωr − V h<br />
dynamischer Druck proportional zum<br />
Geschwindigkeitsquadrat!
Transsonische Strömung<br />
Addition von Umfangs- und Vorwärtsgeschwindigkeit<br />
groß am<br />
vorlaufenden Blatt (außen)<br />
transsonische Profilumströmung<br />
im schnellen Vorwärtsflug ⇒<br />
Verdichtungsstöße<br />
subsonische Strömung über<br />
Rest des Umlaufs<br />
Auf- und Abbau der Stöße vor<br />
und nach 90°<br />
starke instationäre Druckunterschiede<br />
⇒ Lärm (High Speed<br />
Imulsive noise, HSI)
Weitere Strömungsphänomene<br />
72<br />
Differenz von Umfangs- und Vorwärtsgeschwindigkeit am rücklaufenden<br />
Blatt<br />
sehr niedrige dynamische Drücke<br />
Rückanströmung im inneren Bereich (r < µR)<br />
Rollmomentenhaushalt erfordert gleichen Auftrieb links wie rechts<br />
große Auftriebsbeiwerte und Anstellwinkel<br />
⇒ Abreißgefahr (Dynamic Stall, DS)!<br />
Schräganströmung vorne und hinten<br />
⇒ Grenzschichtaufdickung
73<br />
5.3 Schlagbewegung des Rotorblattes<br />
Rollmomentenhaushalt durch zyklische<br />
Anstellwinkeländerung (Taumelscheibe)<br />
aber auch durch Schlagbewegung<br />
(um β) des Blattes:<br />
Aufwärtsbewegung reduziert α eff<br />
Abwärtsbewegung erhöht α eff<br />
dadurch wechselnde Auftriebe<br />
stationäres „Schlagen” auch im<br />
Schwebeflug:
73<br />
5.3 Schlagbewegung des Rotorblattes<br />
Rollmomentenhaushalt durch zyklische<br />
Anstellwinkeländerung (Taumelscheibe)<br />
aber auch durch Schlagbewegung<br />
(um β) des Blattes:<br />
Aufwärtsbewegung reduziert α eff<br />
Abwärtsbewegung erhöht α eff<br />
dadurch wechselnde Auftriebe<br />
stationäres „Schlagen” auch im<br />
Schwebeflug:<br />
Konuswinkel wegen Auftrieb und Zentrifugalkraft<br />
β = β 0 = const. ≈ 4 − 6°
Blattschlagen<br />
reale Schlagwinkel bis etwas über 10°<br />
Beispiel Vorwärtsflug:<br />
größte Elongation um Ψ ≈ 200°,<br />
nicht bei 90°!<br />
Schlagamplitude grob proportional<br />
zum Schub<br />
Azimuth maximaler Elongation<br />
leicht wachsend mit Schub<br />
Ursache: Anstellwinkeländerung aus<br />
zusätzlicher Vertikalkomponente ∆V<br />
des Blattes gegenüber Luft<br />
Wirkung: Anstellwinkeländerung<br />
kompensiert (in etwa) dynamische<br />
Druckänderung<br />
Ausführung: artikulierte (explizite)<br />
Schlaggelenke oder elastischer Blatthals<br />
74
Quantifizierung<br />
75<br />
quantitative Bestimmung der Schlagbewegung:<br />
blattfestes Koordinatensystem<br />
Ursprung im Schlaggelenk (Drehachsenabstand a · R)<br />
i längs des Blattes<br />
j senkrecht dazu nach vorne<br />
k senkrecht nach oben<br />
Massenträgheitsmomente I i , I j , I k<br />
Drehgeschwindigkeitskomponenten in Hauptachsenrichtungen<br />
ω i = Ω sin β, ω j = − ˙β, ω k = Ω cos β
Bewegungsgleichung<br />
Zentripetalbeschleunigung senkrecht zur Drehachse ist aΩ 2 R<br />
Hauptachsenzerlegung davon ist −aΩ 2 R cos β, 0, aΩ 2 R sin β<br />
Drehimpulserhaltung um Schlaggelenk A<br />
I j ¨β =<br />
ˆ R(1−a)<br />
0<br />
ˆ R(1−a)<br />
−<br />
0<br />
r dF k −<br />
ˆ R(1−a)<br />
0<br />
Ω 2 r ′ r sin β dm<br />
r g cos β dm<br />
mit r ′ = r cos β + aR
stabförmiges Blatt<br />
77<br />
Annahme dünner, homogener Stab der Masse m B und Länge R(1−a)<br />
Massenträgheitsmoment um A dann I j = I k = 1 3 m BR 2 (1 − a) 2<br />
damit wird<br />
I j ¨β = F k,ψ r i − 1 2 R(1 − a)m B g cos β<br />
(<br />
−Ω 2 sin β I j cos β + m B a 1 − a )<br />
2 R2<br />
Blattschub F k,ψ im Abstand r i vom Blattgelenk A periodisch<br />
wechselnd über Umlauf ⇒ periodisch wechselndes β
Lösung<br />
78<br />
Zunahme von β<br />
⇒ Zunahme des Hebels der Zentrifugalkraft<br />
⇒ Kraft entgegen der Auslenkung<br />
⇒ rückstellendes Moment ∼ = Feder<br />
Kleinwinkelnäherung: sin β ≈ β, cos β ≈ 1<br />
⇒ (Schwingungs-)Gleichung der Form a ¨β + bβ + c = d(ψ)<br />
∞∑<br />
Lösung: β = a 0 − (a ν cos νψ+b ν sin νψ) ≈ β 0 +A β sin(ψ+ψ 0 )<br />
ν=1<br />
√<br />
Eigenfrequenz ω e = Ω 1 + 3 2<br />
a<br />
1−a<br />
für a = 0 (Schlaggelenk am Mast) wird ω e = Ω, also Anregung<br />
mit Eigenfrequenz ⇒ Resonanz!
