Kompetenzen und Referenzen der LMT LMT's competences and ...
Kompetenzen und Referenzen der LMT LMT's competences and ...
Kompetenzen und Referenzen der LMT LMT's competences and ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Zul. Restwucht/Wuchtkörpermasse<br />
Admissible unbalance/mass of the balancing body in gmm/kg (e in µm)<br />
80<br />
63<br />
50<br />
40<br />
31,5<br />
25<br />
20<br />
16<br />
12,5<br />
10<br />
8<br />
6,3<br />
5<br />
4<br />
3,15<br />
2,5<br />
2<br />
1,6<br />
1,25<br />
1<br />
0,8<br />
0,63<br />
0,5<br />
0,4<br />
0,315<br />
0,25<br />
0,2<br />
0,16<br />
0,125<br />
0,1<br />
0,08<br />
0,063<br />
0,05<br />
0,04<br />
Uzul ezul = = 3,34 µm<br />
M<br />
www.<strong>LMT</strong>-tools.de<br />
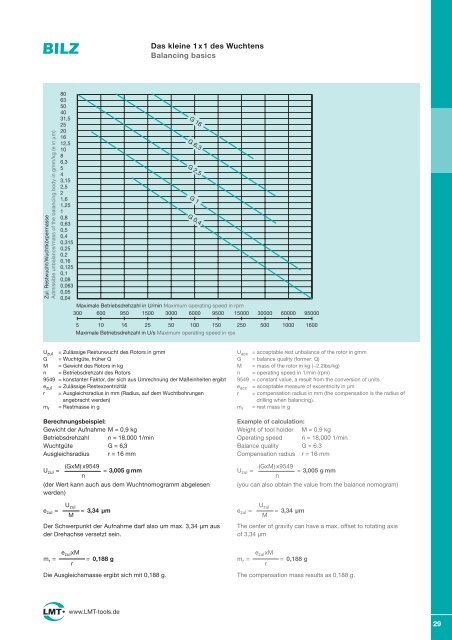
Das kleine 1x1 des Wuchtens<br />
Balancing basics<br />
G 16<br />
G 6,3<br />
G 2,5<br />
G 1<br />
G 0,4<br />
Maximale Betriebsdrehzahl in U/min Maximum operating speed in rpm<br />
300 600 950 1500 3000 6000 9500 15000 30000 60000 95000<br />
5 10 16 25 50 100 150 250 500 1000 1600<br />
Maximale Betriebsdrehzahl in U/s Maximum operating speed in rps<br />
Uzul = Zulässige Restunwucht des Rotors in gmm<br />
G = Wuchtgüte, früher Q<br />
M = Gewicht des Rotors in kg<br />
n = Betriebsdrehzahl des Rotors<br />
9549 = konstanter Faktor, <strong>der</strong> sich aus Umrechnung <strong>der</strong> Maßeinheiten ergibt<br />
ezul = Zulässige Restexzentrizität<br />
r = Ausgleichsradius in mm (Radius, auf dem Wuchtbohrungen<br />
angebracht werden)<br />
mr = Restmasse in g<br />
Berechnungsbeispiel:<br />
Gewicht <strong>der</strong> Aufnahme M = 0,9 kg<br />
Betriebsdrehzahl n = 18.000 1/min<br />
Wuchtgüte G = 6,3<br />
Ausgleichsradius r = 16 mm<br />
(GxM) x9549<br />
Uzul = = 3,005 g mm<br />
n<br />
(<strong>der</strong> Wert kann auch aus dem Wuchtnomogramm abgelesen<br />
werden)<br />
Der Schwerpunkt <strong>der</strong> Aufnahme darf also um max. 3,34 µm aus<br />
<strong>der</strong> Drehachse versetzt sein.<br />
ezulxM mr = = 0,188 g<br />
r<br />
Die Ausgleichsmasse ergibt sich mit 0,188 g.<br />
Uacc = acceptable rest unbalance of the rotor in gmm<br />
G = balance quality (former: Q)<br />
M = mass of the rotor in kg (~2.2lbs/kg)<br />
n = operating speed in 1/min (rpm)<br />
9549 = constant value, a result from the conversion of units<br />
eacc = acceptable measure of excentricity in µm<br />
r = compensation radius in mm (the compensation is the radius of<br />
drilling when balancing).<br />
mr = rest mass in g<br />
Example of calculation:<br />
Weight of tool hol<strong>der</strong> M = 0,9 kg<br />
Operating speed n = 18,000 1/min<br />
Balance quality G = 6.3<br />
Compensation radius r = 16 mm<br />
(GxM) x9549<br />
Uzul = = 3,005 g mm<br />
n<br />
(you can also obtain the value from the balance nomogram)<br />
Uzul ezul = = 3,34 µm<br />
M<br />
The center of gravity can have a max. offset to rotating axis<br />
of 3,34 µm<br />
ezulxM mr = = 0,188 g<br />
r<br />
The compensation mass results as 0,188 g.<br />
29