Part II - IPA SA
Part II - IPA SA
Part II - IPA SA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
48 REVISTA ROMÂN DE AUTOMATIC<br />
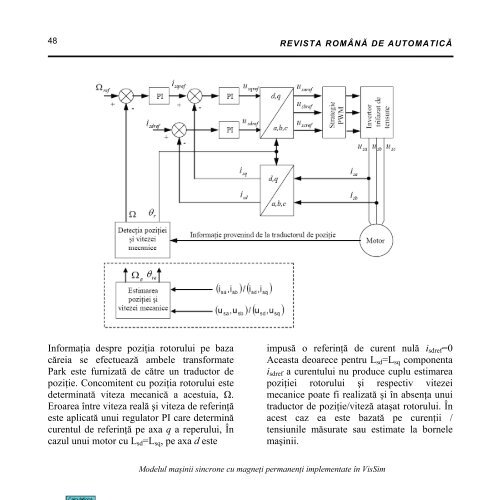
Informaia despre poziia rotorului pe baza<br />
creia se efectueaz ambele transformate<br />
Park este furnizat de ctre un traductor de<br />
poziie. Concomitent cu poziia rotorului este<br />
determinat viteza mecanic a acestuia, .<br />
Eroarea între viteza real i viteza de referin<br />
este aplicat unui regulator PI care determin<br />
curentul de referin pe axa q a reperului, În<br />
cazul unui motor cu L sd =L sq , pe axa d este<br />
impus o referin de curent nul i sdref =0<br />
Aceasta deoarece pentru L sd =L sq componenta<br />
i sdref a curentului nu produce cuplu estimarea<br />
poziiei rotorului i respectiv vitezei<br />
mecanice poate fi realizat i în absena unui<br />
traductor de poziie/vitez ataat rotorului. În<br />
acest caz ea este bazat pe curenii /<br />
tensiunile msurate sau estimate la bornele<br />
mainii.<br />
Modelul mainii sincrone cu magnei permaneni implementate în VisSim