Resonanzrotor<br />
79<br />
Schlaggelenksabstand a = 0 ⇒ Resonanz<br />
schwingendes System in Resonanz: Phasenverschiebung von 90°<br />
zwischen Anregung und Auslenkung<br />
hier: maximaler Schub bei ψ S<br />
ψ S + 90°<br />
⇒ maximaler Schlagwinkel bei<br />
außerdem: maximale Schlaggeschwindigkeit bei ψ S<br />
also trägheitslos: maximale Geschwindigkeit<br />
bei maximaler Kraft<br />
Ergebnis: Verringerung des (effektiven)<br />
Anstellwinkels und damit Schubs<br />
⇒ gleichförmiger Schub über Umlauf<br />
durch Neigung der Rotorkreisfläche
Resonanzrotor<br />
79<br />
Schlaggelenksabstand a = 0 ⇒ Resonanz<br />
schwingendes System in Resonanz: Phasenverschiebung von 90°<br />
zwischen Anregung und Auslenkung<br />
hier: maximaler Schub bei ψ S<br />
ψ S + 90°<br />
⇒ maximaler Schlagwinkel bei<br />
außerdem: maximale Schlaggeschwindigkeit bei ψ S<br />
also trägheitslos: maximale Geschwindigkeit<br />
bei maximaler Kraft<br />
Ergebnis: Verringerung des (effektiven)<br />
Anstellwinkels und damit Schubs<br />
⇒ gleichförmiger Schub über Umlauf<br />
durch Neigung der Rotorkreisfläche<br />
nach hinten
ealer Fall<br />
80<br />
Schlaggelenksabstand in der Regel a > 0<br />
nicht ganz in Resonanz<br />
Anregung leicht unterhalb Eigenfrequenz<br />
Phasenverschiebung etwas unterhalb 90°<br />
maximale Auslenkung nicht ganz vorne sondern etwas früher (rechts)<br />
kein Schlaggelenk (gelenkloser/lagerloser Rotor)?<br />
⇒virtuelles Schlaggelenk entsprechend der Biegelinie
weitere Effekte<br />
81<br />
konstante Auslenkung im Schwebeflug β 0 ⇒ Konuswinkel<br />
(abhängig von Blattmasse, Zentrifugalkraft vs. Schub)<br />
Anregung eher ∼ sin 2 ψ als ∼ sin ψ ⇒ höherharmonische Effekte<br />
zusätzliche (zu wechselndem dynamischen Druck) Anregung<br />
durch Konuswinkel<br />
Anströmung vorne von unten, hinten<br />
von oben ⇒ Mehrauftrieb vorne<br />
durch Phasenverschiebung Neigung<br />
der Rotorkreisfläche nach rechts<br />
in Summe Blätter auf Kegelmantelfläche,<br />
Achse nach hinten rechts geneigt
Betrachtungsweisen<br />
Kontrollachse A (Taumelscheibennormale):<br />
keine Einstellwinkeländerung<br />
Kegelachse B: keine Schlagbewegung<br />
Mastachse: Einstellwinkeländerung+Schlagbewegung<br />
höherharmonische Anteile: kleine „Wackelbewegungen” auf Kegelmantelfläche<br />
Schlaggelenksabstand a = 0: keine Momentübertragung auf Mast<br />
⇒ nur Kraft entlang Blattachse<br />
⇒ Resultierende (Schub) in Kegelachsenrichtung
Betrachtungsweisen<br />
Kontrollachse A (Taumelscheibennormale):<br />
keine Einstellwinkeländerung<br />
Kegelachse B: keine Schlagbewegung<br />
Mastachse: Einstellwinkeländerung+Schlagbewegung<br />
höherharmonische Anteile: kleine „Wackelbewegungen” auf Kegelmantelfläche<br />
Schlaggelenksabstand a = 0: keine Momentübertragung auf Mast<br />
⇒ nur Kraft entlang Blattachse<br />
⇒ Resultierende (Schub) in Kegelachsenrichtung ⇒ Widerstand!
Betrachtungsweisen<br />
Kontrollachse A (Taumelscheibennormale):<br />
keine Einstellwinkeländerung<br />
Kegelachse B: keine Schlagbewegung<br />
Mastachse: Einstellwinkeländerung+Schlagbewegung<br />
höherharmonische Anteile: kleine „Wackelbewegungen” auf Kegelmantelfläche<br />
Schlaggelenksabstand a = 0: keine Momentübertragung auf Mast<br />
⇒ nur Kraft entlang Blattachse<br />
⇒ Resultierende (Schub) in Kegelachsenrichtung ⇒ Widerstand!<br />
Steuerung über Neigung der Kegelachse (Taumelscheibe)<br />
Schlaggelenksabstand a > 0: Momentenübertragung möglich,<br />
deutlich verbesserte Steuerwirkung
83<br />
5.4 Schwenkbewegung des Rotorblattes<br />
im Vorwärtsflug<br />
außer Schlagbewegung<br />
senkrecht zur Achse auch<br />
veränderliche Kräfte in<br />
Drehrichtung<br />
⇒ Schwenkbewegung<br />
Gelenk E (artikuliert oder<br />
virtuell), Winkel ξ<br />
zwei Ursachen:<br />
1 wechselnder Widerstand<br />
(∼ dynamischer Druck)<br />
2 Corioliskräfte durch<br />
Schlagbewegung
Coriolisschwenken<br />
84<br />
Schlagbewegung<br />
⇒ wechselnder Schwerpunktsabstand<br />
zur Drehachse<br />
⇒ Beschleunigung/Verzögerung<br />
(Drehimpulserhaltung!)<br />
Beispiel vorlaufendes Blatt (Schlagen nach oben):<br />
Beschleunigung nach vorne ⇒ Verringerung von ξ<br />
allerdings auch: effektive Anströmung von oben ⇒ Neigung des<br />
Schubvektors nach hinten ⇒ Vergrößerung von ξ<br />
quantitativ von gleicher Größenordnung ⇒ durch geschickte Anordnung<br />
(Gelenke, Winkel) in erster Näherung kompensierbar
Schwenkverlauf<br />
85<br />
und<br />
schub-<br />
Mittelwert<br />
Amplitude<br />
abhängig<br />
pre-lag je nach Gelenksposition<br />
Abstand 0 des<br />
Schwenkgelenks<br />
nicht möglich
Schwenkverlauf<br />
85<br />
und<br />
schub-<br />
Mittelwert<br />
Amplitude<br />
abhängig<br />
pre-lag je nach Gelenksposition<br />
Abstand 0 des<br />
Schwenkgelenks<br />
nicht möglich –<br />
Antriebsmoment!
