

Usability of Digital Cameras for Verifying Physically Based ...
Usability of Digital Cameras for Verifying Physically Based ...
Usability of Digital Cameras for Verifying Physically Based ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
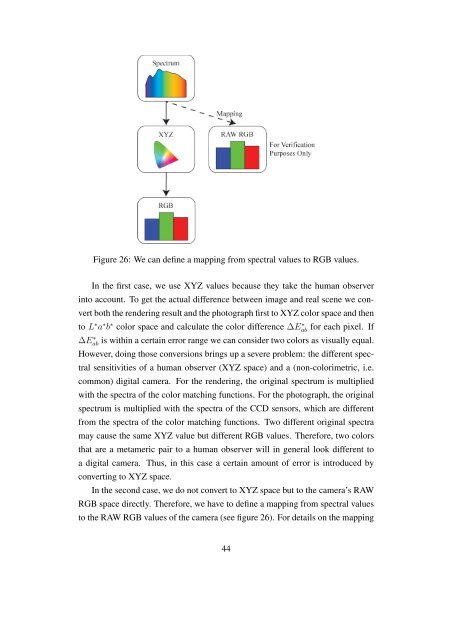
Figure 26: We can define a mapping from spectral values to RGB values.<br />
In the first case, we use XYZ values because they take the human observer<br />
into account. To get the actual difference between image and real scene we con-<br />
vert both the rendering result and the photograph first to XYZ color space and then<br />
to L∗a∗b∗ color space and calculate the color difference ∆E∗ ab <strong>for</strong> each pixel. If<br />
is within a certain error range we can consider two colors as visually equal.<br />
∆E ∗ ab<br />
However, doing those conversions brings up a severe problem: the different spec-<br />
tral sensitivities <strong>of</strong> a human observer (XYZ space) and a (non-colorimetric, i.e.<br />
common) digital camera. For the rendering, the original spectrum is multiplied<br />
with the spectra <strong>of</strong> the color matching functions. For the photograph, the original<br />
spectrum is multiplied with the spectra <strong>of</strong> the CCD sensors, which are different<br />
from the spectra <strong>of</strong> the color matching functions. Two different original spectra<br />
may cause the same XYZ value but different RGB values. There<strong>for</strong>e, two colors<br />
that are a metameric pair to a human observer will in general look different to<br />
a digital camera. Thus, in this case a certain amount <strong>of</strong> error is introduced by<br />
converting to XYZ space.<br />
In the second case, we do not convert to XYZ space but to the camera’s RAW<br />
RGB space directly. There<strong>for</strong>e, we have to define a mapping from spectral values<br />
to the RAW RGB values <strong>of</strong> the camera (see figure 26). For details on the mapping<br />
44














