Fusion FH-100 and FHR-100 - Vinten Radamec
Fusion FH-100 and FHR-100 - Vinten Radamec
Fusion FH-100 and FHR-100 - Vinten Radamec

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
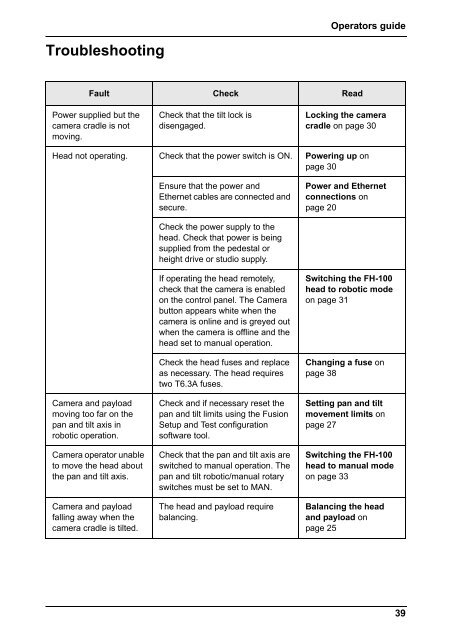
Troubleshooting<br />
Fault Check Read<br />
Power supplied but the<br />
camera cradle is not<br />
moving.<br />
Check that the tilt lock is<br />
disengaged.<br />
Operators guide<br />
Locking the camera<br />
cradle on page 30<br />
Head not operating. Check that the power switch is ON. Powering up on<br />
page 30<br />
Camera <strong>and</strong> payload<br />
moving too far on the<br />
pan <strong>and</strong> tilt axis in<br />
robotic operation.<br />
Camera operator unable<br />
to move the head about<br />
the pan <strong>and</strong> tilt axis.<br />
Camera <strong>and</strong> payload<br />
falling away when the<br />
camera cradle is tilted.<br />
Ensure that the power <strong>and</strong><br />
Ethernet cables are connected <strong>and</strong><br />
secure.<br />
Check the power supply to the<br />
head. Check that power is being<br />
supplied from the pedestal or<br />
height drive or studio supply.<br />
If operating the head remotely,<br />
check that the camera is enabled<br />
on the control panel. The Camera<br />
button appears white when the<br />
camera is online <strong>and</strong> is greyed out<br />
when the camera is offline <strong>and</strong> the<br />
head set to manual operation.<br />
Check the head fuses <strong>and</strong> replace<br />
as necessary. The head requires<br />
two T6.3A fuses.<br />
Check <strong>and</strong> if necessary reset the<br />
pan <strong>and</strong> tilt limits using the <strong>Fusion</strong><br />
Setup <strong>and</strong> Test configuration<br />
software tool.<br />
Check that the pan <strong>and</strong> tilt axis are<br />
switched to manual operation. The<br />
pan <strong>and</strong> tilt robotic/manual rotary<br />
switches must be set to MAN.<br />
The head <strong>and</strong> payload require<br />
balancing.<br />
Power <strong>and</strong> Ethernet<br />
connections on<br />
page 20<br />
Switching the <strong>FH</strong>-<strong>100</strong><br />
head to robotic mode<br />
on page 31<br />
Changing a fuse on<br />
page 38<br />
Setting pan <strong>and</strong> tilt<br />
movement limits on<br />
page 27<br />
Switching the <strong>FH</strong>-<strong>100</strong><br />
head to manual mode<br />
on page 33<br />
Balancing the head<br />
<strong>and</strong> payload on<br />
page 25<br />
39