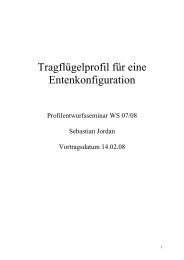
5.5 Komponentenzerlegung der Anströmgeschwindigkeit<br />
Annahmen<br />
geometrisch<br />
unverwundene Rechteckblätter<br />
kleine Winkel Φ, β<br />
Schlaggelenksabstand a = 0<br />
kinematisch<br />
nur Schlagen erster Ordnung<br />
kein Schwenken<br />
aerodynamisch<br />
induzierte Geschwindigkeit konstant<br />
keine Radialkomponenten der Anströmgeschwindigkeit<br />
keine Rückanströmung<br />
keine Blattspitzenverluste<br />
keine elastischen Verformungen<br />
86
Zuströmung<br />
Kontrollachse (und Schubvektor) um α nach vorne geneigt<br />
resultierende Kraft mit Vorwärtskomponente (Rumpfwiderstand)<br />
Horizontalgeschwindigkeit V h und induzierte Geschwindigkeit<br />
v i =<br />
F S<br />
2ρ S V<br />
Fortschrittsgrad µ = V h cos α<br />
Ω R<br />
Durchflussgrad λ = V h sin α + v i<br />
Ω R<br />
resultierende Anströmgeschwindigkeit<br />
√<br />
V = (V h cos α) 2 + (V h sin α + v i ) 2 = Ω R √ µ 2 + λ 2
Anströmung<br />
88<br />
Blattschnitt am Radius r unter Azimuth<br />
ψ<br />
Anströmung senkrecht zur Kontrollachse<br />
v t = Ω r + V h cos α sin ψ<br />
Anströmung parallel zur Achse<br />
v n = (V h sin α + v i ) cos β + (r −<br />
aR) ˙β + V h cos α cos ψ sin β<br />
bei kleinem(<br />
a ≪ 1 und β ≪ 1 )<br />
v n = ΩR λ + µβ cos ψ + r dβ<br />
R dψ<br />
wegen ˙β = dβ<br />
dt = dβ dψ<br />
dψ dt<br />
= Ω dβ<br />
dψ
5.6 Gesamtkräfte und -momente am Rotor<br />
Φ aus eben berechneten v n und v t bestimmen<br />
mit gegebener Geometrie (z, l, θ) Schub und Moment über Blattlänge<br />
integrieren<br />
Schubbeiwert<br />
C S = σ 2<br />
(<br />
dc a θ<br />
dα 3 + 1 2 θµ2 − λ )<br />
2<br />
und Schub F S = ρ(ΩR) 2 πR 2 · C S sowie<br />
Momentenbeiwert<br />
C D = σ (<br />
cw<br />
2 4 (1 + µ2 ) + dc a<br />
dα<br />
− 1 8 (a2 1 + b 2 1) − µ2<br />
2<br />
( λθ<br />
3 − λ2<br />
2 + µλ<br />
( a<br />
2<br />
0<br />
2 + 3 8 a2 1 + 1 8 b2 1<br />
2 a 1−<br />
)<br />
+ µ ))<br />
3 a 0b 1<br />
und Moment M D = ρ(ΩR) 2 RπR 2 · C D<br />
89
5.7 Koeffizienten der Schlagbewegung<br />
Voraussetzungen wie bisher, also<br />
β = a o − a 1 cos ψ − b 1 sin ψ<br />
˙β = Ω(a 1 sin ψ − b 1 cos ψ)<br />
¨β = Ω 2 (a 1 cos ψ + b 1 sin ψ) = Ω 2 (a 0 − β)<br />
kein Schlaggelenksabstand a, damit System in Resonanz, also<br />
quasi trägheitslose Blätter<br />
Ausgleich der Schubänderungen durch Schlaggeschwindigkeiten,<br />
damit konstanter Schub über Umlauf, also konstantes Schlagmoment<br />
M S = F S r S,eff<br />
Blattgewichtsmoment M B = m B g R 2<br />
⇒<br />
¨β + ω 2 β = M S − M B<br />
I S<br />
90
Lösung<br />
91<br />
Ω 2 (a 0 − β) + Ω 2 β M S − M B<br />
I S<br />
also einen Konuswinkel von a 0 = M S−M B<br />
ΩI 2 S<br />
integriertes Schlagmoment<br />
M S =<br />
ˆ R<br />
a<br />
( 2<br />
+<br />
3<br />
+<br />
r dF S = ρ 2 lΩ2 R 4 dc [<br />
a θ<br />
dα 4 (1 + µ2 ) − λ 3 +<br />
µθ −<br />
µλ<br />
2 − a 1<br />
4 + a 1<br />
8 µ2 )<br />
(<br />
b1<br />
4 − a 0<br />
3 µ + b 1<br />
8 µ2 )<br />
cos ψ<br />
sin ψ<br />
]<br />
mit M B ≠ M B (ψ) folgt M S ≠ M S (ψ) und damit müssen die Klammern<br />
vor sin ψ beziehungsweise cos ψ verschwinden!
Ergebnis<br />
92<br />
M S = ρ 2 lΩ2 R 4 dc (<br />
a θ<br />
dα 4 (1 + µ2 ) − λ )<br />
3<br />
a 0 =<br />
ρ<br />
2 lΩ2 R 4 ( dca θ<br />
dα 4 (1 + µ2 ) − λ )<br />
3 − mB g R 2<br />
I S Ω 2<br />
mit Lock-Zahl (Massenfaktor) γ = ρ dca l R 4<br />
dα I S<br />
a 0 = γ 2<br />
=<br />
[ θ<br />
4 (1 + µ2 ) − λ 3<br />
]<br />
− R m Bg<br />
2I S Ω 2<br />
aerodynamische Kräfte<br />
Trägheitskräfte<br />
und a 1 = ( 8 3 θ − 2λ)µ 4µa 0<br />
1 − 1 , b 1 =<br />
2 µ2 3(1 + 1 2 µ2 )<br />
typisch ist γ ≈ 10..12, a 1 (Neigung nach hinten) massenunabhängig,<br />
Konuswinkel und Neigung seitlich massenabhängig!
5.8 Weitere resultierende Kräfte am Rotor<br />
außer Schub F S (Kraft in Richtung Kontrollachse) weitere Kräfte<br />
Radialkomponente von dF S durch Konus- und Schlagwinkel<br />
resultierende Anteile nach vorne/hinten oder seitlich durch asymmetrische<br />
Anströmung und/oder Blattschlagen<br />
Integration über Blattlänge und Umlauf, Beispiel Widerstand:<br />
F W = z ˆR<br />
ρ<br />
2π 2 l<br />
0<br />
ˆ2π<br />
0<br />
[<br />
c w v 2 t sin ψ + dc a<br />
dα<br />
−β ( θv 2 t − v n v t<br />
)<br />
cos ψ<br />
) ] dψ dr<br />
((<br />
θvt v n − vn<br />
2 )<br />
sin ψ−<br />
und analog Lateralkraft (quer)<br />
Alternativinterpretation: resultierende Kraft in Richtung Kegelachse,<br />
wegen Schlagbewegung geneigt gegen Kontrollachse, deshalb<br />
Komponenten senkrecht dazu
94<br />
5.9 Betriebsbereiche der Rotorblattprofile<br />
Randbedingungen<br />
große Mach- und Reynoldszahlvariation über Radius und Umlauf<br />
teilweise Anstellwinkel bis ±180° (bei kleinen Staudrücken)
94<br />
5.9 Betriebsbereiche der Rotorblattprofile<br />
Randbedingungen<br />
große Mach- und Reynoldszahlvariation über Radius und Umlauf<br />
teilweise Anstellwinkel bis ±180° (bei kleinen Staudrücken)<br />
aerodynamische Anforderungen<br />
große Auftriebsbeiwerte am rücklaufenden Blatt<br />
minimale Widerstandsbeiwerte bei hohen Machzahlen<br />
harmlose Überziehcharakteristik<br />
geringe Momentenbeiwerte, auch beim dynamic Stall<br />
ausreichende strukturelle Dicke<br />
Toleranz gegenüber Verschmutzung, Oberflächenfehlern, ...
