Notas de Topolog´ıa Clara M. Neira U. - UN Virtual
Notas de Topolog´ıa Clara M. Neira U. - UN Virtual
Notas de Topolog´ıa Clara M. Neira U. - UN Virtual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Notas</strong> <strong>de</strong> Topología<strong>Clara</strong> M. <strong>Neira</strong> U.22 <strong>de</strong> octubre <strong>de</strong> 2003
Capítulo 0Teoría <strong>de</strong> ConjuntosEn esta sección se presentan muy brevemente conceptos básicos<strong>de</strong> la Teoría <strong>de</strong> Conjuntos así como la notación que se utilizará ena<strong>de</strong>lante. Suponemos al lector familiarizado con estas <strong>de</strong>finicionesy resultados por lo cual no incluiremos <strong>de</strong>mostraciones.0.1. Definiciones básicasAsumimos que el significado <strong>de</strong> la palabra “conjunto”es intuitivamenteclaro y, como es costumbre, utilizaremos preferiblementeletras mayúsculas A, B, ... para <strong>de</strong>notar los conjuntosy letras minúsculas a, b, ... para <strong>de</strong>notar los elementos <strong>de</strong> unconjunto.Si a y b son elementos distintos, escribiremos a ≠ b y con A ≠ Bestamos indicando que A y B son conjuntos distintos.Si un elemento a pertenece al conjunto A utilizaremos la notacióna ∈ A y si <strong>de</strong>seamos expresar que a no es un elemento<strong>de</strong>l conjunto A escribiremos a /∈ A. Para indicar que todos los1
elementos <strong>de</strong>l conjunto A pertenecen también al conjunto B, estoes que que A es un subconjunto <strong>de</strong> B o que el conjunto Aestá contenido en B, escribiremos A ⊂ B y si <strong>de</strong>seamos especificarque, aunque A es un subconjunto <strong>de</strong> B, existen elementos<strong>de</strong> B que no pertenecen a A, escribiremos A B. En este casodiremos que A es un subconjunto propio <strong>de</strong> B. Como es natural,si A ⊂ B y B ⊂ A entonces A y B tienen los mismos elementosy escribiremos A = B.Para <strong>de</strong>scribir un conjunto po<strong>de</strong>mos listar <strong>de</strong> manera explícitasus elementos como cuando escribimos A = {2, 3, 5, 7}, o indicaruna propiedad que los caracterice, como cuando utilizamosla notaciónA = {x : x es un número primo menor que 10}o equivalentementeA = {x|x es un número primo menor que 10}.Denotamos con el símbolo ∅ al conjunto vacío y afirmamos que∅ ⊂ X para todo conjunto X.Si X es un conjunto cualquiera, la colección <strong>de</strong> todos los subconjuntos<strong>de</strong> X es un conjunto que <strong>de</strong>notamos con el símboloP(X) y llamamos el conjunto “partes <strong>de</strong> X”.2
0.2. Unión, intersección y diferencia <strong>de</strong> conjuntosSi A y B son conjuntos entoncesla unión <strong>de</strong> A y B,que <strong>de</strong>notamos A ∪ B es elconjunto formado por los elementosque pertenecen a A opertenecen a B. Es <strong>de</strong>cirA∪B = {x : x ∈ A o x ∈ B}.Si A y B son conjuntos entoncesla intersección <strong>de</strong> A yB, que <strong>de</strong>notamos A∩B, es elconjunto formado por los elementosque pertenecen a A ysimultáneamente pertenecena B. Es <strong>de</strong>cirA∩B = {x : x ∈ A y x ∈ B}.Si A ∩ B = ∅ <strong>de</strong>cimos que A y B son disyuntos.De las <strong>de</strong>finiciones se concluye que A ⊂ A ∪ B, B ⊂ A ∪ B,A ∩ B ⊂ A y A ∩ B ⊂ B.3
A<strong>de</strong>más se satisfacen las siguientes propieda<strong>de</strong>s:1. A ∪ A = A y A ∩ A = A para cada conjunto A.2. A ∪ ∅ = A y A ∩ ∅ = ∅ para cada conjunto A.3. A ∪ B = B ∪ A y A ∩ B = B ∩ A para todo conjunto A ytodo conjunto B.4. A ∪ B = A si y sólo si B ⊂ A.5. A ∩ B = A si y sólo si A ⊂ B.6. A ∪ (B ∪ C) = (A ∪ B) ∪ C para A, B y C conjuntosarbitrarios.7. A ∩ (B ∩ C) = (A ∩ B) ∩ C para A, B y C conjuntosarbitrarios.8. A ∪ (B ∩ C) = (A ∪ B) ∩ (A ∪ C) para A, B y C conjuntosarbitrarios.9. A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ C) para A, B y C conjuntosarbitrarios.La siguiente operación que mencionaremos es la diferencia <strong>de</strong>conjuntos.4
Si A y B son conjuntos entoncesla diferencia AB es elconjunto formado por los elementosque pertenecen a A yno pertenecen a B. Es <strong>de</strong>cirA B = {x ∈ A : x /∈ B}.Si estamos trabajando con subconjuntos <strong>de</strong> un conjunto fijo Xy A ⊂ X nos referiremos a X A como el complemento <strong>de</strong> Aen X y lo <strong>de</strong>notaremos también con A c o con ∁A.Las siguientes propieda<strong>de</strong>s se conocen con el nombre <strong>de</strong> Leyes<strong>de</strong> De Morgan y resultan <strong>de</strong> gran utilidad en el trabajo conconjuntos.1. Si A y B son subconjuntos <strong>de</strong> X entonces (A ∪ B) c =A c ∩ B c .2. Si A y B son subconjuntos <strong>de</strong> X entonces (A ∩ B) c =A c ∪ B c .Ejercicios5
0.3. Uniones e intersecciones arbitrariasAsí como es posible conseguir un nuevo conjunto uniendo o intersectandodos conjuntos dados, es posible formar nuevos conjuntosconstruyendo la unión o la intersección <strong>de</strong> una colecciónarbitraria <strong>de</strong> conjuntos o dicho <strong>de</strong> otra manera, <strong>de</strong> una familiaarbitraria <strong>de</strong> conjuntos.Dada una colección A <strong>de</strong> conjuntos <strong>de</strong>finimos la unión <strong>de</strong> lacolección como el conjunto⋃A = {x : x ∈ A para algún A ∈ A}A∈Ay la intersección <strong>de</strong> la colección como el conjunto⋂A = {x : x ∈ A para cada A ∈ A}.A∈ASi la colección A es vacía ningún elemento x satisface la condiciónnecesaria para po<strong>de</strong>r afirmar que pertenece a ⋃ A∈AA. Entonces⋃ A∈A A = ∅. Pero la expresión ⋂ A∈AA sólo tiene sentidosi estamos pensando en un conjunto X que sea todo nuestro“universo”. De ser así, cada elemento x ∈ X pertenece a ⋂ A∈A Aporque <strong>de</strong> lo contrario existiría A ∈ A = ∅ tal que x ∈ A, locual es absurdo. Entonces ⋂ A∈A A = X.Si A es una colección <strong>de</strong> subconjuntos <strong>de</strong> un conjunto X entonceslas Leyes <strong>de</strong> De Morgan tienen la siguiente presentación:1.2.(⋃A∈A A) c=⋂A∈A Ac .(⋂A∈A A) c=⋃A∈A Ac .Ejercicios6
0.4. Producto cartesianoAntes <strong>de</strong> dar la <strong>de</strong>finición precisa <strong>de</strong>l producto cartesiano <strong>de</strong>dos conjuntos nos referiremos brevemente al concepto <strong>de</strong> parejaor<strong>de</strong>nada. Rigurosamente hablando la pareja or<strong>de</strong>nada (a, b) esel conjunto {{a}, {a, b}}. La primera coor<strong>de</strong>nada <strong>de</strong> la parejaes el elemento que aparece en los dos conjuntos que la <strong>de</strong>fineny la segunda coor<strong>de</strong>nada es el elemento que aparece sólo en uno<strong>de</strong> los conjuntos. Si a = b entonces la pareja (a, b) se reduce alconjunto {{a}} y en este caso la primera coor<strong>de</strong>nada es igual ala segunda.Sean X y Y dos conjuntos. El producto cartesiano X × Y es elconjunto <strong>de</strong> parejas or<strong>de</strong>nadas que tienen como primera coor<strong>de</strong>nadaun elemento <strong>de</strong> X y como segunda coor<strong>de</strong>nada un elemento<strong>de</strong> Y . Esto es:X × Y = {(x, y) : x ∈ X y y ∈ Y }.De la <strong>de</strong>finición se tiene que si X y Y son conjuntos entoncesX × ∅ = ∅ × Y = ∅ y que, en general, X × Y ≠ Y × X.Ejercicios0.5. FuncionesSean X y Y conjuntos. Una función (o aplicación) f <strong>de</strong> X en Yque <strong>de</strong>notamos por f : X −→ Y es un subconjunto <strong>de</strong> X × Ytal que:7
1. Para cada x ∈ X existe y ∈ Y tal que (x, y) ∈ f.2. Si (x, y) ∈ f y (x, z) ∈ f entonces y = z.La relación (x, y) ∈ f se suele simbolizar por y = f(x) y f(x)se acostumbra llamar la imagen <strong>de</strong> x por la función f. Tambiénutilizaremos la notación x ↦−→ f(x) para indicar que (x, f(x)) ∈f. Informalmente hablando, una función <strong>de</strong> un conjunto X enun conjunto Y se pue<strong>de</strong> <strong>de</strong>scribir dando una regla que permitacalcular f(x) para cada x ∈ X, como cuando se estudia cálculoy se <strong>de</strong>scribe una función <strong>de</strong> R 2 en R por medio <strong>de</strong> la expresiónf(x, y) =1x 2 + y 2 + 1 .Si f : X −→ Y es una función entonces el conjunto X se llamael dominio <strong>de</strong> f, el conjunto Y es el codominio <strong>de</strong> f y el subconjunto<strong>de</strong> Y cuyos elementos son las imágenes <strong>de</strong> los elementos<strong>de</strong> X, esto es el conjunto {f(x) : x ∈ X}, es el rango <strong>de</strong> f.Denotamos por Dom f el dominio <strong>de</strong> f, por Cod f el codominio<strong>de</strong> f y por Ran f el rango <strong>de</strong> la función f.Si f : X −→ Y es una función y A ⊂ X, existe una función condominio A, que llamamos la restricción <strong>de</strong> f al conjunto A y<strong>de</strong>notamos f ↾ A , <strong>de</strong>finida por f ↾ A (a) = f(a) para cada a ∈ A.De manera análoga, si f(X) ⊂ B ⊂ Y , entonces po<strong>de</strong>mos consi<strong>de</strong>rarla co-restricción <strong>de</strong> f a B que es una función que actúa<strong>de</strong> la misma forma que f sobre los elementos <strong>de</strong> X, pero tienecomo codominio el conjunto B. No utilizaremos una notaciónespecial para la co-restricción <strong>de</strong> una función.Una función f <strong>de</strong>finida <strong>de</strong> un conjunto X en un conjunto Y<strong>de</strong>termina <strong>de</strong> manera natural dos aplicaciones. La primera, quese acostumbra <strong>de</strong>notar por el mismo símbolo f, con dominioP(X) y codominio P(Y ) se <strong>de</strong>nomina imagen directa y aplica al8
subconjunto A <strong>de</strong> X en el subconjunto <strong>de</strong> Y f(A) = {f(x) : x ∈A}. La segunda aplicación que se <strong>de</strong>nomina imagen recíproca yse <strong>de</strong>nota por f −1 , está <strong>de</strong>finida <strong>de</strong> P(Y ) en P(X) por f −1 (B) ={x ∈ X : f(x) ∈ B}. Por simplicidad, para y ∈ Y escribimosf −1 (y) en lugar <strong>de</strong> f −1 ({y}).Decimos que una función f : X −→ Y es uno a uno o inyectivasi f(x) ≠ f(y) siempre que x sea diferente <strong>de</strong> y, sobreyectiva (osimplemente sobre) si f(X) = Y y biyectiva si es uno a uno ysobre.Nótese que una función f : X −→ Y es uno a uno si y sólo sif −1 (f(A)) = A para todo A ⊂ X y que f es sobreyectiva si ysólo si f(f −1 (B)) = B para todo B ⊂ Y .Si f : X −→ Y es una función biyectiva, existe una función<strong>de</strong> Y en X que se llama la inversa <strong>de</strong> f y se <strong>de</strong>nota por f −1<strong>de</strong>finida por f −1 (y) = x si y sólo si f(x) = y. El hecho <strong>de</strong> que fsea sobreyectiva garantiza la existencia <strong>de</strong> x = f −1 (y) para caday ∈ Y y el que f sea uno a uno garantiza que tal x es único.Si f : X −→ Y y g : Y −→ Z son funciones entonces la funcióncompuesta g ◦ f : X −→ Z está <strong>de</strong>finida por g ◦ f(x) = g(f(x)).Formalmente hablando, (x, z) ∈ g ◦ f si y sólo si existe y ∈ Ytal que (x, y) ∈ f y (y, z) ∈ g.Ejercicios9
0.6. Productos arbitrariosHasta ahora nos hemos referido únicamente al producto cartesiano<strong>de</strong> dos conjuntos. En realidad estudiar este producto nospermite <strong>de</strong> manera inmediata <strong>de</strong>finir el producto cartesiano <strong>de</strong>una colección finita <strong>de</strong> conjuntos. En efecto, si X 1 , X 2 , ..., X nes una colección <strong>de</strong> conjuntos entonces el producto cartesianoX 1 × X 2 × ... × X n , que también <strong>de</strong>notaremos por ∏ i=1,...,n X i,se <strong>de</strong>fine como el conjunto <strong>de</strong> n-tuplas{(x 1 , x 2 , ..., x n ) : x i ∈ X i para cada i = 1, ..., n}.El ejemplo más inmediato y seguramente conocido por todos esel conjunto R n = {(x 1 , x 2 , ..., x n ) : x i ∈ R}. En este caso todoslos factores <strong>de</strong>l producto son iguales al conjunto <strong>de</strong> los númerosreales.Un análisis un poco más <strong>de</strong>tallado nos muestra que en realidadcada elemento x = (x 1 , x 2 , ..., x n ) <strong>de</strong>l producto cartesianoX 1 × X 2 × ... × X n es una función <strong>de</strong>l conjunto {1, 2, ..., n}en el conjunto ⋃ i=1,...,n X i, <strong>de</strong>finida por x(i) = x i para cadai = 1, ..., n.Este hecho, que podría parecer una complicación innecesaria,permite generalizar la noción <strong>de</strong> producto cartesiano a familiasarbitrarias <strong>de</strong> conjuntos como lo muestra la siguiente <strong>de</strong>finición.0.6.1 Definición. Sea {X j } j∈J una familia <strong>de</strong> conjuntos. Elproducto cartesiano <strong>de</strong> esta familia se <strong>de</strong>nota por ∏ j∈J X j y esel conjunto <strong>de</strong> todas las funciones x : J −→ ⋃ j∈J X j tales quex(j) ∈ X j para cada j ∈ J.10
