Roku Object Reference - imaginArt
Roku Object Reference - imaginArt
Roku Object Reference - imaginArt

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
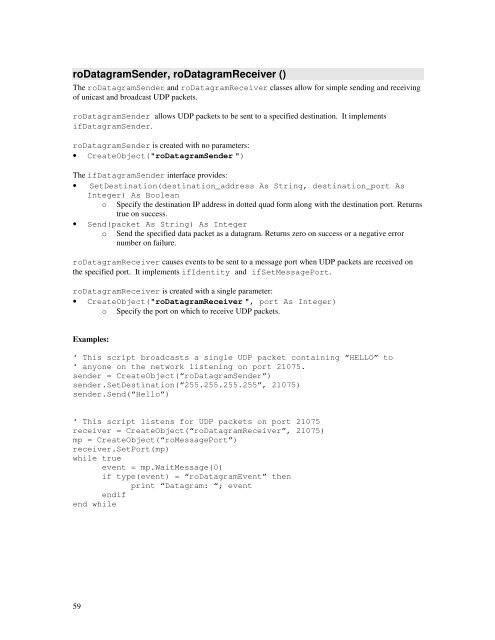
oDatagramSender, roDatagramReceiver ()<br />
The roDatagramSender and roDatagramReceiver classes allow for simple sending and receiving<br />
of unicast and broadcast UDP packets.<br />
roDatagramSender allows UDP packets to be sent to a specified destination. It implements<br />
ifDatagramSender.<br />
roDatagramSender is created with no parameters:<br />
• Create<strong>Object</strong>("roDatagramSender ")<br />
The ifDatagramSender interface provides:<br />
• SetDestination(destination_address As String, destination_port As<br />
Integer) As Boolean<br />
o Specify the destination IP address in dotted quad form along with the destination port. Returns<br />
true on success.<br />
• Send(packet As String) As Integer<br />
o Send the specified data packet as a datagram. Returns zero on success or a negative error<br />
number on failure.<br />
roDatagramReceiver causes events to be sent to a message port when UDP packets are received on<br />
the specified port. It implements ifIdentity and ifSetMessagePort.<br />
roDatagramReceiver is created with a single parameter:<br />
• Create<strong>Object</strong>("roDatagramReceiver ", port As Integer)<br />
o Specify the port on which to receive UDP packets.<br />
Examples:<br />
‘ This script broadcasts a single UDP packet containing “HELLO” to<br />
‘ anyone on the network listening on port 21075.<br />
sender = Create<strong>Object</strong>(“roDatagramSender”)<br />
sender.SetDestination(“255.255.255.255”, 21075)<br />
sender.Send(“Hello”)<br />
‘ This script listens for UDP packets on port 21075<br />
receiver = Create<strong>Object</strong>(“roDatagramReceiver”, 21075)<br />
mp = Create<strong>Object</strong>(“roMessagePort”)<br />
receiver.SetPort(mp)<br />
while true<br />
event = mp.WaitMessage(0)<br />
if type(event) = “roDatagramEvent” then<br />
print “Datagram: “; event<br />
endif<br />
end while<br />
59