Profilparameter<br />
95<br />
widerstreitende Anforderungen<br />
⇒ Kompromisse<br />
Auftrieb, Widerstand, Moment<br />
Dicke, Wölbung, S-Schlag
Profilparameter<br />
95<br />
widerstreitende Anforderungen<br />
⇒ Kompromisse<br />
Auftrieb, Widerstand, Moment<br />
Dicke, Wölbung, S-Schlag<br />
Betrachtung über 360° Anstellwinkelbereich<br />
und 0,1 < Ma < 0,9 nötig!
360°-Profilpolaren<br />
96
Rückanströmung/Transsonik<br />
97<br />
Rückanströmungsgebiete wachsend mit Fortschrittsgrad µ<br />
Transsonik (Kompressibilitätseinfluss, Verdichtungsstöße) zunehmend<br />
mit Drehzahl und Fluggeschwindigkeit
Polarenbereiche<br />
3 Bereiche von Interesse: großer Auftrieb, große Gleitzahl, große<br />
Machzahl
Dickeneinfluss<br />
99<br />
gestrichelt 8%, durchgezogen 12%<br />
besserer Auftrieb dickerer Profile bei kleinen Machzahlen<br />
Widerstandszuwachs und geringerer Auftrieb bei Transsonik
Wölbungseinfluss<br />
größeres Auftriebsvermögen mit<br />
Wölbung<br />
aber auch größeres Moment<br />
Einbruch bei hohen Machzahlen<br />
Saugspitze ⇒ Transsonik!<br />
Maximalauftrieb bei mittleren<br />
Machzahlen nötig (rücklaufendes<br />
Blatt außen)
Dynamic Stall<br />
101<br />
instationär größere Anstellwinkel und Auftriebsbeiwerte möglich<br />
aber starkes Anwachsen von Widerstand und Moment<br />
vor allem bei kleineren Machzahlen relevant
Stallverhalten<br />
Oszillation um t/4-Linie<br />
Effekt abhängig von<br />
reduzierter Frequenz k =<br />
Ωl<br />
2 u ∞<br />
Amplitude<br />
Mittelwert<br />
Machzahl (Ma ↑ ⇒ weniger DS)
Profilauswahl<br />
103<br />
Rotorprofile sind immer ein Kompromiss<br />
stark unterschiedliche Betriebsbereiche (Machzahl, Auftrieb)<br />
verschiedene relevante Flugzustände (Schweben, Reiseflug, Lastvielfache)<br />
nicht nur statisches, auch dynamisches Verhalten (Strömungsabriss)<br />
von großer Bedeutung<br />
zusätzliche strukturelle Randbedingungen (Dicke, Momentenbeiwert)<br />
Optimierung für jede Radialposition möglich
104<br />
5.10 Dreidimensionale Effekte<br />
eindimensionale (Impulstheorie) oder quasi-zweidimensionale Behandlung<br />
(Blattelementetheorie) unzureichend<br />
dreidimensionale Effekte wesentlich<br />
für lokale Phänomene<br />
Wirbelbildung und -interaktion<br />
Pfeilung<br />
Transsonik<br />
Akustik<br />
nichtkonstante Abwindverteilung<br />
Vorwärtsflug prinzipiell hochgradig<br />
dreidimensional
Querströmungen<br />
radiale Strömungskomponenten unter Einfluss von<br />
Zentrifugalkraft (bis 1000 g!)<br />
Schräganströmung (Vorwärtsflug)<br />
105
Randwirbel<br />
106<br />
Wirbelschichten durch radial<br />
veränderliche Auftriebsverteilung<br />
Aufrollen zu Randwirbeln (ähnlich<br />
Starrflügler)<br />
Interaktion mit nachlaufenden<br />
Blättern: lokale Induktion nach<br />
oben: Auftriebszuwachs<br />
unten: Auftriebsdefizit<br />
Interaktion längs<br />
⇒ lokaler Einfluss<br />
Interaktion quer<br />
⇒ momentane Wirkung
Pfeilung<br />
Druckverteilung (und generell Strömung) stark beeinflusst durch Pfeilung<br />
Reduktion am Pfeilungsbeginn<br />
Verschärfung ganz an der Spitze<br />
107
Durchflussmodelle<br />
108<br />
einfache Durchflussmodelle unzureichend für Induktionswirkung<br />
und damit die Auftriebsverteilung<br />
und damit den Durchfluss...
5.11 Lärmmechanismen<br />
Unterschiedliche Lärmquellen am Hubschrauber<br />
Antrieb<br />
Triebwerksein- und auslass (Verdichter, Turbine, Strahl)<br />
Getriebe/Antriebsstrang<br />
Drehmomentausgleich<br />
Rotor<br />
Heckrotor/Fenestron<br />
Ausblasung<br />
Turbulenzlärm<br />
High Speed Impulsive (HSI) Noise<br />
(Verdichtungsstöße im schnellen Vorwärtsflug)<br />
Blade Vortex Interaction (BVI) Noise<br />
(Aufschneiden von Randwirbeln)<br />
Relevanz unterschiedlich, je nach Flugsituation
HSI – High Speed Impulsive Noise<br />
110<br />
transsonische Umströmung<br />
im schnellen Vorwärtsflug<br />
am vorlaufenden<br />
Blatt ⇒ Verdichtungsstoß<br />
subsonische Umströmung<br />
später im Umlauf<br />
⇒ kontinuierlicher Aufund<br />
Abbau von Stößen<br />
stark schwankende Drücke<br />
⇒ Schall<br />
konstruktive Überlagerung<br />
in Flugrichtung<br />
vor allem hochbelastete<br />
(Zweiblatt-) Rotoren (UH1)<br />
auch bei Lastvielfachen!