Con frecuencia utilizamos x j para <strong>de</strong>notar a x(j) y <strong>de</strong>notamosal elemento x ∈ ∏ j∈J X j por (x j ).0.6.2 Ejemplos.1. Si J = N entonces los elementos <strong>de</strong>l producto ∏ n∈N X n sepue<strong>de</strong>n escribir como una sucesión (x 1 , x 2 , ...) don<strong>de</strong> x n ∈X n para cada n ∈ N.2. Si X j = X para cada j ∈ J, entonces ∏ j∈J X j es el conjunto<strong>de</strong> todas las funciones <strong>de</strong>finidas <strong>de</strong> J en X. Denotamospor X J a este conjunto.3. Si X j ⊂ Y j para cada j ∈ J entonces ∏ j∈J X j ⊂ ∏ j∈J Y j.Ejercicios0.7. RelacionesUna relación sobre un conjunto X (o en un conjunto X) esun subconjunto R <strong>de</strong>l producto cartesiano X × X. Si (x, y) ∈ Rescribimos x R y. Nótese que una función <strong>de</strong>finida <strong>de</strong> un conjuntoX en sí mismo es una relación f en X en la que cada elemento<strong>de</strong> X aparece como la primera coor<strong>de</strong>nada <strong>de</strong> un elemento <strong>de</strong>f exactamente una vez. En este sentido las relaciones son unageneralización <strong>de</strong> las funciones.Una relación <strong>de</strong> equivalencia sobre un conjunto X es una relación∼ en X que satisface las siguientes propieda<strong>de</strong>s:11
1. (Reflexividad) x ∼ x para todo x ∈ X.2. (Simetría) Si x ∼ y, entonces y ∼ x.3. (Transitividad) Si x ∼ y y y ∼ z, entonces x ∼ z.Dada una relación <strong>de</strong> equivalencia ∼ sobre un conjunto X y unelemento x ∈ X <strong>de</strong>finimos la clase <strong>de</strong> equivalencia <strong>de</strong> x como elconjunto [x] = {y ∈ X : x ∼ y}. De la <strong>de</strong>finición se obtiene quex ∈ [x] para cada x ∈ X lo cual significa que ⋃ x∈X [x] = X ytambién que dadas dos clases <strong>de</strong> equivalencia [x] y [y], se tieneque [x] = [y] o [x]∩[y] = ∅. Expresamos estos dos hechos diciendoque la relación ∼ induce una partición <strong>de</strong> X.Formalmente, una partición <strong>de</strong> un conjunto X es una colección<strong>de</strong> subconjuntos disyuntos <strong>de</strong> X cuya unión es X.Una relación <strong>de</strong> or<strong>de</strong>n parcial sobre un conjunto X es una relación≤ en X que satisface las siguientes propieda<strong>de</strong>s:1. (Reflexividad) x ≤ x para todo x ∈ X.2. (Antisimetría) Si x ≤ y y y ≤ x, entonces x = y.3. (Transitividad) Si x ≤ y y y ≤ z, entonces x ≤ z.Si ≤ es una relación <strong>de</strong> or<strong>de</strong>n parcial sobre un conjunto X existeuna relación < sobre X <strong>de</strong>finida por x < y si x ≤ y y x ≠ y.La relación < no es reflexiva pero si transitiva. Una relacióntransitiva < sobre un conjunto X que a<strong>de</strong>más tenga la propiedad<strong>de</strong> que si x < y entonces x ≠ y se llama un or<strong>de</strong>n estricto.Entonces cada relación <strong>de</strong> or<strong>de</strong>n parcial <strong>de</strong>termina un or<strong>de</strong>nestricto y, recíprocamente, un or<strong>de</strong>n estricto < <strong>de</strong>termina unor<strong>de</strong>n parcial ≤ <strong>de</strong>finido por x ≤ y si x < y o x = y.12
Una relación <strong>de</strong> or<strong>de</strong>n parcial ≤ sobre un conjunto X es unor<strong>de</strong>n total si para cada par x, y <strong>de</strong> elementos <strong>de</strong> X se tieneexactamente una <strong>de</strong> las situaciones x = y, x < y o y < x. Eneste caso <strong>de</strong>cimos que el conjunto X está totalmente or<strong>de</strong>nado.Ejercicios0.8. CardinalidadDecimos que dos conjuntos X y Y son equipotentes si existe unafunción biyectiva <strong>de</strong> X en Y . Afirmamos que existen conjuntosque se llaman números cardinales, <strong>de</strong> tal manera que cadaconjunto X es equipotente con exactamente un número cardinalque se <strong>de</strong>nota por |X| y recibe el nombre <strong>de</strong> cardinal <strong>de</strong> X.Si A y B son números cardinales, <strong>de</strong>cimos que A ≤ B si y sólosi existe una función uno a uno <strong>de</strong>finida <strong>de</strong> X en Y . La relación≤ es un or<strong>de</strong>n parcial sobre el conjunto <strong>de</strong> números cardinales.Los siguientes hechos son evi<strong>de</strong>ntes:1. |X| = |Y | si y sólo si X y Y son equipotentes.2. |X| ≤ |Y | si y sólo si X es equipotente con algún subconjunto<strong>de</strong> Y .Veamos ahora algunos números cardinales. El conjunto vacío esel cardinal 0 y el conjunto {0, ..., n − 1} es el cardinal n. Unconjunto X es enumerable si y sólo si X es equipotente con elconjunto N <strong>de</strong> los números naturales. En este caso escibimos13
|X| = ℵ 0 . Si X es equipotente con el conjunto R <strong>de</strong> los númerosreales, escribimos |X| = c. Un conjunto X es contable si esenumerable o su cardinal es n para algún n = 0, 1, ..., esto es, Xes contable si es enumerable o es finito.Con frecuencia utilizaremos los siguientes hechos:1. n < ℵ 0 < c para todo n = 0, 1, ....2. La unión <strong>de</strong> cualquier colección contable <strong>de</strong> conjuntos contableses contable.3. El producto <strong>de</strong> dos conjuntos contables es un conjunto contable4. El conjunto Q <strong>de</strong> los números racionales es contable.Finalizamos esta breve introducción a la teoría <strong>de</strong> conjuntosenunciando un axioma aceptado por la gran mayoría <strong>de</strong> matemáticos.Axioma <strong>de</strong> Elección. Dada una colección A <strong>de</strong> conjuntos novacíos disyuntos dos a dos, existe un conjunto C que tiene exactamenteun elemento en común con cada elemento <strong>de</strong> A.El Axioma <strong>de</strong> Elección nos dice que cuando tenemos una colección<strong>de</strong> conjuntos no vacíos, nos es posible construir un nuevoconjunto escogiendo un elemento <strong>de</strong> cada conjunto <strong>de</strong> la colección.Ejercicios14
Capítulo 1Espacios Métricos1.1. Métricas y seudométricas1.1.1 Definición. Sea X un conjunto. Una métrica sobre Xes una función ρ : X × X −→ R tal que:1. ρ(x, y) ≥ 0,2. ρ(x, y) = 0 si y sólo si x = y,3. ρ(x, y) = ρ(y, x) y4. ρ(x, y) ≤ ρ(x, z) + ρ(z, y) (<strong>de</strong>sigualdad triangular)para todo x, y, z ∈ X. Si ρ es una métrica sobre X <strong>de</strong>cimosque (X, ρ), o simplemente X, si no hay lugar a confusión sobrela métrica con la que se trabaja, es un espacio métrico.1.1.2 Ejemplos.1. Si X es un conjunto cualquiera, la función ρ : X ×X −→ R15
eal M > 0 tal que |f(x)| < M para todo x ∈ R). La funciónρ : X × X −→ R <strong>de</strong>finida por ρ(f, g) = sup{|f(x) − g(x)| :x ∈ R} es una métrica sobre X.6. Sea C(I) el conjunto <strong>de</strong> todas las funciones continuas <strong>de</strong>finidas<strong>de</strong>l intervalo I = [0, 1] en R. La función ρ : C(I)×C(I) −→R <strong>de</strong>finida por ρ(f, g) = ∫ 10|f(x) − g(x)|dx es una métricasobre C(I).7. Cualquier subconjunto Y <strong>de</strong> un espacio métrico (X, d) esun espacio métrico con la restricción d ↾ Y ×Y <strong>de</strong> la funciónd a Y × Y .8. Si X = {x 1 , x 2 , ...} es un conjunto contable, entonces lafunción d : X × X −→ R <strong>de</strong>finida por⎧⎨1 + 1 si i ≠ jd(x i , x j ) = i + j⎩0 si i = jes una métrica sobre X. El espacio (X, d) se llama el EspacioMétrico <strong>de</strong> Sierpinski y d se llama la métrica <strong>de</strong> Sierpinski.En un espacio métrico, a<strong>de</strong>más <strong>de</strong> medir la distancia entre dospuntos, es posible medir la distancia entre un punto y un conjunto.1.1.3 Definición. Sea (X, d) un espacio métrico. Si A es unsubconjunto no vacío <strong>de</strong> X entonces la distancia d(x, A) <strong>de</strong> unpunto x ∈ X al conjunto A se <strong>de</strong>fine como el ínfimo <strong>de</strong> losnúmeros d(x, a) don<strong>de</strong> a ∈ A; esto es,d(x, A) = inf{d(x, a) : a ∈ A}.17
Nótese que si (X, d) es un espacio métrico y A ⊂ X entoncesd(x, A) = 0 para todo x ∈ A; pero que d(x, A) = 0 no implicaque x sea un elemento <strong>de</strong> A. Si consi<strong>de</strong>ramos por ejemplo elconjunto R <strong>de</strong> los números reales con la métrica usual y A ={ 1 n: n ∈ N} entonces d(0, A) = 0 y 0 /∈ A.1.1.4 Definición. Sea (X, d) un espacio métrico. Si A esun subconjunto <strong>de</strong> X entonces el diámetro <strong>de</strong> A, diam A essup{d(x, y) : x, y ∈ A}. Si diam A < ∞ entonces <strong>de</strong>cimos queel conjunto A es acotado.De la <strong>de</strong>finición se tiene que el espacio métrico X es acotado si lafunción d es acotada. Las condiciones que <strong>de</strong>be satisfacer la funcióndistancia d en un espacio métrico X son bastante rigurosas.En ocasiones una función d : X ×X −→ R, pudiendo no ser unamétrica en el sentido estricto, permite hablar <strong>de</strong> “distancia” losuficientemente bien para algunos propósitos.1.1.5 Definición. Sea X un conjunto. Una función ρ : X ×X −→ R tal que1. ρ(x, y) ≥ 0,2. ρ(x, x) = 0,3. ρ(x, y) = ρ(y, x) y4. ρ(x, y) ≤ ρ(x, z) + ρ(z, y)para cada x, ca<strong>de</strong> y y cada z en X, se llama una seudométricasobre X. Si ρ es una seudométrica sobre X <strong>de</strong>cimos que (X, ρ)(o simplemente X) es un espacio seudométrico.18
Nótese que en un espacio seudométrico (X, ρ) pue<strong>de</strong>n existirpuntos distintos x y y con ρ(x, y) = 0.1.1.6 Ejemplos.1. Toda métrica sobre un conjunto X es también una seudométrica.2. Si X es un conjunto entonces la función ρ : X × X −→ R<strong>de</strong>finida por ρ(x, y) = 0 es una seudométrica sobre X.3. Sea x 0 ∈ [0, 1]. La función η : C(I) × C(I) −→ R <strong>de</strong>finidapor η(f, g) = |f(x 0 −g(x 0 )| es una seudométrica sobre C(I).Ejercicios1.2. Funciones continuasSin duda el concepto más útil e importante en el estudio <strong>de</strong> losespacios métricos, seudométricos y en general <strong>de</strong> los espaciostopológicos es el concepto <strong>de</strong> continuidad.1.2.1 Definición. Sean (X, ρ) y (Y, η) espacios métricos (resp.seudométricos). Una función f : X −→ Y es continua en unpunto x 0 ∈ X si dado ɛ > 0 existe δ > 0 tal que si ρ(x, x 0 ) < δ,entonces η(f(x), f(x 0 )) < ɛ.Si la función f es continua en cada punto <strong>de</strong> X <strong>de</strong>cimos simplementeque f es continua.Los siguientes son ejemplos típicos <strong>de</strong> funciones continuas.19
1.2.2 Ejemplos.1. Si (X, d) es un espacio métrico entonces Id X : X −→ X,la función idéntica <strong>de</strong> X, es continua. En efecto, si x 0 ∈ Xy si ɛ es un número real positivo y consi<strong>de</strong>ramos δ = ɛentonces d(x, x 0 ) < δ implica d(Id X (x), Id X (x 0 )) < ɛ.2. Si (X, ρ) y (Y, η) son espacios métricos y si k ∈ Y es unpunto arbitrario pero fijo <strong>de</strong> Y , entonces la función constantef : X −→ Y <strong>de</strong> valor k es una función continua.Para <strong>de</strong>mostrar esto basta observar que si x 0 ∈ X, si ɛ > 0y si δ es un número real arbitrario, entonces ρ(x, x 0 ) < δimplica η(f(x), f(x 0 )) = η(k, k) = 0 < ɛ.El siguiente resultado muestra la continuidad <strong>de</strong> una funciónpoco mencionada hasta ahora.1.2.3 Proposición. Sean (X, d) un espacio métrico y A ⊂ X,A ≠ ∅. La función <strong>de</strong> X en los números reales <strong>de</strong>finida porx ↦−→ d(x, A) es continua.Demostración. Sean x 0 ∈ X y ɛ > 0. Escogemos 0 < γ < ɛ ytomamos δ = γ 2 . Si d(x, x 0) < δ y si a ∈ A es un punto tal qued(x 0 , a) < d(x 0 , A) + δ se tiene:d(x, A) ≤ d(x, a)≤ d(x, x 0 ) + d(x 0 , a)< 2δ + d(x 0 , A)= γ + d(x 0 , A)< ɛ + d(x 0 , A).20
De la misma forma si se escoge b ∈ A tal que d(x, b) < d(x, A)+δse encuentra queEntoncesEsto completa la <strong>de</strong>mostración.d(x 0 , A) < ɛ + d(x, A).|d(x, A) − d(x 0 , A)| < ɛ.Ejercicios1.3. Topología <strong>de</strong> un espacio métrico1.3.1 Definición. Sean (X, d) un espacio métrico, x ∈ X yɛ > 0. El conjunto B(x, ɛ) = {y ∈ X : d(x, y) < ɛ} se llamala bola abierta centrada en x con radio ɛ. El conjunto B[x, ɛ] ={y ∈ X : d(x, y) ≤ ɛ} se llama la bola cerrada centrada en xcon radio ɛ.Nótese que en R, la bola abierta centrada en un número real xcon radio ɛ es el intervalo abierto (x − ɛ, x + ɛ).La siguiente figura muestra la bola abierta <strong>de</strong> radio 1 centradaen el origen, para cada una <strong>de</strong> las métricas ρ, ρ 1 y ρ 2 <strong>de</strong>finidassobre R 2 en los numerales 2, 3 y 4 <strong>de</strong> los ejemplos 1.1.2..21
