

Cost-Based Optimization of Integration Flows - Datenbanken ...
Cost-Based Optimization of Integration Flows - Datenbanken ...
Cost-Based Optimization of Integration Flows - Datenbanken ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6 On-Demand Re-<strong>Optimization</strong><br />
o 3 o 4<br />
o 2 o 3<br />
(a) Partial POT 1<br />
|ds in1| |ds out1| |ds in1| |ds out1| |ds in1| |ds out1| |ds in1| |ds out1|<br />
sel(o2)<br />
sel(o3)<br />
sel(o3)<br />
sel(o4)<br />
≤<br />
≤<br />
o 2 o 3<br />
|ds in1| |ds out1| |ds in1| |ds out1|<br />
sel(o2)<br />
sel(o3)<br />
≤<br />
≤<br />
(b) Partial POT 2 (c) Merged POT<br />
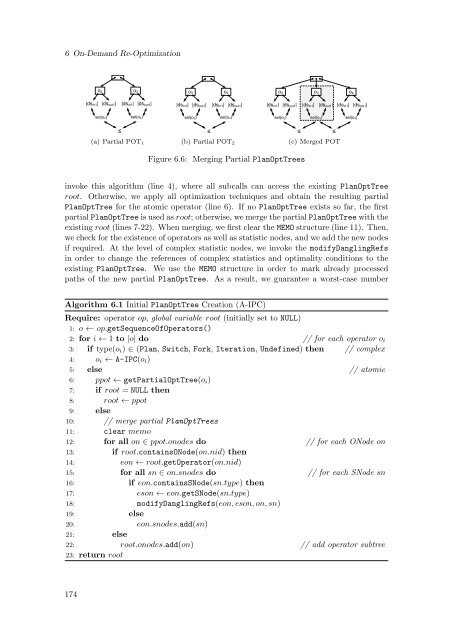
Figure 6.6: Merging Partial PlanOptTrees<br />
o 4<br />
|ds in1| |ds out1|<br />
sel(o4)<br />
invoke this algorithm (line 4), where all subcalls can access the existing PlanOptTree<br />
root. Otherwise, we apply all optimization techniques and obtain the resulting partial<br />
PlanOptTree for the atomic operator (line 6). If no PlanOptTree exists so far, the first<br />
partial PlanOptTree is used as root; otherwise, we merge the partial PlanOptTree with the<br />
existing root (lines 7-22). When merging, we first clear the MEMO structure (line 11). Then,<br />
we check for the existence <strong>of</strong> operators as well as statistic nodes, and we add the new nodes<br />
if required. At the level <strong>of</strong> complex statistic nodes, we invoke the modifyDanglingRefs<br />
in order to change the references <strong>of</strong> complex statistics and optimality conditions to the<br />
existing PlanOptTree. We use the MEMO structure in order to mark already processed<br />
paths <strong>of</strong> the new partial PlanOptTree. As a result, we guarantee a worst-case number<br />
Algorithm 6.1 Initial PlanOptTree Creation (A-IPC)<br />
Require: operator op, global variable root (initially set to NULL)<br />
1: o ← op.getSequenceOfOperators()<br />
2: for i ← 1 to |o| do // for each operator o i<br />
3: if type(o i ) ∈ (Plan, Switch, Fork, Iteration, Undefined) then // complex<br />
4: o i ← A-IPC(o i )<br />
5: else // atomic<br />
6: ppot ← getPartialOptTree(o i )<br />
7: if root = NULL then<br />
8: root ← ppot<br />
9: else<br />
10: // merge partial PlanOptTrees<br />
11: clear memo<br />
12: for all on ∈ ppot.onodes do // for each ONode on<br />
13: if root.containsONode(on.nid) then<br />
14: eon ← root.getOperator(on.nid)<br />
15: for all sn ∈ on.snodes do // for each SNode sn<br />
16: if eon.containsSNode(sn.type) then<br />
17: eson ← eon.getSNode(sn.type)<br />
18: modifyDanglingRefs(eon, eson, on, sn)<br />
19: else<br />
20: eon.snodes.add(sn)<br />
21: else<br />
22: root.onodes.add(on) // add operator subtree<br />
23: return root<br />
174