BVI – Blade Vortex Interaction<br />
111<br />
Randwirbel induzieren Vertikalgeschwindigkeiten an nachfolgenden<br />
Blättern ⇒ Auftriebs- und Druckschwankungen<br />
nur im Sinkflug mit v Sink ≈ v i ⇒ Randwirbel in Rotorebene<br />
besonders intensiv bei parallelem BVI (längs des Blattes)<br />
konstruktive Überlagerung bei Abstrahlung nach schräg unten
Maßnahmen<br />
HSI<br />
langsamer!<br />
Drehzahlreduktion<br />
Mehrblattrotoren<br />
Pfeilung<br />
dünne Außenprofile<br />
Verwindung<br />
BVI<br />
anderer Anflugpfad (steiler, flacher)<br />
⇒ größerer Abstand<br />
Randwirbel „verschmieren” (allmählicher<br />
Zirkulationsabbau)<br />
Randwirbel/Blattposition verschieben<br />
IBC – Individual Blade Control<br />
HHC – Higher Harmonic Control<br />
Ansteuerung jeweils über zusätzliche<br />
Aktuatoren wie Klappen
6 Numerische Verfahren zur Berechnung der<br />
Aerodynamik<br />
6.1 Panelverfahren<br />
Feldverfahren zur potenzialtheoretischen Beschreibung der Strömung<br />
⇒ reibungsfrei, drehungsfrei innerhalb des Strömungsfelds<br />
Ausgangspunkt: kompressible Potenzialgleichung<br />
) (1 − u2<br />
a 2 Φ xx +<br />
(1 − v 2 )<br />
a 2 Φ yy +<br />
(1 − w 2 )<br />
a 2 Φ zz −<br />
− 2uv<br />
a 2 Φ xy − 2vw<br />
a 2 Φ yz − 2wu<br />
a 2 Φ zx = 0<br />
mit ⃗u = (u,v,w) = ∇Φ und a2<br />
a∞<br />
2 = 1 − κ − 1 ) (1<br />
Ma∞<br />
2 − |⃗u|2<br />
u∞<br />
2 (bei<br />
isentroper Strömung)
Umformung<br />
Zerlegung in inkompressiblen (Potenzialtheorie) und kompressiblen<br />
Anteil<br />
Integration mit Satz von Green in Oberflächen- und Volumenanteile<br />
Φ =<br />
Quellen/Senken<br />
Dipole<br />
{ ¨ }}( ) { { ¨ }} {<br />
1 ∂Φ 1 1<br />
dS + Φ ∂ ( ) 1<br />
dS+<br />
4π S ∂n r 4π S ∂n r<br />
+ 1 ˚ ( ) 1<br />
∇ 2 Φ dV<br />
4π V r<br />
} {{ }<br />
Kompressibilit -at<br />
Quellen/Senken: Verdrängungswirkung (endliche Dicke)<br />
Dipole: Auftriebserzeugung (Kraft)<br />
inkompressibel entfällt der letzte Volumenterm, das Problem ist<br />
bestimmt durch die Randbedingungen ⇒ Randelementemethoden<br />
114
Anwendung<br />
Randbedingungen an Oberfläche<br />
( ∂Φ<br />
∂n<br />
= 0), Nachlauf (Potenzialsprung<br />
δΦ = W ) und im Fernfeld<br />
(Φ ∞ = 0)<br />
Auftrieb aus Kutta-Bedingung<br />
Dipolstärke Nachlauf aus HK-<br />
Randbedinung<br />
freie Konvektion der Nachlaufdipole<br />
Aufrollen Randwirbel<br />
Strahlkontraktion<br />
Anlaufwirbel<br />
gegebenenfalls Berücksichtigung<br />
Kompressibilität
6.2 Euler- und Navier-Stokes-Verfahren<br />
„Königsklasse” der Simulation<br />
kaum (außer Turbulenz) physikalische<br />
Modellierung<br />
Erhaltungsglei-<br />
Ausgangspunkt:<br />
chungen<br />
Masse<br />
Impuls<br />
Energie<br />
volle Berücksichtigung (fast) aller<br />
Strömungsvorgänge und Abhängigkeiten<br />
dazu Zustandsgleichung und Turbulenzmodell ⇒ partielle Differenzialgleichungen<br />
räumliche Diskretisierung mit Hilfe von Gitternq0<br />
Integration in der Zeit<br />
116
117<br />
Anwendung<br />
Berücksichtigung von Starrkörperbewegung<br />
(Schlagen) und<br />
Verformung (Biegung, Torsion)<br />
⇒ gekoppelte Simulation<br />
detaillierte (räumlich und zeitlich)<br />
Analyse des Strömungsfeldes<br />
⇒ besseres Verständnis der Strömungsphänomene
Beispiele<br />
118
119<br />
7 Grundlagen der Rotordynamik<br />
7.1 Rotorsysteme<br />
Unterschiedliche Konzepte des Blattanschlusses<br />
gelenkig oder elastisch<br />
Abfolge und Abstände von Schlag-, Schwenk- und Pitchgelenk<br />
(Feder-) Steifigkeiten, Dämpfung der Gelenke<br />
Winkel der Gelenke
Gelenkige Systeme<br />
120
Gelenkwinkel<br />
121<br />
Schwenkgelenk α<br />
Schlaggelenk δ<br />
Neigung gegen die Achsen<br />
δ 1 gegen x-Achse<br />
δ 2 gegen y-Achse<br />
δ 3 gegen z-Achse<br />
(Schlagachse)<br />
δ 3 -Effekt: Änderung Blatteinstellwinkel infolge Schlagen (Blattwinkelrücksteuerung):<br />
Blatt schlägt hoch ⇒ dreht zu<br />
Zweck: zusätzlicher statischer Rückstelleffekt zum dynamischen<br />
(Erhöhung der effektiven Federkonstante), Phasenverschiebung
δ 3 -Kinematik<br />
122<br />
zwei mögliche Varianten:<br />
1 schräggestelltes Schlaggelenk,<br />
Anlenkpunkt entlang<br />
Gelenkachse<br />