Por su parte, la bola abierta <strong>de</strong> radio ɛ centrada en una funciónf : R −→ R que pertenezca al espacio métrico <strong>de</strong>scrito en elnumeral 5. <strong>de</strong> los ejemplos 1.1.2., está formada por las funcionesacotadas que tienen su gráfica contenida en la franja que muestrala siguiente figura:Si X es un espacio discreto, es <strong>de</strong>cir si en X consi<strong>de</strong>ramos lamétrica discreta, entonces la bola abierta <strong>de</strong> radio ɛ > 0 centradaen un punto x ∈ X se reduce a {x} si ɛ ≤ 1 y es todo el conjuntoX si ɛ > 1.Si X es el Espacio Métrico <strong>de</strong> Sierpinski <strong>de</strong>finido en el numeral8 <strong>de</strong> 1.1.2. entonces la bola <strong>de</strong> radio 0 < ɛ ≤ 1 centrada encualquier punto x ∈ X se reduce a {x}.22
Una <strong>de</strong> las propieda<strong>de</strong>s más bonitas y relevantes <strong>de</strong> las bolas enun espacio métrico se enuncia en el siguiente resultado:1.3.2 Proposición. Si (X, d) es un espacio métrico, si a y bson elementos <strong>de</strong> X, si ɛ y δ son números reales positivos y six ∈ B(a, ɛ) ∩ B(b, δ) entonces existe γ > 0 tal que B(x, γ) ⊂B(a, ɛ) ∩ B(b, δ).Para probar esta proposición basta consi<strong>de</strong>rar γ = mín{ɛ −d(a, x), δ − d(x, b)} y utilizar la <strong>de</strong>sigualdad triangular.En los espacios métricos tenemos la posibilidad <strong>de</strong> hablar <strong>de</strong>“cercanía”. Decir que un punto está tan cerca <strong>de</strong> otro comoqueramos, significa que los puntos están a una distancia menorque un número positivo que hemos fijado con anterioridad. Enotras palabras, si para nosotros “estar suficientemente cerca”<strong>de</strong> un punto a significa estar a una distancia menor que uncierto número ɛ > 0, entonces los “vecinos” <strong>de</strong> a o los puntos“suficientemente cercanos a a” son precisamente los elementos<strong>de</strong>l conjunto B(a, ɛ). Estas consi<strong>de</strong>raciones sugieren la siguiente<strong>de</strong>finición:23
1.3.3 Definición. Sean X un espacio métrico y x ∈ X. Unsubconjunto V <strong>de</strong> X es una vecindad <strong>de</strong> x si existe ɛ > 0 talque B(x, ɛ) ⊂ V . Denotamos por V(x) al conjunto <strong>de</strong> todas lasvecinda<strong>de</strong>s <strong>de</strong>l punto x.1.3.4 Ejemplos.1. En los números reales el intervalo [1, +∞) es una vecindad<strong>de</strong> 3 (en realidad es una vecindad <strong>de</strong> cualquier real mayorque 1); pero no es una vecindad <strong>de</strong> 1.2. El conjunto {x ∈ R : |x| > 2} es una vecindad <strong>de</strong> 3 en R.3. La bola cerrada B[x, 1] es una vecindad <strong>de</strong> x = (0, 0) en R 2 .4. El conjunto A = {(x, y) : y < x} es una vecindad <strong>de</strong> cadauno <strong>de</strong> los puntos <strong>de</strong> A.5. El conjunto {f : R −→ R : |f(x)| < 2 para cada x ∈ R}es una vecindad <strong>de</strong> la función arctan x en el espacio <strong>de</strong>funciones acotadas <strong>de</strong>finido en el numeral 5. <strong>de</strong> 1.1.2..Los items 2 y 4 <strong>de</strong> los ejemplos anteriores muestran conjuntosmuy especiales en los que se basará todo nuestro estudio entopología. Tienen en común la característica <strong>de</strong> ser vecinda<strong>de</strong>s<strong>de</strong> cada uno <strong>de</strong> sus puntos. De estos conjuntos diremos que sonconjuntos abiertos.1.3.5 Definición. Un subconjunto A <strong>de</strong> un espacio métrico Xes un conjunto abierto en X si A es vecindad <strong>de</strong> cada uno <strong>de</strong>sus puntos.24
Consi<strong>de</strong>remos un espacio métrico X. De la <strong>de</strong>finición se infieren<strong>de</strong> manera natural los siguientes hechos:1. El conjunto vacío ∅ y el conjunto X son conjuntos abiertos.2. Si A y B son conjuntos abiertos en X entonces A ∩ B es unconjunto abierto en X.3. La unión <strong>de</strong> cualquier familia <strong>de</strong> conjuntos abiertos en Xes un conjunto abierto en X.Nótese que en un espacio métrico X las bolas abiertas son conjuntosabiertos y que cada conjunto abierto se pue<strong>de</strong> expresarcomo una unión <strong>de</strong> bolas abiertas. Decimos entonces que lasbolas abiertas “generan” los conjuntos abiertos. Más a<strong>de</strong>lanteexpresaremos este hecho diciendo que las bolas abiertas “generanla topología <strong>de</strong>l espacio X” o que “son una base para latopología <strong>de</strong> X”.La siguiente <strong>de</strong>finición establece un criterio que nos permitesaber cuándo, <strong>de</strong>s<strong>de</strong> el punto <strong>de</strong> vista puramente topológico,vale la pena distinguir entre dos métricas aparentemente distintas.1.3.6 Definición. Dos métricas sobre un conjunto X sonequivalentes si generan los mismos conjuntos abiertos.1.3.7 Ejemplos.1. Hemos visto que si X es un conjunto contable entonces lossubconjuntos unitarios <strong>de</strong> X son bolas abiertas, tanto si25
consi<strong>de</strong>ramos la métrica discreta sobre X, como si consi<strong>de</strong>ramosla métrica <strong>de</strong> Sierpinski. Estas dos métricas generanentonces los mismos conjuntos abiertos en X. En otraspalabras, estas métricas son equivalentes.2. Los numerales 2, 3 y 4 <strong>de</strong> 1.1.2. establecen métricas equivalentessobre R 2 .3. Si (X, d) es un espacio métrico, la función d 1 : X × X −→R <strong>de</strong>finida por d 1 (x, y) = mín{d(x, y), 1} es una métricaacotada sobre X equivalente a la métrica d.Estudiaremos otros conceptos topológicos en espacios métricosa lo largo <strong>de</strong> los siguientes capítulos.Ejercicios26
Capítulo 2Espacios TopológicosLa distancia <strong>de</strong>finida en un espacio métrico da lugar al concepto<strong>de</strong> bola abierta, que a su vez permite hablar <strong>de</strong> las vecinda<strong>de</strong>s<strong>de</strong> un punto y <strong>de</strong> los conjuntos abiertos en el espacio. En estecapítulo generalizamos estas i<strong>de</strong>as a otros conjuntos en los queno necesariamente se tiene la noción <strong>de</strong> distancia.2.1. Bases para una topología - Conjuntos abiertosHemos visto que en un espacio métrico (X, d) las bolas abiertassatisfacen las siguientes propieda<strong>de</strong>s:⋃1.x∈X,ɛ>0B(x, ɛ) = X.2. Si a, b ∈ X, si ɛ, δ > 0 y si x ∈ B(a, ɛ) ∩ B(b, δ) entoncesexiste γ > 0 tal que B(x, γ) ⊂ B(a, ɛ) ∩ B(b, δ).Con estas propieda<strong>de</strong>s en mente y teniendo en cuenta que lacolección <strong>de</strong> bolas abiertas en un espacio métrico da lugar aconceptos tan importantes como el concepto <strong>de</strong> vecindad y el <strong>de</strong>27
conjunto abierto que nos permiten estudiar el espacio métrico aprofundidad, formulamos la siguiente <strong>de</strong>finición:2.1.1 Definición. Sea X un conjunto. Una colección B <strong>de</strong> subconjuntos<strong>de</strong> X es una base para una topología sobre X si sesatisfacen las siguientes condiciones:⋃1.B∈B B = X.2. Si B 1 , B 2 ∈ B y x ∈ B 1 ∩ B 2 entonces existe C ∈ B talque x ∈ C y C ⊂ B 1 ∩ B 2 .La primera condición nos dice que todo elemento <strong>de</strong> X <strong>de</strong>bepertenecer a un elemento <strong>de</strong> B y la segunda que la intersección<strong>de</strong> dos elementos <strong>de</strong> la colección B se pue<strong>de</strong> expresar como unaunión <strong>de</strong> elementos <strong>de</strong> la misma colección.2.1.2 Ejemplos.1. La colección <strong>de</strong> todas las bolas abiertas en un espacio métricoX es una base para una topología sobre X.2. La colección <strong>de</strong> todos los intervalos <strong>de</strong> la forma [a, b) con ay b números reales y a < b es una base para una topologíasobre R.Al igual que suce<strong>de</strong> en los espacios métricos, el concepto <strong>de</strong> basepara una topología da lugar al concepto <strong>de</strong> conjunto abierto.2.1.3 Definición. Sean X un conjunto y B una base para unatopología sobre X. Un subconjunto A <strong>de</strong> X es un conjuntoabierto en X si es unión <strong>de</strong> una familia <strong>de</strong> elementos <strong>de</strong> B.28
La colección <strong>de</strong> todos los conjuntos abiertos en X es la topologíasobre X generada por B. Esta <strong>de</strong>finición justifica el término“base para una topología” sobre X.Nótese que, al igual que en los espacios métricos, la topologíasobre X generada por B tiene las siguientes propieda<strong>de</strong>s:1. El conjunto vacío ∅ y el conjunto X son conjuntos abiertos.2. Si A y B son conjuntos abiertos en X entonces A ∩ B es unconjunto abierto en X.3. La unión <strong>de</strong> cualquier familia <strong>de</strong> conjuntos abiertos en Xes un conjunto abierto en X.Ejercicios2.2. Espacios topológicosEn realidad, para estudiar conceptos topológicos no siempre partimos<strong>de</strong> una base para una topología sobre un conjunto X. Confrecuencia tenemos como punto <strong>de</strong> partida la colección <strong>de</strong> todoslos conjuntos abiertos. Trabajaremos entonces con la siguiente<strong>de</strong>finición:29
2.2.1 Definición. Sea X un conjunto. Una colección τ <strong>de</strong> subconjuntos<strong>de</strong> X tal que1. el conjunto vacío ∅ y el conjunto X pertenecen a τ,2. si A, B ∈ τ entonces A ∩ B ∈ τ,3. la unión <strong>de</strong> cualquier familia <strong>de</strong> elementos <strong>de</strong> τ pertenecea τes una topología sobre X. Los elementos <strong>de</strong> la colección τ sellaman conjuntos abiertos y la pareja (X, τ), o simplemente Xsi no cabe duda sobre cuál es la colección τ, se llama un espaciotopológico.2.2.2 Ejemplos.1. Si X es un espacio métrico, la topología generada por lacolección <strong>de</strong> todas las bolas abiertas es una topología sobreX que se llama la topología métrica o la topología generadapor la métrica. Los espacios métricos son una importanteclase <strong>de</strong> espacios topológicos.La topología usual sobre R, y en general sobre R n , es latopología generada por la métrica usual.Si la topología sobre un espacio X está generada por unamétrica <strong>de</strong>cimos que X es un espacio metrizable.2. Sea X un conjunto cualquiera. La colección P(X) <strong>de</strong> todoslos subconjuntos <strong>de</strong> X es una topología sobre X que recibeel nombre <strong>de</strong> topología discreta. El espacio (X, P(X)) sellama espacio discreto. Nótese que esta topología está generadapor la métrica discreta sobre X.30
3. Sea X un conjunto cualquiera. La colección {∅, X} es unatopología sobre X que se llama topología trivial o topologíagrosera. El espacio X con esta topología es un espacio trivialo espacio grosero.4. La colección τ = {∅, {0}, {0, 1}} es la topología <strong>de</strong> Sierpinskisobre el conjunto X = {0, 1}. El espacio (X, τ) sellama el espacio <strong>de</strong> Sierpinski.5. La colección {(a, +∞) : a ∈ R} ∪ {R} es una topologíasobre R que se acostumbra llamar la topología <strong>de</strong> las colas a<strong>de</strong>recha. Por su parte, la colección {(−∞, a) : a ∈ R}∪{R}es también una topología sobre R que se llama la topología<strong>de</strong> las colas a izquierda.6. Sea X un conjunto infinito. La colección{A ⊂ X : A c es finito } ∪ {∅}es una topología sobre X que recibe el nombre <strong>de</strong> topología<strong>de</strong> los complementos finitos.7. Sea X un conjunto. La colección{A ⊂ X : A c es contable } ∪ {∅}es una topología sobre X que recibe el nombre <strong>de</strong> topología<strong>de</strong> los complementos contables.8. Un subconjunto A <strong>de</strong>l plano R 2 se llama radialmente abiertosi por cada uno <strong>de</strong> sus puntos existe un segmento abierto<strong>de</strong> linea recta en cada dirección, que contiene al punto yestá contenido en el conjunto. Es inmediato que la colección<strong>de</strong> todos los conjuntos radialmente abiertos es una topologíasobre R 2 que se llama topología radial. El plano R 2 juntocon esta topología es el plano radial.31
Consi<strong>de</strong>remos sobre el conjunto <strong>de</strong> los números reales la topologíausual τ usual y la topología <strong>de</strong> las colas a <strong>de</strong>recha τ C . Nóteseque cada conjunto abierto en el espacio (R, τ C ) es un conjuntoabierto en (R, τ usual ). Expresamos este hecho diciendo que τ Ces menos fina que τ usual o que τ usual es más fina que τ C . Engeneral tenemos la siguiente <strong>de</strong>finición:2.2.3 Definición. Sean X un conjunto y τ 1 , τ 2 topologías sobreX. Decimos que τ 1 es menos fina que τ 2 o que τ 2 es más finaque τ 1 si τ 1 ⊂ τ 2 .Como es natural, si τ 1 es menos fina que τ 2 y τ 2 es menos finaque τ 1 entonces τ 1 = τ 2 .2.2.4 Ejemplos.1. Recor<strong>de</strong>mos la métrica <strong>de</strong>l taxista ρ 1 <strong>de</strong>finida sobre R 2 porρ 1 ((x 1 , y 1 ), (x 2 , y 2 )) = |x 1 − x 2 | + |y 1 − y 2 |.Si (x 1 , y 1 ) ∈ R 2 y ɛ > 0 entonces{(x, y) : |x − x 1 | + |y − y 1 | < ɛ}⊂ {(x, y) : √ (x − x 1 ) 2 + (y − y 1 ) 2 < ɛ}.32