∆Φ = tan δ 3 β<br />
2 gerades Schlaggelenk,<br />
Anlenkpunkt außerhalb<br />
Gelenkachse<br />
∆Φ = − b c β<br />
dynamische Komponente: ∆Φ ≈ − 1 Ω ˙β
Klassische Blattkinematik<br />
123<br />
gelenkiger Rotor aller drei Lager (Schlagen, Schwenken, Pitchen) sind<br />
explizit artikuliert ⇒ klare Verhältnisse, mechanisch komplexer<br />
Aufbau<br />
halbstarrer Rotor (teetering) kein Schwenkgelenk, Lagerung der durchgehenden<br />
Blattachse unterhalb des Schlaggelenks wegen<br />
Corioliskräften<br />
Elastomer-Lager in drei Richtungen elastisches<br />
Lager, Zentrifugalkraft<br />
auf Druck, Lagerkräfte auf<br />
Scherung
Gelenkiger vs. gelenkloser Blattanschluss<br />
124
Gelenklose Blattkinematik<br />
125
Vorteile gelenkloser Systeme<br />
126<br />
mechanisch wesentlich einfacherer Aufbau<br />
Anzahl Teile<br />
Schmierung<br />
Wartung/Lebensdauer<br />
Masse<br />
deutlich höhere Steuermomente<br />
bessere Steuerfolgsamkeit<br />
geringere Taumelscheibenausschläge<br />
kleinere Blattbewegungen (Schlagen ⇒<br />
Schwenken)<br />
größere Endgeschwindigkeit
Lagerloser Rotor<br />
Wegfall auch des Torsionsgelenkes<br />
Realisierung über Flexbeam (Elle-Speiche)<br />
Torsionsfreiheitsgrad innen (Schwanenhals)<br />
Anlenkung über Steuertüte
7.2 Blattwinkelverstellung und Rotorsteuerung<br />
Blattsteuerwinkel und Blattschlagen sind eng miteinander verknüpft<br />
(auch ohne δ 3 -Effekt)<br />
Schlagwinkel<br />
β = a o − a 1 cos ψ − b 1 sin ψ<br />
⇒ Rotorkegelachse (keine<br />
Schlagbewegung) senkrecht<br />
zur Blattspitzenebene, effektive<br />
Schubrichtung<br />
Blattsteuerwinkel Φ = A o − A 1 cos ψ − B 1 sin ψ<br />
⇒ Kontrollachse (keine zyklische Blattverstellung) senkrecht zur<br />
Taumelscheibe<br />
Steuereingaben führen zur Änderung der Kontrollachse, relativ zu der<br />
die Rotorkegelachse (ungefähr) gleich orientiert bleibt<br />
⇒ Änderung des Schubvektors
Kontrollachse<br />
129<br />
Unterschiedliche Möglichkeiten zur Neigung der Kontrollachse<br />
direkte Kopfneigung (oft<br />
Tragschrauber)<br />
Taumelscheibe
Taumelscheibe<br />
130<br />
Steuerstangen (stehender Teil)<br />
mit Steuerknüppel verbunden<br />
Stoßstangen (drehender Teil) mit<br />
Blattwinkelverstellung verbunden<br />
Mitnehmer auf beiden Seiten zur<br />
definierten azimuthalen Fixierung<br />
kollektive Steuerung durch Heben/Senken<br />
zyklische Steuerung durch Neigen<br />
Blattspitzenebene folgt in etwa<br />
Taumelscheibenneigung
Fortgeschrittene Blattverstellung<br />
131<br />
Taumelscheibensteuerung unterliegt Einschränkungen<br />
alle Blätter identisch<br />
sinus-/kosinusförmig über einen Umlauf<br />
gleichförmig entlang des Blattes<br />
weitergehende Steuerungsmöglichkeiten wünschenswert für<br />
Lärm<br />
Vibrationen<br />
Leistung (Transsonik, Dynamic Stall)<br />
fortschrittliche Konzepte<br />
IBC – Individual Blade Control<br />
HHC – Higher Harmonic Control<br />
Klappen, aktive Verwindung
HHC – Higher Harmonic Control<br />
132<br />
Φ n =<br />
primäre Steuereingaben durch<br />
Taumelscheibe<br />
zusätzliche Aktuatoren in jeder<br />
Steuerstange ⇒ zusätzliche höherfrequente<br />
Taumelbewegung<br />
zu jedem festen Zeitpunkt korrespondierende<br />
Lage aller Blätter<br />
entspricht zeitvariablen à 1 (t) und ˜B 1 (t)<br />
Blattsteuerwinkel<br />
A o<br />
}{{}<br />
kollektiv<br />
−A 1 cos ψ − B 1 sin ψ<br />
} {{ }<br />
zyklisch<br />
∑j max<br />
−<br />
j=2<br />
j max<br />
∑<br />
A j cos(jψ) − B j cos(jψ)<br />
j=2<br />
} {{ }<br />
höherharmonisch
IBC – Individual Blade Control<br />
133<br />
zusätzliche Aktuatoren in jeder<br />
Stoßstange<br />
⇒ individuelle Blattverstellung<br />
kann bei entsprechender Ansteuerung<br />
auch HHC<br />
technisch sehr aufwändig<br />
(Hydraulikschleifring)<br />
Blattsteuerwinkel<br />
Φ n =<br />
A o<br />
}{{}<br />
kollektiv<br />
−A 1 cos ψ − B 1 sin ψ −<br />
} {{ }<br />
f n (ψ)<br />
} {{ }<br />
zyklisch individuell
Hinterkantenklappe<br />
134<br />
Primärsteuerung weiter durch<br />
Taumelscheibe<br />
Klappenausschlag durch piezoelektrische<br />
oder magnetostriktive<br />
Aktuatoren<br />
Hebelverstärkung wegen geringen<br />
Ausschlags<br />
Ansteuerung als HHC oder IBC<br />
Wirkprinzip je nach Auslegung und Torsionssteifigkeit<br />
Wölbklappe (Auftrieb)<br />
Ausschlag nach unten zur Auftriebserhöhung<br />
Servoklappe (Moment)<br />
Ausschlag nach unten lässt Blatt zudrehen<br />
⇒ Auftriebsverringerung
135<br />
ATR-A<br />
Projekt LARS (lagerloses aktives Rotorsystem<br />
Erstflug September 2005 (Eurocopter, Donauwörth)
Aktive Verwindung<br />
136<br />
Verwindung des Blattes<br />
diagonale Einlage von Piezofasern<br />
zusätzlich zur Taumelscheibe<br />
aerodynamisch effizienter als Hinterkanten(servo)klappe
137<br />
7.3 Dynamik des gelenklosen Rotors<br />
„starrer” Blattanschluss ohne artikulierte Gelenke<br />
aber näherungsweise äquivalent zu „virtuellem” Gelenk in spezifischem<br />
Mastabstand<br />
Biegung konzentriert auf kleinen Bereich in Mastnähe<br />
große Gelenksteifigkeit ⇒ Übertragung von Momenten möglich<br />
wirkliches Blatt ⇔ Ersatzblatt mit Ersatzgelenk
Schlagbiegung<br />
138<br />
im Blatt nahezu biegemomentfrei<br />
Momentenaufbau im elastischen<br />
Hals<br />
linearer Verlauf im Anschlussbereich<br />
fiktives Gelenk an „Knickstelle”<br />
(etwa 10-15% R = aR)<br />
Gelenksteifigkeit C β<br />
Schlageigenfrequenz<br />
√<br />
ω β = Ω<br />
1 + 3 2 a + C β<br />
I S<br />
≈ 1,1...1,2 Ω
Schlagphase<br />
139<br />
wegen ω β > Ω keine Resonanz<br />
mehr ⇒ Phasenverschiebung < 90 ◦<br />
Erinnerung: Rotorkegelachse nicht<br />
nur nach hinten, sondern auch seitlich<br />
(wegen Konuswinkel)<br />
damit maximaler Schlagwinkel bei<br />
Ψ > 90° (≈ 100 − 110° ) bei<br />
Schlaggelenksabstand a = 0<br />
Phasenverschiebung < 90° beim gelenklosen<br />
Rotor kompensierbar!<br />
⇒ flugmechanische Vorteile<br />
(Entkopplung Nicken/Rollen)
140<br />
7.4 Einfluss der Schwenksteifigkeit<br />
kaum aerodynamische Dämpfung der Schwenkbewegung<br />
⇒ Schwenkdämpfer beim gelenkigen Rotor<br />
Schwenkeigenfrequenz ω ζ ≈ 0,2...0,3 Ω (gelenkig),<br />
ω ζ ≈ 0,3...1,5 Ω (gelenklos)<br />
große Ausschläge und Biegemomente bei schwenksteifen gelenklosen<br />
Rotoren mit ω ζ ≈ Ω
Schwenksteifigkeit<br />
141
142<br />
7.5 Koppeleffekte des gelenklosen Rotors<br />
Freiheitsgrade mit zugehörigen Achsenlagen und -richtungen<br />
Schlagen<br />
Schwenken<br />
Pitchen<br />
weitere elastische Verformungen in Blatt und Steuerkinematik<br />
unterschiedliche Lagen von neutraler Achse für Biegen und Torsion<br />
Massenverteilung<br />
Pfeilung der Blattachsen<br />
⇒<br />
sehr komplexe dynamische Strukturauslegung (radialer Verlauf<br />
von Steifigkeiten, Massenkonzentration) mit Rückwirkung<br />
auf Aerodynamik
143<br />
7.6 Dynamik der Schlag- und Schwenkbewegung<br />
Schlagbewegung des Einrotorpaddels<br />
„kleines” Einzelpaddel (∆R · l) mit Punktmasse m, Schlaggelenksabstand<br />
a = 0
Schlagdynamik<br />
Anströmgeschwindigkeitskomponenten v t = ΩR(1+µ sin ψ) und<br />
v n = ΩR(λ + µβ cos ψ + β/Ω) ˙<br />
Momentengleichgewicht um Schlaggelenk<br />
I ¨β = A R − m 1 gR cos β − m 1 Ω 2 R R sin β<br />
Kleinwinkelnäherung und I = m 1 R 2 ergibt<br />
¨β + Ω 2 β = − g R + A<br />
m 1 R<br />
( )<br />
Auftrieb ist A = c a q ∞ l∆R ≈ dca<br />
dα<br />
θ − vn ρ<br />
v t 2 v t 2 l∆R<br />
Mit γ =<br />
ρ<br />
2m 1<br />
l∆R dca<br />
dα<br />
R erhält man<br />
¨β + γ(1 + µ sin ψ)Ω ˙β + Ω 2 [1 + γ<br />
(<br />
µ cos ψ + 1 )]<br />
2 µ2 sin 2ψ β<br />
= − g R + γΩ2 [ θ 0<br />
(<br />
1 + 2µ sin ψ + µ 2 sin 2 ψ ) − λ − µλ sin ψ ] 144
Schlagdynamik II<br />
Mit ˙β = Ω dβ<br />
dψ und ¨β = Ω 2 d 2 β<br />
dψ 2<br />
Schlagen) zu<br />
wird der homogene Teil (für freies<br />
d 2 [ (<br />
β<br />
dβ<br />
+γ(1+µ sin ψ)<br />
dψ2 dψ + 1 + γ µ cos ψ + 1 )]<br />
2 µ2 sin 2ψ β = 0<br />
DGL leider nicht analytisch lösbar<br />
mögliche Aussagen anhand der DGL<br />
Koeffizient vor ˙β beziehungsweise dβ<br />
dψ<br />
positiv wegen µ < 1<br />
⇒ positive Dämpfung, stabile Lösung<br />
Dämpfung maximal am vorlaufenden, minimal am rücklaufenden<br />
Blatt (vor allem bei großem µ)<br />
Schwebeflug: ¨β + Ωγ ˙β + Ω 2 β = 0<br />
Lösung β = A 1 cos ω 1 t + B 1 sin ω 2 t) mit ω 1 ≠ Ω ≠ ω 2<br />
(umlaufende Rotorkegelachse!)