Esto implica que la topologíausual sobre R 2 es menos finaque la topología generada porla métrica <strong>de</strong>l taxista.A<strong>de</strong>más se tiene que{(x, y) : √ √ }2ɛ(x − x 1 ) 2 + (y − y 1 ) 2
2. Si z es un punto en una bola abierta en R 2 con la topologíausual, para cada posible dirección existe un segmento abierto<strong>de</strong> linea en esta dirección, que contiene a z y que está contenidoen la bola. Esto implica que la topología usual <strong>de</strong> R 2es menos fina que la topología radial.Ejercicios2.3. Vecinda<strong>de</strong>sAhora estamos en capacidad <strong>de</strong> <strong>de</strong>finir el concepto <strong>de</strong> vecindad<strong>de</strong> un punto en un espacio topológico.2.3.1 Definición. Sean X un espacio topológico y x ∈ X. Unsubconjunto V <strong>de</strong> X es una vecindad <strong>de</strong> x si existe un conjuntoabierto A tal que x ∈ A y A ⊂ V . Denotamos por V(x) elconjunto <strong>de</strong> todas las vecinda<strong>de</strong>s <strong>de</strong> x.Nótese que un subconjunto A <strong>de</strong> un espacio topológico X es unconjunto abierto si y sólo si A es vecindad <strong>de</strong> cada uno <strong>de</strong> suspuntos.El siguiente resultado resume las propieda<strong>de</strong>s más importantes<strong>de</strong> las vecinda<strong>de</strong>s.2.3.2 Proposición. Sea (X, τ) un espacio topológico.1. x ∈ V para cada V ∈ V(x).34
2. Si U, V ∈ V(x) entonces U ∩ V ∈ V(x).3. Si U ∈ V(x) entonces existe V ∈ V(x) tal que U ∈ V(y)para cada y ∈ V .4. Si U ∈ V(x) y U ⊂ V entonces V ∈ V(x).Demostración.1. La primera afirmación es consecuencia inmediata <strong>de</strong> la <strong>de</strong>finición<strong>de</strong> vecindad.2. Si A, B ∈ τ, x ∈ A, x ∈ B, A ⊂ U y B ⊂ V entoncesA ∩ B ∈ τ, x ∈ A ∩ B y A ∩ B ⊂ U ∩ V .3.Puesto que U ∈ V(x) existeV ∈ τ tal que x ∈ V y V ⊂U. Entonces para cada y ∈V , U ∈ V(y).4. Si A ∈ τ es tal que x ∈ A y A ⊂ U entonces también A ⊂ Vy así V ∈ V(x).En nuestra discusión incial <strong>de</strong> este capítulo vimos cómo generaruna topología sobre un conjunto X partiendo <strong>de</strong> una colección <strong>de</strong>subconjuntos <strong>de</strong> X con las mismas propieda<strong>de</strong>s <strong>de</strong> la colección <strong>de</strong>35
olas abiertas en un espacio métrico. Esto es, partiendo <strong>de</strong> unabase para una topología sobre X. Ahora veremos que si tomamoscomo punto <strong>de</strong> partida colecciones con las mismas propieda<strong>de</strong>s<strong>de</strong> las vecinda<strong>de</strong>s <strong>de</strong> los puntos, también po<strong>de</strong>mos generar unatopología sobre el conjunto X.2.3.3 Proposición. Sea X un conjunto. Si para cada x ∈ X seha asignado una colección V(x) <strong>de</strong> subconjuntos <strong>de</strong> X tal que:1. x ∈ V para cada V ∈ V(x),2. si U, V ∈ V(x) entonces U ∩ V ∈ V(x),3. si U ∈ V(x) entonces existe V ∈ V(x) tal que U ∈ V(y)para cada y ∈ V ,4. si U ∈ V(x) y U ⊂ V entonces V ∈ V(x),entonces existe una topología sobre X tal que para cada x ∈ Xla colección V(x) es precisamente la colección <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong>x.Demostración. Diremos que un conjunto A ⊂ X es “abierto” sipara cada x ∈ A existe V ∈ V(x) tal que V ⊂ A. Demostraremosahora que la colección <strong>de</strong> conjuntos “abiertos” es una topologíasobre X y que la colección <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> cada x ∈ X es V(x).1. Es inmediato que ∅ y X son conjuntos “abiertos”.2. Si A y B son conjuntos “abiertos” y si x ∈ A ∩ B, existenU, V ∈ V(x) tales que U ⊂ A y V ⊂ B. Por hipótesisU ∩ V ∈ V(x) y puesto que U ∩ V ⊂ A ∩ B, A ∩ B es unconjunto “abierto” .36
3. Si A es una familia <strong>de</strong> conjuntos “abiertos” y x ∈ A entoncesx ∈ A para algún A ∈ A. Existe V ∈ V(x) tal queV ⊂ A, así V ⊂ ∪A y se concluye que ∪A es un conjunto“abierto” .Entonces la colección τ <strong>de</strong> conjuntos “abiertos” es una topologíasobre X.Por otra parte, si W es una vecindad <strong>de</strong> x existe A ∈ τ tal quex ∈ A y A ⊂ W . Como A ∈ τ, existe V ∈ V(x) tal que V ⊂ A,entonces V ⊂ W , luego W ∈ V(x).De manera recíproca, si V ∈ V(x) y si a<strong>de</strong>másU = {y ∈ V : V es una vecindad <strong>de</strong> y},entonces U es un conjunto abierto que contiene a x y está contenidoen V .En R con la topología usual los intervalos abiertos centrados enun punto x dan lugar a todas las vecinda<strong>de</strong>s <strong>de</strong> x en el siguientesentido: Toda vecindad <strong>de</strong> x contiene un intervalo abiertocentrado en x. Diremos que los intervalos abiertos centrados enx son un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong>l punto x. Engeneral tenemos la siguiente <strong>de</strong>finición:2.3.4 Definición. Sean X un espacio topológico y x ∈ X.Un subconjunto B(x) <strong>de</strong> V(x) es un sistema fundamental <strong>de</strong>vecinda<strong>de</strong>s <strong>de</strong> x si para cada V ∈ V(x) existe U ∈ B(x) tal queU ⊂ V . Llamamos a los elementos <strong>de</strong> B(x) vecinda<strong>de</strong>s básicas<strong>de</strong> x.37
2.3.5 Ejemplos.1. Sean X un espacio topológico y x ∈ X. La colección <strong>de</strong> todaslas vecinda<strong>de</strong>s abiertas <strong>de</strong> x es un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x.2. Si X es un espacio topológico discreto y x ∈ X entonces elconjunto cuyo único elemento es {x} es un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x.3. Si X es un espacio métrico y x ∈ X, el conjunto <strong>de</strong> todaslas bolas abiertas centradas en x es un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x. También lo es el conjunto <strong>de</strong> todas lasbolas abiertas con radio racional, centradas en x.De la <strong>de</strong>finición se infiere que si X es un espacio topológico ypara cada x ∈ X la colección B(x) es un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x entonces:1. Si V ∈ B(x), entonces x ∈ V .2. Si V 1 , V 2 ∈ B(x), entonces existe V 3 ∈ B(x) tal que V 3 ⊂V 1 ∩ V 2 .3. Si V ∈ B(x), existe U ∈ B(x) tal que si y ∈ U entoncesW ⊂ V para algún W ∈ B(y).4. Un subconjunto A <strong>de</strong> X es abierto si y sólo si contiene unavecindad básica <strong>de</strong> cada uno <strong>de</strong> sus puntos.Al igual que suce<strong>de</strong> con las bases para una topología y conlas colecciones <strong>de</strong> vecinda<strong>de</strong>s, colecciones <strong>de</strong> subconjuntos <strong>de</strong>38
un conjunto X con las propieda<strong>de</strong>s “a<strong>de</strong>cuadas” para ser sistemasfundamentales <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> los puntos <strong>de</strong> X, permitengenerar una topología sobre X como lo muestra el siguienteresultado.2.3.6 Proposición. Sea X un conjunto. Si para cada x ∈ X seha asignado una colección B(x) <strong>de</strong> subconjuntos <strong>de</strong> X tal que:1. x ∈ V para cada V ∈ B(x),2. si U, V ∈ B(x) entonces existe W ∈ B(x) tal que W ⊂U ∩ V ,3. si U ∈ B(x) entonces existe V ∈ B(x) tal que para caday ∈ V , existe W ∈ B(y) con W ⊂ U,entonces existe una topología sobre X tal que para cada x ∈ Xla colección B(x) es un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x.Demostración. Para cada x ∈ X la colección V(x) = {U ⊂X : V ⊂ U para algún V ∈ B(x)} satisface las hipótesis <strong>de</strong> laproposición 2.3.3, luego existe una topología sobre X tal quepara cada x ∈ X se tiene que V(x) es la colección <strong>de</strong> todaslas vecinda<strong>de</strong>s <strong>de</strong> x. Resulta inmediato que B(x) es un sistemafundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x para cada x ∈ X.2.3.7 Ejemplos.1. Los conjuntos <strong>de</strong> la forma [x, y) con x < y forman un sistemafundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x para una topologíasobre R. En efecto, si x < y entonces x ∈ [x, y), si x < yy x < z y se tiene x < w < mín{y, z} entonces [x, w) ⊂39
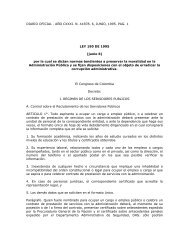
[x, y) ∩ [x, z) y finalmente, si x < y y z ∈ [x, y) entonces[z, y) ⊂ [x, y).2.Sea Γ = {(x, y) ∈ R 2 : y ≥ 0}. Si y > 0 las vecinda<strong>de</strong>sbásicas <strong>de</strong> z = (x, y) serán las bolas abiertas usuales centradasen z con radio menor o igual que y y si y ′ = 0, lasvecinda<strong>de</strong>s básicas <strong>de</strong> z ′ = (x ′ , y ′ ) son los conjuntos <strong>de</strong> laforma {z ′ } ∪ A don<strong>de</strong> A es una bola abierta contenida en Γtangente al eje real en z ′ .El espacio topológico que se obtiene recibe el nombre <strong>de</strong>Plano <strong>de</strong> Moore.40
3.Para cada punto z <strong>de</strong>l plano<strong>de</strong>finimos las vecinda<strong>de</strong>s básicas<strong>de</strong> z como los conjuntos <strong>de</strong> laforma {z} ∪ A don<strong>de</strong> A es unabola abierta usual, centrada enz, <strong>de</strong> la cual se ha removido unnúmero finito <strong>de</strong> segmentos <strong>de</strong>linea que pasan por z.El espacio topológico que se obtiene se llama plano ranurado.4. Para cada número real x distinto <strong>de</strong> 0 <strong>de</strong>finimos B(x) comolos intervalos abiertos centrados en x mientras que los elementos<strong>de</strong> B(0) serán los conjuntos <strong>de</strong> la forma (−∞, −n)∪(−ɛ, ɛ) ∪ (n, ∞) don<strong>de</strong> n ∈ N y ɛ > 0.5. Consi<strong>de</strong>remos el conjunto R I <strong>de</strong> todas las funciones <strong>de</strong>finidas<strong>de</strong>l intervalo I = [0, 1] en R. Definimos las vecinda<strong>de</strong>sbásicas <strong>de</strong> f ∈ R I como los conjuntos <strong>de</strong> la forma U(f, F, δ) ={g ∈ R I : |g(x) − f(x)| < δ, para cada x ∈ F } don<strong>de</strong> F esun subconjunto finito <strong>de</strong> I y δ > 0.Ejercicios2.4. Conjuntos cerradosLigado íntimamente con el concepto <strong>de</strong> conjunto abierto en unespacio topológico, está el concepto <strong>de</strong> conjunto cerrado.41
2.4.1 Definición. Sea X un espacio topológico. Un subconjuntoF <strong>de</strong> X es un conjunto cerrado en X si su complemento,F c , es un conjunto abierto.Hacemos notar que el conjunto vacío y el mismo conjunto X sona la vez abiertos y cerrados y que un subconjunto <strong>de</strong> X pue<strong>de</strong> noser abierto ni cerrado como suce<strong>de</strong> por ejemplo con el conjunto{1} en el espacio <strong>de</strong> Sierpinski.La siguiente proposición establece algunas <strong>de</strong> las más importantespropieda<strong>de</strong>s <strong>de</strong> los conjuntos cerrados.2.4.2 Proposición. Sea X un espacio topológico.1. ∅ y X son conjuntos cerrados.2. Si F y K son conjuntos cerrados entonces F ∪ K es unconjunto cerrado.3. Si C es una familia <strong>de</strong> conjuntos cerrados entonces ⋂ F ∈C Fes un conjunto cerrado.Demostración.1. Que ∅ y X son conjuntos cerrados es una consecuencia inmediata<strong>de</strong> la <strong>de</strong>finición.2. Por las Leyes <strong>de</strong> De Morgan, (F ∪ K) c = F c ∩ K c que esun conjunto abierto porque así lo son F c y K c .3. Nuevamente por las Leyes <strong>de</strong> De Morgan, (⋂ F ∈C F ) c=⋃F ∈C F c que es también un conjunto abierto.42
La unión arbitraria <strong>de</strong> conjuntos cerrados no siempre es un conjuntocerrado como lo muestra el siguiente ejemplo.2.4.3 Ejemplo. Sea R el espacio <strong>de</strong> los números reales [ con latopología usual. La colección <strong>de</strong> conjuntos <strong>de</strong> la forma −1, 1 − 1 ]ndon<strong>de</strong> n ∈ N, es una familia <strong>de</strong> conjuntos cerrados cuya uniónes el intervalo [−1, 1) que no es un conjunto cerrado.Ejercicios2.5. Adherencia <strong>de</strong> un conjuntoEn los conjuntos cerrados se nota un hecho particular. Si unpunto está fuera <strong>de</strong> un conjunto cerrado, intuitivamente se sabeque el punto está “realmente muy lejos” <strong>de</strong>l conjunto. Esto sesabe porque existe toda una vecindad <strong>de</strong>l punto contenida enel complemento <strong>de</strong>l conjunto. En otras palabras, si un conjuntoes cerrado no hay puntos “adheridos” a él que se encuentrenfuera <strong>de</strong> él. Acudiendo nuevamente a la intuición, diriamos queun punto está “adherido” a un conjunto si con seguridad encontraremospuntos <strong>de</strong>l conjunto tan “cerca” como queramos <strong>de</strong>lpunto. Esta i<strong>de</strong>a que surge <strong>de</strong> manera natural <strong>de</strong> nuestra propiaexperiencia da lugar a la siguiente <strong>de</strong>finición.2.5.1 Definición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X. Un punto x ∈ X es adherente a A si todavecindad <strong>de</strong> x contiene puntos <strong>de</strong> A. El conjunto <strong>de</strong> todos lospuntos adherentes a A se <strong>de</strong>nota por A y se llama la adherencia<strong>de</strong> A.43