146<br />
Schwenkbewegung des Einrotorpaddels<br />
Position des Blattschwerpunktes im<br />
Blattkoordinatensystem (⃗i,⃗j, ⃗ k) ist<br />
⃗r =⃗iR cos β +⃗j0 + ⃗ kR sin β<br />
Geschwindigkeit ⃗v = d⃗r<br />
dt = ∂⃗r<br />
∂t + Ω ⃗ ×⃗r<br />
mit Ω ⃗ = ⃗ kΩ und<br />
∂⃗r<br />
∂t = − ⃗iR sin β ˙β +⃗j0 + ⃗ kR cos β ˙β<br />
(<br />
⇒ ∂2 ⃗r<br />
= −⃗iR cos β ˙β 2 + sin β ¨β<br />
∂t 2<br />
und Ω ⃗ ( )<br />
× ⃗Ω ×⃗r<br />
)<br />
+⃗j0 + ⃗ (<br />
)<br />
kR − sin β ˙β 2 + cos β ¨β<br />
= −⃗iΩ 2 R cos β sowie 2 ⃗ Ω × ∂⃗r<br />
∂t = −2 ⃗jΩR sin β ˙β
Schwenkbewegung<br />
Gesamtbeschleunigung<br />
⃗a = ¨⃗r = −⃗i R<br />
Coriolisbeschleunigung (⃗j)<br />
2ΩR sin β ˙β<br />
infolge Schlagbewegung ˙β<br />
Zentrifugalkraft F Z<br />
Corioliskraft F C<br />
„Widerstand” W 1<br />
(Reibung + induziert)<br />
(<br />
)<br />
cos β ˙β 2 + sin β ¨β + Ω 2 cos β<br />
−⃗j R 2Ω sin β ˙β<br />
− ⃗ (<br />
)<br />
k R sin β ˙β 2 − cos β ¨β<br />
Bewegungsgleichung Schwenken<br />
I ζ ¨ζ + F Z eR sin ζ 1 + F C R 1 − W 1 R 1 = 0
Schwenklösung<br />
148<br />
ganz analog zur Schlagbewegung<br />
Zentrifugalkraft F Z = m 1 Ω 2 R<br />
e+(1−e) cos ζ<br />
cos ζ 1<br />
Corioliskraft F C = −2R(1 − e)Ωm 1 sin β ˙β<br />
Widerstand W 1 ≈ A v [ ]<br />
n<br />
− W = ρ<br />
v<br />
2 l∆R dca<br />
dα v n (θv t − v n ) − vt 2 c w<br />
t<br />
keine analytische Lösung (ψ in W 1 )<br />
kein (direkter) Dämpfungsterm!<br />
freie Schwenkbewegung mit Schwenkeigenfrequenz ω ζ =<br />
√<br />
e<br />
1−e Ω<br />
enge Kopplung mit Schlagbewegung (Coriolisterme!)
149<br />
Schlagbewegung des homogenen<br />
Balkenblattes<br />
Momentengleichgewicht um<br />
Schlagachse analog Paddel<br />
(I ¨β=A R−m 1 g R cos β−m 1 Ω 2 R R sin β)<br />
ˆR<br />
0<br />
ˆR<br />
dm<br />
dr r 2 dr ¨β =<br />
0<br />
ˆR<br />
dA<br />
dr rdr −<br />
0<br />
dm<br />
dr<br />
g r cos βdr − Ω2<br />
R<br />
ˆ<br />
0<br />
dm<br />
dr sin βr 2 dr<br />
nach Integration (homogen!) qualitativ gleich dem Rotorpaddel<br />
nur unterschiedliche Koeffizienten<br />
⇒ gleiches Verhalten (Dämpfung, freies Schlagen)
150<br />
7.7 Kopplung von Aerodynamik und Rotordynamik<br />
Vielzahl möglicher Anregungen und Eigenformen<br />
Luftkräfte ⇒ Verformungen<br />
Verformungen ⇒ Auftrieb/Widerstand (Trim, Akustik)<br />
gekoppelte Simulation von<br />
Aerodynamik (Euler-, Navier-Stokes-Gleichungen)<br />
Strukturmechanik (Balkenmodell, Schalenmodell)
Aerodynamik<br />
151<br />
gekoppelte Rechnung auch möglich mit Blattelemente- oder Wirbelleiterverfahren<br />
aber vorrangig mit CFD<br />
Chimera-Technik eingebetteter<br />
Netze<br />
Gitterbewegung (Rotation,<br />
Schlagen, Schwenken, Pitchen)<br />
mit Chimera<br />
Gitterdeformation aufgrund<br />
elastischer Verformung der<br />
Blattoberfläche<br />
Austausch mit Strukturlöser jeden<br />
Zeitschritt (1°, stark) oder<br />
je Periode (90° bei 4-Blattrotor,<br />
schwach) über Fourierkoeffizienten
Strukturdynamik<br />
unterschiedliche Modellierungskomplexität<br />
Starrkörpermodell mit artikulierten Gelenken<br />
linearer Biegebalken<br />
nichtlinearer Balken mit virtuellen Gelenken<br />
Schalenmodell<br />
Volumenmodell<br />
Mehrkörpersystem beispielsweise für Anlenkungssteifigkeiten<br />
Austausch mit Strömungslöser stark (Zeitschritt) oder schwach<br />
(Fourierkoeffizienten)
Trimmung<br />
153<br />
Trimmung gut integrierbar (vor allem in schwache Kopplung) für<br />
Zielgrößen in Kräften und Momenten<br />
Schubtrimmung am wichtigsten<br />
danach Nick- und Rollmoment<br />
Heckrotor und Lage für Gesamtheli<br />
(nahezu) Periodizität vor neuem Trimmschritt<br />
Trimmkonvergenz über zahlreiche Trimmschritte<br />
kollektiv<br />
Heck<br />
Nick<br />
Richtung<br />
Roll<br />
Lage
154<br />
Kopplung<br />
Austausch<br />
Fluid → Struktur: Luftkräfte<br />
Struktur → Fluid: Verformungen, Geschwindigkeiten<br />
stark: Momentanzustand jeden Zeitschritt (typisch 1°)<br />
schwach: Fourierkoeffizienten von Kräften und Verformungen/<br />
Geschwindigkeiten pro Periode (2-Blatt 180°, 5-Blatt 72°)<br />
gemeinsame Integration der Differenzialgleichungen sehr schwierig,<br />
da stark unterschiedliches Verhalten (Fluid 1. Ordnung, Struktur<br />
2. Ordnung)
Ergebnis<br />
155
156<br />
7.8 Flugmechanik<br />
„klassische” Hubschrauberkonfiguration ist asymmetrisch<br />
⇒ Rolllage im Schwebeflug<br />
Hauptrotordrehrichtung links ⇒ Heckrotorschub nach rechts<br />
Hauptrotorschub nach links ⇒ Rolllage nach links<br />
Vorwärtsflug<br />
6 Bedingungen (drei Kräfte, drei Momente im Gleichgewicht)<br />
7 Vorgaben (drei Lagewinkel, kollektiver und zwei zyklische Winkel,<br />
Heckrotor)<br />
⇒ mehrere Kombinationen aus Lage- und Steuerwinkel für einen<br />
Flugzustand!<br />
anschaulich: Nick- und Rolllage statt zyklischer Ausschläge zur<br />
Neigung der Blattspitzenebene
157<br />
Unterschiede zum Starrflügler<br />
Starrflügler<br />
Hubschrauber<br />
Flugstabilität eigenstabil indifferent–labil<br />
Pilotenbelastung gering hoch<br />
Leistungsbedarf gering–mäßig hoch–sehr hoch<br />
Minimalgeschwindigkeit mäßig 0<br />
Maximalgeschwindigkeit hoch mäßig<br />
Autopilot Standard in Entwicklung<br />
Flugrichtung vorwärts allseitig<br />
Infrastruktur befestigte Piste ebene Fläche
Ende<br />
158