2.5.2 Ejemplos.{ }−11. Consi<strong>de</strong>remos A =n : n ∈ N como subconjunto <strong>de</strong> R.El número 0 es adherente a A si sobre R consi<strong>de</strong>ramos latopología usual, pero 0 NO es adherente a A si sobre R consi<strong>de</strong>ramosla topología discreta o la topología generada porlos intervalos <strong>de</strong> la forma [a, b) con a < b. Nótese que cadaelemento <strong>de</strong> A es adherente a A. Dado n ∈ N, cualquiervecindad <strong>de</strong> −1−1contiene por lo menos ann .2. En el Plano <strong>de</strong> Moore, cada punto <strong>de</strong> la forma (a, 0) esadherente al conjunto {(x, y) : y > 0}.3. Si R 2 tiene la topología <strong>de</strong> los complementos finitos, el punto(0, 0) es adherente al conjunto A = {(x, y) : y > x 2 + 1}.Este punto NO es adherente a A si estamos consi<strong>de</strong>randola topología usual sobre R 2 .4. En R con la topología usual la adherencia <strong>de</strong>l intervalo (a, b)es el intervalo [a, b]. Sin embargo no en todo espacio métricola adherencia <strong>de</strong> la bola abierta B(x, ɛ) es la bola cerradaB[x, ɛ]. Si X es un conjunto con más <strong>de</strong> un punto y consi<strong>de</strong>ramosla métrica discreta sobre X, entonces para x ∈ X,B(x, 1) = {x} y B[x, 1] = X.5. La adherencia <strong>de</strong>l conjunto <strong>de</strong> los números racionales Q enR es R. En este caso <strong>de</strong>cimos que el conjunto Q es <strong>de</strong>nso enR. En general, <strong>de</strong>cimos que un subconjunto A <strong>de</strong> un espaciotopológico X es <strong>de</strong>nso en X si A = X.El comentario final <strong>de</strong>l primer ejemplo nos hace reflexionar sobreun hecho completamente natural:44
Si X es un espacio topológico y A ⊂ X, entonces A ⊂ A.A<strong>de</strong>más resulta también inmediato que si A ⊂ B entonces A ⊂B.El siguiente resultado nos permite hacer otra presentación <strong>de</strong> laadherencia <strong>de</strong> un conjunto.2.5.3 Proposición. Si X un espacio topológico y A ⊂ X entoncesA = ⋂ {K ⊂ X : K es cerrado y A ⊂ K}.Demostración.1. Si x ∈ A y K es un subconjunto cerrado <strong>de</strong> X que contienea A entonces x ∈ K, pues <strong>de</strong> lo contrario existiríauna vecindad V <strong>de</strong> x con V ⊂ K c , lo cual implicaría queV no contiene puntos <strong>de</strong> A. Entonces x ∈ ⋂ {K ⊂ X :K es cerrado y A ⊂ K}.2. Por otro lado, si x /∈ A existe una vecindad abierta V <strong>de</strong>x sin puntos en común con A, entonces V c es un conjuntocerrado tal que A ⊂ V c y x /∈ V c . Esto significa que x /∈⋂ {K ⊂ X : K es cerrado y A ⊂ K}.Algunas <strong>de</strong> las más importantes propieda<strong>de</strong>s <strong>de</strong> la adherencia seresumen en el siguiente resultado.2.5.4 Proposición. Sea X un espacio topológico.1. A = A para cada A ⊂ X.45
2. A ∪ B = A ∪ B para cada A, B ⊂ X.3. A ⊂ X es cerrado si y sólo si A = A.Demostración.1. Por ser intersección <strong>de</strong> conjuntos cerrados, A es un conjuntocerrado que contiene a A. Entonces A ⊂ A. La otrainclusión es inmediata.2. El conjunto A ∪ B es cerrado y contiene a A ∪ B, entoncescontiene también a A ∪ B, entonces A ∪ B ⊂ A ∪ B. Porotro lado, puesto que A ⊂ A ∪ B y B ⊂ A ∪ B se tiene queA ⊂ A ∪ B y B ⊂ A ∪ B, entonces A ∪ B ⊂ A ∪ B.3. Si A es cerrado, A ⊂ A, lo que implica A = A. Por otraparte, si A = A y x /∈ A existe V ∈ V(x) tal que V ∩A = ∅.Entonces V ⊂ A c , <strong>de</strong> don<strong>de</strong> A c es abierto y A es cerrado.Cuando se tiene un espacio topológico X automáticamente setiene una función, que se llama operación <strong>de</strong> adherencia <strong>de</strong> Kuratowski,<strong>de</strong> P(X) en P(X) que asigna a cada subconjunto A <strong>de</strong>X su adherencia A. De manera recíproca, dado un conjunto X yuna función A ↦−→ A : P(X) −→ P(X) con las propieda<strong>de</strong>s a<strong>de</strong>cuadas,se pue<strong>de</strong> encontrar una topología sobre X en la que laadherencia <strong>de</strong> cada subconjunto <strong>de</strong> X está dada por la función.Este es el resultado que se presenta en la siguiente proposición.2.5.5 Proposición. Sea X un conjunto y supongamos que seha <strong>de</strong>finido una operación A ↦−→ A : P(X) −→ P(X) tal que46
1. A ⊂ A para cada A ⊂ X.2. A = A para cada A ⊂ X.3. A ∪ B = A ∪ B para cada A, B ⊂ X.4. ∅ = ∅.Existe una topología sobre X cuya operación <strong>de</strong> adherencia esprecisamente A ↦−→ A.Demostración. Como nuestro <strong>de</strong>seo es que la operación dada seala operación <strong>de</strong> adherencia en el espacio topológico que formemos,comenzaremos por dar la colección <strong>de</strong> los que esperamossean conjuntos cerrados. Sea F = {F ⊂ X : F = F }. Veamosque la colección τ = {A : A c ∈ F} es la topología sobre X queestamos buscando.1. Puesto que ∅ ∈ F, X ∈ τ. Por otro lado, X ⊂ X, luegoX = X, <strong>de</strong> don<strong>de</strong> X ∈ F, por tanto ∅ ∈ τ.2. Si A, B ∈ τ se tiene(A ∩ B) c = A c ∪ B c= A c ∪ B c= A c ∪ B c= (A ∩ B) c ,entonces (A ∩ B) c ∈ F y A ∩ B ∈ τ.3. Veamos ahora que la unión <strong>de</strong> cualquier colección <strong>de</strong> elementos<strong>de</strong> τ pertenece a τ. En primer lugar, nótese que siA ⊂ B entonces B = A ∪ B, luego B = A ∪ B = A ∪ B,<strong>de</strong> don<strong>de</strong> A ⊂ B. Así se tiene que si C ⊂ F entonces47
⋂C∈C C ⊂ C para cada C ∈ C, <strong>de</strong> don<strong>de</strong> ⋂ C∈C C ⊂ C = Cpara cada C ∈ C, lo cual implica que ⋂ C∈C C ⊂ ⋂ C∈C C.Esto significa que ⋂ C∈C C ∈ F.Si A es una familia <strong>de</strong> subconjuntos <strong>de</strong> X contenida en τse tiene( ⋃AA∈AA c) c= ⋂ A∈A= ⋂ A∈AA c= ⋂ A∈AA c( c ⋃= A),A∈Aentonces (⋃ A∈A A) c∈ F y⋃A∈A A ∈ τ.2.5.6 Ejemplos.1. Sea X cualquier conjunto. Diremos que para cada A ⊂ X,A = A. En este caso cada subconjunto <strong>de</strong> X será un conjuntocerrado y la topología que se genera a partir <strong>de</strong> estaoperación <strong>de</strong> adherencia es la topología discreta.2. Sea X un conjunto cualquiera y <strong>de</strong>finamos ahora A = Xpara todo A ⊂ X, A ≠ ∅ y ∅ = ∅. En este caso encontramosla topología trivial o grosera sobre X.48
3. Si X es un conjunto infinito y para cada A ⊂ X <strong>de</strong>finimos{A si A es finitoA =X si A es infinito,obtenemos la topología <strong>de</strong> complementos finitos sobre X.4. Si para cada A ⊂ R <strong>de</strong>finimos⎧(−∞, sup A] si A es no vacío y está acotado⎪⎨A = Rsuperiormentesuperiormente⎪⎩∅ si A = ∅,si A es no vacío y no está acotadoobtenemos la topología <strong>de</strong> colas a <strong>de</strong>recha sobre R.5. Sean X un conjunto y B un subconjunto fijo <strong>de</strong> X. Paracada A ⊂ X <strong>de</strong>finimos{A ∪ B si A ≠ ∅A =∅ si A = ∅.La función A ↦−→ A es una operación <strong>de</strong> adherencia queda lugar a una topología sobre X para la cual los conjuntoscerrados son ∅ y los subconjuntos <strong>de</strong> X que contienen a B.Ejercicios49
2.6. Puntos <strong>de</strong> acumulaciónEl concepto que estudiaremos ahora permite también caracterizarlos conjuntos cerrados en un espacio topológico.2.6.1 Definición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X. Un punto x ∈ X es un punto <strong>de</strong> acumulación<strong>de</strong> A si para cada vecindad V <strong>de</strong> x se tiene V ∩ (A {x} ≠ ∅.El conjunto <strong>de</strong> todos los puntos <strong>de</strong> acumulación <strong>de</strong> A se <strong>de</strong>notapor A ′ y se llama el <strong>de</strong>rivado <strong>de</strong> A.De la <strong>de</strong>finición se tieneasí como también queA ′ ⊂ AA = A ∪ A ′y <strong>de</strong> esta última igualdad se concluye que un conjunto A escerrado si y sólo si contiene todos sus puntos <strong>de</strong> acumulación.2.6.2 Ejemplo. Observe { que en R}con la topología usual, cada1punto <strong>de</strong>l conjunto A =n : n ∈ N es adherente a A pero queningún elemento <strong>de</strong> A es punto <strong>de</strong> acumulación <strong>de</strong> A. El únicopunto <strong>de</strong> acumulación <strong>de</strong> este conjunto es 0.Ejercicios50
2.7. Interior, exterior y frontera <strong>de</strong> un conjuntoEstudiaremos ahora un concepto tan importante en topologíacomo el concepto <strong>de</strong> punto adherente.2.7.1 Definición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X. Un punto x ∈ X es interior a A si existe unavecindad <strong>de</strong> x contenida en A. El conjunto <strong>de</strong> todos los puntosinteriores a A se <strong>de</strong>nota por A ◦ y se llama el interior <strong>de</strong> A.De la <strong>de</strong>finición anterior se concluye que A ◦ ⊂ A para todoA ⊂ X como también que si A y B son subconjuntos <strong>de</strong> X yA ⊂ B entonces A ◦ ⊂ B ◦ .El siguiente resultado caracteriza el interior <strong>de</strong> un conjunto y su<strong>de</strong>mostración es inmediata.2.7.2 Proposición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X. EntoncesA ◦ = ⋃ {U ⊂ X : U es un conjunto abierto y U ⊂ A}.En la siguiente proposición se resumen algunas <strong>de</strong> las más importantespropieda<strong>de</strong>s <strong>de</strong> la operación interior A ↦−→ A ◦ : P(X) −→P(X).2.7.3 Proposición. Sea X un espacio topológico.1. (A ◦ ) ◦ = A ◦ para cada A ⊂ X.2. (A ∩ B) ◦ = A ◦ ∩ B ◦ para cada A, B ⊂ X.51
3. A ⊂ X es abierto si y sólo si A ◦ = A.Demostración. La <strong>de</strong>mostración es consecuencia inmediata <strong>de</strong> la<strong>de</strong>finición.Tal como suce<strong>de</strong> con las operaciones <strong>de</strong> adherencia, dado unconjunto X y una función A ↦−→ A ◦ : P(X) −→ P(X) conciertas propieda<strong>de</strong>s, se pue<strong>de</strong> encontrar una topología sobre Xen la que el interior <strong>de</strong> cada subconjunto <strong>de</strong> X está <strong>de</strong>terminadopor la función. Este es el resultado que se presenta en la siguienteproposición.2.7.4 Proposición. Sea X un conjunto y supongamos que seha <strong>de</strong>finido una operación A ↦−→ A ◦ : P(X) −→ P(X) tal que1. A ◦ ⊂ A para cada A ⊂ X.2. (A ◦ ) ◦ = A ◦ para cada A ⊂ X.3. (A ∩ B) ◦ = A ◦ ∩ B ◦ para cada A, B ⊂ X.4. X ◦ = X.Existe una topología sobre X cuya operación <strong>de</strong> interior es precisamenteA ↦−→ A ◦ .En este caso se <strong>de</strong>finen los conjuntos abiertos como aquellosconjuntos que son iguales a su interior. La prueba <strong>de</strong> que estosconjuntos forman la topología buscada es sencilla y la omitiremosaquí.52
2.7.5 Ejemplos.1. En R con la topología usual, el interior <strong>de</strong>l intervalo [a, b] esel intervalo (a, b) pero NO siempre en un espacio métricoel interior <strong>de</strong> una bola cerrada B[x, ɛ] es la bola abiertaB(x, ɛ). Nuevamente la métrica discreta sobre un conjuntocon más <strong>de</strong> un punto nos ilustra este hecho.2. Consi<strong>de</strong>remos nuevamente R con la topología usual. Q ◦ =(R Q) ◦ = ∅. Nótese que (Q ◦ ∪ (R Q)) ◦ = R ◦ = R. Estees un ejemplo que muestra que pue<strong>de</strong> ocurrir (A ∪ B) ◦ ≠A ◦ ∪ B ◦ .Si A es un subconjunto <strong>de</strong> un espacio topológico X <strong>de</strong>cimos queel exterior <strong>de</strong> A es el interior <strong>de</strong>l complemento <strong>de</strong> A, esto es,(X A) ◦ . Los puntos <strong>de</strong> X que no están ni en interior ni en elexterior <strong>de</strong> A tienen una característica especial: cada vecindad<strong>de</strong> uno <strong>de</strong> estos puntos contiene tanto puntos <strong>de</strong> A como puntos<strong>de</strong> X A. Se tiene entonces la siguiente <strong>de</strong>finición.2.7.6 Definición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X. Un punto x ∈ X es un punto frontera <strong>de</strong> A sipara cada vecindad V se tiene V ∩A ≠ ∅ y V ∩(X A) ≠ ∅. Elconjunto <strong>de</strong> todos los puntos frontera <strong>de</strong> A se <strong>de</strong>nota por Fr Ay se llama la frontera <strong>de</strong> A.Nótese queFr A = A ∩ X Ay que la frontera <strong>de</strong> A es siempre un conjunto cerrado.53
El siguiente resultado muestra algunas relaciones entre la adherencia,el interior y la frontera.2.7.7 Proposición. Sean X un espacio topológico y A un subconjunto<strong>de</strong> X.1. A = A ∪ Fr A.2. A ◦ = A Fr A.3. X = A ◦ ∪ Fr A ∪ (X A) ◦ .Demostración.1. La inclusión A ∪ Fr A ⊂ A es inmediata. Sea x ∈ A. Six /∈ A, toda vecindad <strong>de</strong> x tiene puntos <strong>de</strong> A y puntos <strong>de</strong>su complemento (por lo menos a x). Entonces x ∈ A∪ Fr Ay A ∪ Fr A ⊂ A.2. Si x ∈ A ◦ entonces x ∈ A y x /∈ Fr A. Por otro lado six ∈ A Fr A entonces existe una vecindad <strong>de</strong> x contenidaen A, <strong>de</strong> don<strong>de</strong> x ∈ A ◦ .3. Si x /∈ A ◦ ∪ Fr A, existe una vecindad <strong>de</strong> x contenida enX A, <strong>de</strong> don<strong>de</strong> x ∈ A ◦ ∪ Fr A ∪ (X A) ◦ .2.7.8 Ejemplos.1. En R con topología usual, la frontera <strong>de</strong>l intervalo (a, b)(así como <strong>de</strong>l intervalo [a, b] o <strong>de</strong> cualquier otro intervalocon extremos a y b) es el conjunto {a, b}.54
2. En R con topología usual, la frontera <strong>de</strong> Q (y también <strong>de</strong>R Q) es R.3. Si X es un espacio topológico, Fr X =Fr ∅ = ∅.4. Cada subconjunto cerrado <strong>de</strong> R 2 es la frontera <strong>de</strong> algún subconjunto<strong>de</strong> R 2 . En efecto, si K es cerrado y K ◦ = ∅ entoncesFr K = K. En caso contrario sea F el conjunto <strong>de</strong>puntos <strong>de</strong> K con coor<strong>de</strong>nadas racionales unido con el conjunto<strong>de</strong> puntos aislados <strong>de</strong> K (x es un punto aislado <strong>de</strong> Ksi existe una vecindad V <strong>de</strong> x tal que V ∩ K = {x}). Setiene que Fr F = K.Ejercicios2.8. SubespaciosEn nuestro estudio <strong>de</strong> espacios métricos vimos que es posibleconvertir un subconjunto A <strong>de</strong> un espacio métrico (X, ρ) en unnuevo espacio métrico consi<strong>de</strong>rando la restricción <strong>de</strong> la función ρal conjunto A×A. Así por ejemplo, el conjunto Q <strong>de</strong> los númerosracionales “hereda” la estructura <strong>de</strong> espacio métrico usual <strong>de</strong>los números reales restringiendo la métrica usual, originalmente<strong>de</strong>finida en R×R, al conjunto Q×Q. En el nuevo espacio métricola bola abierta <strong>de</strong> radio ɛ > 0 centrada en un número racionalx es el conjunto {y ∈ Q : |x − y| < ɛ}. Observando con unpoco <strong>de</strong> atención, nos daremos cuenta <strong>de</strong> que este conjunto esprecisamente la intersección <strong>de</strong> la bola abierta en R <strong>de</strong> radio ɛy centrada en x, con el conjunto <strong>de</strong> los números racionales. En55
ealidad cada conjunto abierto en Q resulta ser la intersección<strong>de</strong> un conjunto abierto en R con los números racionales. En estesentido <strong>de</strong>cimos que la topología usual <strong>de</strong> Q es la “topologíaheredada” por Q <strong>de</strong> R.En general tenemos el siguiente resultado.2.8.1 Proposición. Sean (X, τ) un espacio topológico y A ⊂ X.La colección τ ′ = {O ∩ A : O ∈ τ} es una topología sobre A.Demostración. La <strong>de</strong>mostración <strong>de</strong> esta proposición se <strong>de</strong>duce<strong>de</strong> los siguientes hechos:1. ∅ ∩ A = ∅.2. X ∩ A = A3. (O 1 ∩ A) ∩ (O 2 ∩ A) = (O 1 ∩ O 2 ) ∩ A.4. Si {O j } j∈J es una colección <strong>de</strong> subconjuntos abiertos <strong>de</strong> Xentonces ⋃ (O j ∩ A) = ( ⋃ O j ) ∩ A.Estas observaciones dan lugar a la siguiente <strong>de</strong>finición.2.8.2 Definición. Sean (X, τ) un espacio topológico y A ⊂ X.La colección {O ∩ A : O ∈ τ} es la topología heredada por A<strong>de</strong> X o la topología inducida por X (o por la topología <strong>de</strong> X)sobre A. El espacio topológico formado se llama un subespacio<strong>de</strong> X.En a<strong>de</strong>lante, a menos que se explicite lo contrario, consi<strong>de</strong>raremoscada subconjunto <strong>de</strong> un espacio topológico X como un56
subespacio <strong>de</strong> X. Esto es, consi<strong>de</strong>raremos siempre que tiene latopología heredada <strong>de</strong> X.2.8.3 Ejemplos.1. La topología usual sobre cada subconjunto <strong>de</strong> R n es la topologíainducida por la topología usual <strong>de</strong> R n .2. Si (X, ρ) es un espacio métrico y A ⊂ X, la topología inducidasobre A es la topología generada por la restricción<strong>de</strong> ρ al conjunto A × A.3. La topología usual { <strong>de</strong> R induce } la topología discreta sobreel conjunto 1n : n ∈ N ; pero NO sobre el conjunto{ } 1n : n ∈ N ∪ {0}. La razón es que el conjunto {0} no esabierto en el subespacio.4. El eje x como subespacio <strong>de</strong>l Plano <strong>de</strong> Moore tiene la topologíadiscreta. En efecto, la intersección <strong>de</strong> un conjunto <strong>de</strong> la formaA ∪ {z}, don<strong>de</strong> A es una bola abierta usual <strong>de</strong>l plano,contenida en el semiplano superior y tangente al eje x enz, con el eje x es el conjunto {z}.5. Cualquier subespacio <strong>de</strong> un espacio discreto es discreto ycualquier subespacio <strong>de</strong> un espacio trivial es trivial.Una base para una topología sobre un conjunto X también <strong>de</strong>scribela topología <strong>de</strong> los subespacios <strong>de</strong> X como lo muestra elsiguiente resultado.57
2.8.4 Lema. Sean X un espacio topológico y A ⊂ X. Si Bes una base para la topología <strong>de</strong> X entonces la colección B A ={O ∩ A : O ∈ B} es una base para la topología inducida sobre A.Demostración. Es inmediato que cada elemento <strong>de</strong> B A es abiertoen A. Ahora bien, todo subconjunto abierto <strong>de</strong> A tiene la formaC ∩ A don<strong>de</strong> C es un subconjunto abierto <strong>de</strong> X. Si a ∈ C ∩ A yO es un abierto básico <strong>de</strong> X que contiene a A y está contenidoen C, entonces a ∈ O ∩ A y O ∩ A ⊂ C ∩ A.2.8.5 Ejemplo.La colección{∅} ∪ {[0, 1]} ∪ {[0, a) : 0 < a ≤ 1}∪ {(a, b) : 0 ≤ a < b ≤ 1} ∪ {(a, 1] : 0 ≤ a < 1}es una base para la topología usual <strong>de</strong>l intervalo [0, 1].El siguiente resultado resume algunas <strong>de</strong> las más importantespropieda<strong>de</strong>s <strong>de</strong> los subespacios.2.8.6 Proposición. Si A es un subespacio <strong>de</strong> un espacio topológicoX entonces:1. Un subconjunto F <strong>de</strong> A es cerado en A si y sólo si existeK cerrado en X tal que F = K ∩ A.2. Si E ⊂ A y <strong>de</strong>notamos por Adh A E la adherencia <strong>de</strong> Een A y por Adh X E la adherencia <strong>de</strong> E en X, entoncesAdh A E =Adh X E ∩ A.3. Si a ∈ A, entonces V es una vecindad <strong>de</strong> a en A si y sólosi existe una vecindad U <strong>de</strong> a en X tal que V = U ∩ A.58
4. Si a ∈ A y si B(a) es un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s<strong>de</strong> a en X, entonces {U ∩ A : U ∈ B(a)} es un sistemafundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> a en A.5. Si E ⊂ A y <strong>de</strong>notamos por Int A E el interior <strong>de</strong> E en A ypor Int X E el interior <strong>de</strong> E en X, entonces Int A E ⊃Int X E∩A.6. Si E ⊂ A y <strong>de</strong>notamos por Fr A E la frontera <strong>de</strong> E en A y porFr X E la frontera <strong>de</strong> E en X, entonces Fr A E ⊂Fr X E ∩ A.Ejercicios59
Capítulo 3Funciones continuasEn este capítulo estudiaremos las funciones continuas <strong>de</strong>finidasentre espacios topológicos, así como algunas <strong>de</strong> sus principalespropieda<strong>de</strong>s.3.1. Funciones continuasEn el Capítulo 1 utilizamos la noción <strong>de</strong> continuidad <strong>de</strong> funciones<strong>de</strong> R en R estudiada en Análisis Real para <strong>de</strong>finir funcionescontinuas entre espacios métricos. Vimos que si (X, d) y(Y, m) son espacios métricos, una función f : X −→ Y es continuaen un punto x 1 ∈ X si y sólo si para cada ɛ > 0 existeδ > 0 tal que d(x 1 , x 2 ) < δ implica m(f(x 1 ), f(x 2 )) < ɛ. Se diceque f es continua si es continua en cada punto x ∈ X.Una observación cuidadosa nos muestra que la función f : X −→Y es continua si y sólo si para cada subconjunto abierto O <strong>de</strong>Y , el conjunto f −1 (O) es abierto en X.Utilizaremos esta última propiedad para <strong>de</strong>finir lo que es unafunción continua entre dos espacios topológicos.60
3.1.1 Definición. Sean X y Y espacios topológicos. Una funciónf : X −→ Y es continua si f −1 (O) es un conjunto abiertoen X para cada conjunto abierto O <strong>de</strong> Y .Naturalmente también es posible <strong>de</strong>finir lo que significa que lafunción f : X −→ Y es continua en un punto x ∈ X.3.1.2 Definición. Sean X y Y espacios topológicos. Una funciónf : X −→ Y es continua en un punto x ∈ X si para cadavecindad V <strong>de</strong> f(x) en Y existe una vecindad U <strong>de</strong> x en X talque f(U) ⊂ V .De estas dos últimas <strong>de</strong>finiciones se concluye <strong>de</strong> manera inmediataque una función f : X −→ Y es continua si y sólo si f escontinua en x para cada x ∈ X.3.1.3 Ejemplos.1. Si f : X −→ Y es una función constante <strong>de</strong> valor k, entoncesf es continua. En efecto, si O es un subconjuntoabierto <strong>de</strong> Y entonces f −1 (O) es X o ∅, <strong>de</strong>pendiendo <strong>de</strong> sik es o no un elemento <strong>de</strong> O. En cualquier caso f −1 (O) esabierto en X.2. Si τ 1 y τ 2 son topologías <strong>de</strong>finidas sobre un conjunto Xy si τ 1 es más fina que τ 2 (esto es τ 2 ⊂ τ 1 ), entonces lafunción idéntica id X : (X, τ 1 ) −→ (X, τ 2 ) es continua. Encaso contrario, es <strong>de</strong>cir si existe un subconjunto O <strong>de</strong> X quepertenece a τ 2 pero no a τ 1 , entonces id −1X(O) no es abiertoen (X, τ 1 ). En este caso, aunque parezca sorpren<strong>de</strong>nte, lafunción idéntica no es continua.61
3. Si X es un espacio discreto, cualquier función con dominioX es continua.4. Si Y es un espacio grosero, es <strong>de</strong>cir si los únicos subconjuntoabiertos <strong>de</strong> Y son ∅ y el mismo Y , entonces toda funcióncon codominio Y es continua.3.1.4 Observación. Si (X, τ) y (Y, µ) son espacios topológicos,si f : X −→ Y y si B es una base para la topología <strong>de</strong> Y po<strong>de</strong>moshacer las siguientes observaciones:1. Si f es continua entonces f −1 (B) es abierto en X para cadaB ∈ B.2. De manera recíproca, si f −1 (B) es abierto en X para cadaB ∈ B y O es un subconjunto abierto <strong>de</strong> Y entoncesO = ⋃ i∈I B i para alguna familia {B i } i∈I <strong>de</strong> elementos <strong>de</strong>B, luegof −1 (O) = f −1 ( ⋃ i∈IB i )= ⋃ i∈I(f −1 B i )es abierto en X.Las observaciones anteriores nos permiten concluir que una funciónf : X −→ Y es continua si y sólo si la aplicación imagenrecíproca <strong>de</strong> f aplica elementos básicos <strong>de</strong> la topología <strong>de</strong> Y ensubconjuntos abiertos <strong>de</strong> X.62
3.1.5 Ejemplo. Consi<strong>de</strong>remos el intervalo [0, 1) con la topologíainducida <strong>de</strong> la topología usual <strong>de</strong> R y <strong>de</strong>notemos con C la circunferenciaen el plano complejo, con centro en el origen y radio1. Definamos la función f : [0, 1) −→ C por f(x) = e 2πix .Veamos que f es una función continua.El conjunto formado por todos los segmentos abiertos <strong>de</strong> la circunferenciaes una base para la topología <strong>de</strong> C. Si J es uno <strong>de</strong>tales segmentos y si J no contiene al número complejo 1, entoncesf −1 (J) es un intervalo abierto <strong>de</strong> la forma (a, b) don<strong>de</strong>0 < a < b < 1. Luego f −1 (J) es abierto en [0, 1). Por otraparte, si 1 ∈ J entonces f −1 (J) tiene la forma [0, a) ∪ (b, 1)don<strong>de</strong> 0 < a < b < 1 que también es un conjunto abierto en[0, 1). Se concluye que f es continua.El siguiente resultado nos da algunos criterios que permiten <strong>de</strong>cidirsi una función entre dos espacios topológicos es o no unafunción continua.3.1.6 Teorema. Sean X y Y espacios topológicos y f :−→ Yuna función. Las siguientes afirmaciones son equivalentes:63
1. f es continua.2. Si K es un subconjunto cerrado <strong>de</strong> Y , entonces f −1 (K) esun subconjunto cerrado <strong>de</strong> X.3. Si A ⊂ X, entonces f(A) ⊂ f(A).Demostración.1. → 2. Nótese que (f −1 (K)) c = f −1 (K c ). Así, si K es cerradoen Y , K c es abierto; y como f es continua, f −1 (K c ) es abiertoen X, o lo que es lo mismo, f −1 (K) es cerado.2. → 3. Sea A ⊂ X. Se tiene que f −1 (f(A)) es un subconjuntocerrado <strong>de</strong> X y A ⊂ f −1 (f(A)), entonces A ⊂ f −1 (f(A)) estoimplica que f(A) ⊂ f(A).3. → 1. Sea O un subconjunto abierto <strong>de</strong> Y . Nótese en primerlugar queX X f −1 (O) ⊂ f −1 (O).Por otro lado, si x ∈ X f −1 (O), entonces f(x) ∈ f(X f −1 (O)),luego f(x) ∈ f(X f −1 (O)) lo cual es imposible si x ∈ f −1 (O);la razón <strong>de</strong> esta afirmación es que x ∈ f −1 (O) implica que O esuna vecindad <strong>de</strong> f(x) que claramente no tiene puntos en comúncon f(X f −1 (O)).Hemos <strong>de</strong>mostrado queEsto completa la prueba.f −1 (O) ⊂ X X f −1 (O).El siguiente resultado es supremamente importante; ya que nosólo facilita gran cantidad <strong>de</strong> cálculos, sino que, en estudios posteriores,permite presentar a los espacios topológicos con las funcionescontinuas como una categoría.64
3.1.7 Teorema. Si f : X −→ Y y g : Y −→ Z son funcionescontinuas entonces la compuesta g ◦ f : X −→ Z también esuna función continua.Demostración. Si O es un subconjunto abierto <strong>de</strong> Z, la continuidad<strong>de</strong> g implica que g −1 (O) es abierto en Y ; y como fes continua, f −1 (g −1 (O) es un subconjunto abierto <strong>de</strong> X. Laigualdad(g ◦ f) −1 (O) = f −1 (g −1 (O)concluye la prueba <strong>de</strong>l teorema.3.1.8 Observación. Observe que si f : X −→ Y es una funcióncontinua y si A es un subespacio <strong>de</strong> X, entonces la restricciónf ↾ A <strong>de</strong> f a A también es una función continua. A<strong>de</strong>más, si Yes un subespacio <strong>de</strong> Z entonces f : X −→ Y es continua si ysólo si f es continua cuando se le consi<strong>de</strong>ra <strong>de</strong>finida <strong>de</strong> X enZ.Veamos ahora cómo es posible concluir que una función es continuasi se sabe que sus restricciones a ciertos subespacios <strong>de</strong> sudominio son continuas.3.1.9 Proposición. Si {A α } α∈Λ es cualquier familia <strong>de</strong> subconjuntosabiertos <strong>de</strong> X cuya unión es X, entonces una funciónf : X −→ Y es continua si y sólo si su restricción a cada A α escontinua.Demostración. Es inmediato que si f es continua, f ↾ Aα es continuapara cada α ∈ Λ.De manera recíproca, sea O un subconjunto abierto <strong>de</strong> Y . Paracada α ∈ Λ el conjunto f ↾ −1A α(O) = f −1 (O) ∩ A α es abierto en65
A α ; pero como A α es abierto en X, entonces f −1 (O)∩A α tambiénes abierto en X. Ahora bien, f −1 (O) = ⋃ α∈Λ f −1 (O)∩A α , luegof −1 (O) es abierto y f es continua.Si los elementos <strong>de</strong> la colección {A α } α∈Λ no son conjuntos abiertos,es posible que no se pueda concluir la continuidad <strong>de</strong> lafunción f. Por ejemplo la función f : R −→ R <strong>de</strong>finida por{0 si x ∈ Qf(x) =1 si x /∈ Q.no es continua en ningún punto <strong>de</strong> R aunque su restricción acada subconjunto unitario <strong>de</strong> R sí lo es.La anterior observación muestra que f pue<strong>de</strong> no ser continuaaunque cada elemento <strong>de</strong> la familia {A α } α∈Λ tenga la propiedad<strong>de</strong> ser un conjunto cerrado y f ↾ Aα sea continua para cada α ∈ Λ.Un resultado análogo al presentado en la proposición 3.1.9 setiene cuando {A α } α∈Λ es una colección finita <strong>de</strong> subconjuntoscerrados <strong>de</strong> X.3.1.10 Proposición. Si {A i } i=1,...,n es una familia finita <strong>de</strong> subconjuntoscerrados <strong>de</strong> X cuya unión es X, entonces una funciónf : X −→ Y es continua si y sólo si su restricción a cada A i escontinua.Demostración. Nuevamente, si f : X −→ Y es continua, entoncessu restricción a cada A i es continua.Sea K un subconjunto cerrado <strong>de</strong> Y . Para cada i = 1, ..., n elconjunto f ↾ −1A i(K) = f −1 (K) ∩ A i es cerrado en A i ; pero comoA i es cerrado en X, entonces f −1 (K) ∩ A i también es cerrado en66
X. Ahora bien, f −1 (K) = ⋃ i=1,...,n f −1 (K) ∩ A i , luego f −1 (K)es cerrado y f es continua.La condición <strong>de</strong> finitud <strong>de</strong> la familia {A i } i=1,...,n dada en laproposición anterior se pue<strong>de</strong> <strong>de</strong>bilitar un poco si se tiene encuenta la siguiente <strong>de</strong>finición.3.1.11 Definición. Una familia <strong>de</strong> subconjuntos <strong>de</strong> un espaciotopológico es localmente finita si cada punto <strong>de</strong>l espacio tieneuna vecindad que tiene puntos en común con sólo un númerofinito <strong>de</strong> elementos <strong>de</strong> la familia.3.1.12 Ejemplo. La colección <strong>de</strong> todos los intervalos <strong>de</strong> la forma(n, n + 1) con n ∈ N es una familia localmente finita <strong>de</strong>subconjuntos <strong>de</strong> R, mientras que la colección <strong>de</strong> todos los intervalosabiertos en R no lo es.Tenemos el siguiente resultado.3.1.13 Proposición. Si {A α } α∈Λ es una familia localmente finita<strong>de</strong> subconjuntos cerrados <strong>de</strong> X cuya unión es X, entonces unafunción f : X −→ Y es continua si y sólo si su restricción acada A α es continua.Demostración. Como en los casos anteriores, si f es continua,f ↾ Aα es continua para cada α ∈ Λ.Recíprocamente, sea x ∈ X y sean O una vecindad abierta <strong>de</strong>f(x) y V una vecindad abierta <strong>de</strong> x que tiene puntos en comúnsólo con un número finito <strong>de</strong> elementos <strong>de</strong> la familia {A α } α∈Λ .Digamos que V ∩ A αi ≠ ∅ para i = 1, ..., n y que V ∩ A α = ∅ siα ≠ α i para cada i = 1, ..., n.67
Dado i ∈ {1, ..., n} consi<strong>de</strong>remos B i = V ∩ A αi . La colección{B i } i=1,...,n es una familia finita <strong>de</strong> subconjuntos cerrados <strong>de</strong> Vcuya unión es V y como la restricción <strong>de</strong> f ↾ V a B i es continuapara cada i = 1, ..., n, entonces la proposición 3.1.10 garantizaque la función f ↾ V es continua. Esto garantiza que existe unavecindad abierta W en V tal que f ↾ V (W ) ⊂ O. Esta contenenciaimplica que f es continua en x porque W es una vecindad <strong>de</strong>x en X, ya que V es abierto en X y a<strong>de</strong>más f(W ) = f ↾ V (W ).Puesto que x fue escogido <strong>de</strong> manera arbitraria, se concluye quef es una función continua.Ejercicios3.2. Homeomorfismos e inmersionesConsi<strong>de</strong>remos la función f : (− π 2 , π ) −→ R <strong>de</strong>finida por f(x) =2tan −1 x. Es bien sabido que la función f es continua, uno a unoy sobreyectiva, a<strong>de</strong>más, que su inversa, la co-restricción <strong>de</strong> lafunción tangente al intervalo (− π 2 , π ), también es una función2continua. Esta función f con estas características nos permitepasar <strong>de</strong>l espacio topológico (− π 2 , π ) al espacio topológico R2sin per<strong>de</strong>r información alguna. En otras palabras, gracias a lafunción f, conocemos la topología <strong>de</strong> uno <strong>de</strong> los espacios unavez conocemos la topología <strong>de</strong>l otro.En el fondo, aunque los dos espacios son en apariencia distintos,son el mismo espacio. Los conjuntos abiertos, cerrados, lasadherencias, los interiores o los puntos <strong>de</strong> acumulación en uno68
<strong>de</strong> los espacios tienen su contraparte en el otro y la función fes el puente para pasar <strong>de</strong> uno <strong>de</strong> los espacios al otro. Diremosque el intervalo (− π 2 , π ) y el espacio R son homeomorfos y que2la función f es un homeomorfismo.En general tenemos la siguiente <strong>de</strong>finición.3.2.1 Definición. Sean X y Y espacios topológicos. Una funciónf : X −→ Y es un homeomorfismo si f es continua, unoa uno y sobreyectiva y f −1 también es continua.Si existe un homeomorfismo f : X −→ Y <strong>de</strong>cimos que losespacios X y Y son homeomorfos.Es inmediato que una función continua f : X −→ Y es unhomeomorfismo si y sólo si existe una función continua g : Y −→X tal que g ◦ f =id X y f ◦ g =id Y , don<strong>de</strong> id X y id Y son lasfunciones i<strong>de</strong>ntidad <strong>de</strong> X y Y , respectivamente.Nótese que la condición <strong>de</strong> que f −1 sea continua es equivalentea afirmar que f es una función abierta, esto es, que aplica conjuntosabiertos en conjuntos abiertos, o a afirmar que f es unafunción cerrada, es <strong>de</strong>cir, que aplica conjuntos cerrados en conjuntoscerrados.En resumen, una función f : X −→ Y es un homeomorfismo sies uno a uno, sobre, continua y abierta (o cerrada).Con esta observación en mente resulta ser un fácil ejercicio <strong>de</strong>mostrarel siguiente resultado.3.2.2 Proposición. Si X y Y son espacios topológicos y f :X −→ Y es una función uno a uno y sobreyectiva, entonces lassiguientes afirmaciones son equivalentes:69
1. f es un homeomorfismo.2. Si A ⊂ X, entonces f(A) es abierto en Y si y sólo si A esabierto en X.3. Si K ⊂ X, entonces f(K) es cerrado en Y si y sólo si Kes cerrado en X.4. Si M ⊂ X, entonces f(M) = f(M).3.2.3 Observación. La relación ∼ <strong>de</strong>finida en los espacios topológicospor X ∼ Y si y sólo si X y Y son homeomorfos es unarelación <strong>de</strong> equivalencia. Esto justifica el hecho <strong>de</strong> que veamosdos espacios topológicos homeomorfos como el mismo espacio.La relación “ser homeomorfos” nos permite conocer un espaciotopológico por sus características relevantes (aquellas que lohacen único) y no por los nombres <strong>de</strong> sus elementos.Cuando en la observación anterior hablamos <strong>de</strong> “característicasrelevantes” <strong>de</strong> un espacio nos estamos refiriendo a las propieda<strong>de</strong>stopológicas <strong>de</strong>l espacio. Una propiedad topológica es aquella quesi la posee un espacio X, la posee también cualquier espaciohomeomorfo a X.Que los conjuntos unitarios <strong>de</strong> un espacio topológico sean conjuntoscerrados es un ejemplo <strong>de</strong> una propiedad topológica.Si f : X −→ Y es una función continua y uno a uno y sif −1 : f(X) −→ X también es continua entonces X y f(X)son homeomorfos. En este caso <strong>de</strong>cimos que la función f es unainmersión <strong>de</strong> X en Y o que X está inmerso en Y . En términosprácticos, po<strong>de</strong>mos pensar en X como un subespacio <strong>de</strong> Y .70
La inclusión <strong>de</strong> un subespacio en un espacio topológico es elejemplo más inmediato que se pue<strong>de</strong> presentar <strong>de</strong> una inmersión.Ejercicios71
Capítulo 4Topologías iniciales yTopologías finalesEn este capítulo estudiaremos estructuras iniciales como los espaciosproducto y estructuras finales como los espacios cociente.4.1. Estructuras iniciales - Topología inicialSean X un conjunto, {X α } α∈Λ una familia <strong>de</strong> espacios topológicosy para cada α ∈ Λ sea f α : X −→ X α una función. Si consi<strong>de</strong>ramosla topología discreta sobre el conjunto X cada una <strong>de</strong>las funciones f α resulta ser continua.Nuestro propósito ahora es dotar al conjunto X <strong>de</strong> la topologíamenos fina para la cual cada f α es una función continua.Si f α es continua, entonces para cada subconjunto abierto O <strong>de</strong>X α el conjunto fα −1 (O) <strong>de</strong>be ser un subconjunto abierto <strong>de</strong> X.Entonces la colecciónS = {f −1α (O) : α ∈ Λ y O es abierto en X α }<strong>de</strong>be estar contenida en la topología <strong>de</strong>l espacio X.72
La colección B <strong>de</strong> todas las intersecciones finitas <strong>de</strong> elementos<strong>de</strong> S es una base para una topología sobre X y claramente siconsi<strong>de</strong>ramos la topología generada por B sobre X, entonces f αes una función continua para cada α ∈ Λ.4.1.1 Definición. La topología generada por la base B es latopología inicial sobre X inducida por la familia {f α } α∈Λ .El siguiente resultado caracteriza las funciones continuas quetienen como codominio un espacio con una topología inicial.4.1.2 Teorema. Si X tiene la topología inicial inducida por unafamilia <strong>de</strong> funciones {f α } α∈Λ , don<strong>de</strong> f α : X −→ X α , entoncesuna función f : Y −→ X es continua si y sólo si f α ◦ f escontinua para cada α ∈ Λ.Demostración. Es inmediato que si f es continua, entonces f α ◦fes continua para cada α ∈ Λ.Supongamos la continuidad <strong>de</strong> f α ◦ f para cada α ∈ Λ. Puestoque X tiene la topología inicial inducida por la familia {f α } α∈Λ ,un conjunto abierto sub-básico <strong>de</strong> X tiene la forma fα−1 (O) paraalgún α ∈ Λ y algún subconjunto abierto O <strong>de</strong> X α . Se tiene quef −1 (fα−1 (O)) = (f α ◦ f) −1 (O) es abierto en Y , porque f α ◦ f escontinua.4.1.3 Observación. Sea τ una topología sobre X tal que cadaf α es continua y <strong>de</strong>notemos por X ′ el espacio (X, τ). Puestoque f α ◦id X : X ′ −→ X α es continua para cada α ∈ Λ, se tiene73
que la aplicación idéntica id X : X ′ −→ X es continua y estosólo se tiene si τ es más fina que la topología inicial sobre Xinducida por la familia {f α } α∈Λ . La topología inicial es entoncesla topología menos fina con la que se pue<strong>de</strong> dotar al conjunto X,<strong>de</strong> manera tal que cada función f α resulte ser continua.4.1.4 Ejemplos.1. Si Y tiene la topología grosera entonces la topología inicialsobre un conjunto X inducida por una función f : X −→ Yes la topología grosera.2. Si Y tiene la topología discreta entonces la topología inicialsobre un conjunto X inducida por una función uno a unof : X −→ Y es la topología discreta.Ejercicios4.2. Topología ProductoLa posibilidad <strong>de</strong> construir estructuras iniciales <strong>de</strong>scrita en lasección anterior, nos permite dotar al producto cartesiano <strong>de</strong>una familia <strong>de</strong> espacios topológicos <strong>de</strong> una topología que resultaser muy útil en distintos contextos.74
4.2.1 Definición. Sean X y Y dos espacios topológicos y consi<strong>de</strong>remosla topología inicial sobre el producto cartesiano X×Yinducida por las proyecciones canónicas π 1 : X × Y −→ X yπ 2 : X × Y −→ Y . Llamamos a esta topología la topologíaproducto sobre X × Y .Los conjuntos <strong>de</strong> la forma π1 −1 (A) ∩ π−1 2 (B) don<strong>de</strong> A y B sonsubconjuntos abiertos <strong>de</strong> X y Y , respectivamente, forman unabase para la topología <strong>de</strong>finida sobre X × Y .Ahora bien, si A y B son subconjuntos abiertos <strong>de</strong> X y Y , respectivamente,entonces π1 −1 (A) ∩ π−1 2 (B) = A × B. Así, la topologíaproducto sobre X × Y se pue<strong>de</strong> <strong>de</strong>scribir como la topología generadapor los conjuntos <strong>de</strong> la forma A × B don<strong>de</strong> A y B sonsubconjuntos abiertos <strong>de</strong> X y Y , respectivamente.75
4.2.2 Observación. En general, si X 1 , X 2 ,...,X n son espaciostopológicos, la topología producto sobre X 1 × X 2 ×, ..., ×X nes la topología inicial inducida por las funciones π i : X 1 ×X 2 ×, ..., ×X n −→ X i , i = 1, ..., n; y una base para esta topologíaestá dada por los conjuntos <strong>de</strong> la forma A 1 ×A 2 ×, ..., ×A n , don<strong>de</strong>A i es un subconjunto abierto <strong>de</strong> X i para cada i = 1, ..., n.4.2.3 Ejemplos.1. La topología usual <strong>de</strong> R 2 es la topología producto sobre R ×R.2. La topología usual <strong>de</strong> R n es la topología producto sobre elproducto cartesiano R n .3. El producto <strong>de</strong> una familia finita <strong>de</strong> espacios métricos es unespacio métrico.Ejercicios4.3. Productos arbitrariosConsi<strong>de</strong>remos ahora una familia arbitraria {X α } α∈Λ <strong>de</strong> espaciostopológicos. Recor<strong>de</strong>mos que un elemento x <strong>de</strong>l productocartesiano ∏ α∈Λ X ⋃α es una función x : Λ −→ ˙ Xα tal quex(α) = x α ∈ X α , para cada α ∈ Λ.Para cada α ∈ Λ, la proyección canónica π α : ∏ α∈Λ X α −→ X αestá <strong>de</strong>finida por π α (x) = x α .76
4.3.1∏Definición. Definimos la topología producto sobreα∈Λ X α como la topología inicial inducida por la familia{π α } α∈Λ <strong>de</strong> proyecciones canónicas.Consi<strong>de</strong>remos la colecciónS = {π −1α (O) : α ∈ Λ y O es abierto en X α }y recor<strong>de</strong>mos que la familia B <strong>de</strong> todas las intersecciones finitas<strong>de</strong> elementos <strong>de</strong> S es una base para la topología producto.Entonces, un conjunto abierto básico tiene la forma⋂i=1,...,nπ −1α i(O αi ) = {x ∈ ∏ α∈ΛX α : x αi ∈ O αi para todo i = 1, ..., n}= ∏ α∈ΛA α don<strong>de</strong> A α es abierto en X α para todo α ∈ Λ,A αi = O αi , i = 1, ..., n y A α = X α si α ≠ α i , i = 1, ..., n.Así, un conjunto abierto básico <strong>de</strong> la topología producto es unproducto <strong>de</strong> subespacios abiertos <strong>de</strong> los espacios originales, en elcual cada factor es igual al espacio total, salvo para un númerofinito <strong>de</strong> índices.Trabajaremos ahora con espacios topológicos que tienen unapropiedad especial: Si x y y son puntos distintos <strong>de</strong>l espacio,existe una vecindad V <strong>de</strong> x tal que y /∈ V , o existe una vecindadW <strong>de</strong> y tal que x /∈ W . En otras palabras, dados dos puntosdistintos <strong>de</strong>l espacio, existe una vecindad <strong>de</strong> alguno <strong>de</strong> los dospuntos, que no contiene al otro.77
Hay una gran cantidad <strong>de</strong> ejemplos <strong>de</strong> espacios con esta propiedad:cualquier espacio métrico la tiene, así como cualquier conjuntocon la topología <strong>de</strong> compementos finitos o cualquier conjuntototalmente or<strong>de</strong>nado con la topología <strong>de</strong> las colas a la <strong>de</strong>recha.Por supuesto también existe espacios sin esta propiedad, comolos conjuntos con más <strong>de</strong> un punto y topología grosera.Los espacios tales que dados dos puntos distintos <strong>de</strong>l espacio,existe una vecindad <strong>de</strong> alguno <strong>de</strong> los dos puntos, que no contieneal otro, están inmersos en productos <strong>de</strong> espacios <strong>de</strong> Sierpinskicomo lo muestra el siguiente ejemplo.4.3.2 Ejemplo.Sea X = {0, 1} el espacio <strong>de</strong> Sierpinski. La topología sobre esteespacio es {∅, {0}, {0, 1}}. Consi<strong>de</strong>remos un espacio topológico(X, τ) tal que dados dos puntos distintos <strong>de</strong>l espacio, existe unavecindad <strong>de</strong> alguno <strong>de</strong> los dos puntos que no contiene al otroy tomemos el espacio producto ∏ A∈τ) X A, don<strong>de</strong> X A = C paracada A ∈ τ.⋃Para cada x ∈ X <strong>de</strong>finimos la función α(x) = ̂x : τ −→ ˙A∈τ X Apor{0 si x ∈ Âx(A) =1 si x /∈ A.Veamos que la función α : X −→ ∏ A∈τ X A es una inmersión.Es <strong>de</strong>cir que es una función continua, abierta sobre su imageny uno a uno.1. Sea A ∈ τ y O un subconjunto abierto <strong>de</strong> X A . Entonces{α −1 (πA −1 (O)) = A si O = {0}X si O = {0, 1}.78
En cualquier caso, α −1 (πA −1 (O)) es un conjunto aberto enel espacio <strong>de</strong> Sierpinski, luego α es continua.2. Sea A un subconjunto abierto <strong>de</strong> X. Se tiene = {̂x : x ∈ A}= π −1A ({0}),entonces α es una función abierta. En particular, es abiertasobre su imagen.3. Sean x y y elementos distintos <strong>de</strong> X. Por hipótesis, existeuna vecindad abierta V <strong>de</strong> uno <strong>de</strong> los puntos, digamos <strong>de</strong> x,que no contiene al otro. Es <strong>de</strong>cir y /∈ V. Entonces ŷ(V ) = 1y ̂x(V ) = 0. Se concluye que ̂x ≠ ŷ y que α es uno a uno.En el ejemplo anterior resultó indispensable que el espacio topológicoX tuviera una propiedad especial para que fuera posiblesumergirlo, por medio <strong>de</strong> la aplicación α, en un producto <strong>de</strong>espacios <strong>de</strong> Sierpinski. Esta es una operación que no se pue<strong>de</strong>realizar con todo espacio topológico.El siguiente ejemplo muestra cómo, sorpren<strong>de</strong>ntemente, todo espaciotopológico es un subespacio <strong>de</strong> un producto <strong>de</strong> espacios <strong>de</strong>tres puntos.4.3.3 Ejemplo. Consi<strong>de</strong>remos el conjunto C = {0, 1, 2} conla topología {∅, {0}, C}. Llamaremos al espacio topológico Cel espacio <strong>de</strong> Sierpinski <strong>de</strong> tres puntos.Sea (X, τ) un espacio topológico cualquiera y consi<strong>de</strong>remos elespacio producto ∏ A∈P(X) C A, don<strong>de</strong> C A = C para cada A ∈P(X).79
Para⋃cada x ∈ X <strong>de</strong>finimos la función σ(x) = ̂x : P(X) −→˙A∈P(X) C A por⎧⎪⎨ 0 si x ∈ A ◦̂x(A) = 1 si x ∈ F rA ∩ A⎪⎩2 si x /∈ A.Veamos que la función σ : X −→ ∏ A∈P(X) C A es una inmersión.Con este fin veamos que σ es una función continua, abiertay uno a uno.1. Sea A ∈ P(X) y O un subconjunto abierto <strong>de</strong> C A . Entonces{σ −1 (πA −1 (O)) = A ◦ si O = {0}X si O = {0, 1, 2},luego σ es continua.2. Sea A un subconjunto abierto <strong>de</strong> X. Se tiene = {̂x : x ∈ A}= π −1A ({0}),entonces σ es una función abierta.3. Sean x y y elementos distintos <strong>de</strong> X. Como y /∈ A = {x}se tiene que ŷ(A) = 2 y ̂x(A) = 0 o ̂x(A) = 1 <strong>de</strong>pendiendo<strong>de</strong> si A es o no abierto en X. Entonces ̂x ≠ ŷ y σ es uno auno.Ejercicios80
4.4. Estructuras finales - Topología finalSean Y un conjunto, {(X α , τ α )} α∈Λ una familia <strong>de</strong> espacios topológicosy para cada α ∈ Λ sea f α : X α −→ Y una función. Siconsi<strong>de</strong>ramos la topología grosera sobre el conjunto Y cada una<strong>de</strong> las funciones f α resulta ser continua.Ahora <strong>de</strong>seamos encontrar la topología más fina que se pue<strong>de</strong><strong>de</strong>finir sobre el conjunto Y , <strong>de</strong> tal manera que f α sea continuapara cada α ∈ Λ.Definamos tentativamente la colección τ como la colección <strong>de</strong>todos los subconjuntos A <strong>de</strong> Y tales que fα−1 A es abierto en X αpara cada α ∈ Λ. Esto esτ = {A ⊂ Y : fα−1 A ∈ τ α para cada α ∈ Λ}.Es un ejercicio sencillo <strong>de</strong>mostrar que τ es una topología sobreY y que f α es continua para cada α ∈ Λ.4.4.1 Definición. Llamaremos a τ la topología final sobre Yinducida por la familia {f α } α∈Λ .4.4.2 Ejemplo. Sean (X i ) i∈I una familia <strong>de</strong> espacios topológicosdisjuntos dos a dos, X = ⋃ i∈I X i y j i X i −→ X la inyeccióncanónica <strong>de</strong> X i en X. La colección A constituida por los conjuntosA ⊂ X tales que para cada i ∈ I, A ∩ X i es un conjuntoabierto en X i , es una topología sobre X. Teniendo en cuentaque ji−1 (A) = A ∩ X i , A resulta ser la topología más fina sobre81
X tal que para cada i ∈ I, las inyecciones canónicas son continuas.Esta topología es conocida con el nombre <strong>de</strong> topologíasuma sobre X.Supongamos que X tiene la topología suma. Una condición necesariay suficiente para que una función f : X −→ Y sea continuaes que la función compuesta f ◦ j i sea continua para cadai ∈ I. En efecto, dado B subconjunto subconjunto abierto <strong>de</strong>Y , f −1 (B) es abierto en X, si y solamente si, f −1 (B) ∩ X i =ji −1 (f −1 (B)) = (f ◦ j i ) −1 (B) es abierto en X i , para cada i ∈ I,es <strong>de</strong>cir, f ◦ j i es continua para cada i ∈ I.En particular, si (Y i ) i∈I es otra familia <strong>de</strong> espacios topológicosdisjuntos dos a dos cuya unión es Y , y si para cada i ∈ I,la aplicación f i : X i −→ Y i es continua, entonces la aplicaciónf : X −→ Y tal que f(x) = f i (x) si x ∈ X i es también continua.En efecto, para cada i ∈ I, f◦j i = k i ◦f i , don<strong>de</strong> k i es la aplicacióncanónica <strong>de</strong> Y i en Y . Se obtiene así la continuidad <strong>de</strong> las f ◦ j i ypor en<strong>de</strong> la <strong>de</strong> f. Si los f i son homeomorfismos se concluye quef es un homeomorfismo <strong>de</strong> X sobre Y .El siguiente resultado muestra una característica muy importante<strong>de</strong> los espacios dotados <strong>de</strong> una topología final, que yahicimos notar en el ejemplo anterior.4.4.3 Teorema. Supongamos que Y tiene la topología final inducidapor la familia <strong>de</strong> funciones {f α : X α −→ Y } α∈Λ . Unafunción f : Y −→ Z es continua si y sólo si f ◦ f α es continuapara cada α ∈ Λ.Demostración. Es inmediato que si f es continua, entonces f ◦f αes continua para cada α ∈ Λ.82
De manera recíproca, Si O es un subconjunto abierto <strong>de</strong> Z,entonces f −1 (O) es abierto en Y , porque fα−1 (f −1 (O)) es abiertoen X α para cada α ∈ Λ.4.4.4 Observación. Si τ ′ es una topología sobre Y tal que f αes continua para cada α ∈ Λ y si <strong>de</strong>notamos por Y ′ al espacioformado por el conjunto Y junto con la topología τ ′ , entonces elteorema anterior garantiza que la aplicación idéntica <strong>de</strong> Y en Y ′es continua. Esto significa que τ ′ es menos fina que la topologíafinal sobre Y .4.5. Topología cocienteEjerciciosConsi<strong>de</strong>remos un espacio topológico X y una relación <strong>de</strong> equivalencia∼ <strong>de</strong>finida sobre X. Como es costumbre, <strong>de</strong>notaremospor [x] la clase <strong>de</strong> equivalencia <strong>de</strong> un elemento x ∈ X y porX/ ∼ el conjuunto <strong>de</strong> todas las clases <strong>de</strong> equivalencia. Esto es,X/ ∼= {[x] : x ∈ X}.La función canónica q : X −→ X/ ∼ <strong>de</strong>finida por q(x) = [x]induce la topología final sobre el cociente X/ ∼. El espacioasí <strong>de</strong>finido recibe el nombre <strong>de</strong> espacio cociente y la topologíafinal se llama también topología cociente.83
4.5.1 Ejemplos.1. Sea X = {(x, y) ∈ R 2 : −1 ≤ x ≤ 1 y 0 ≤ y ≤ 1} consi<strong>de</strong>radocomo subespacio <strong>de</strong>l plano. Definimos la relación <strong>de</strong>equivalencia ∼ sobre X <strong>de</strong> la siguiente manera:(x 0 , y 0 ) ∼ (x 1 , y 1 ) si y sólo sia) x 0 = x 1 y y 0 = y 1 , ob) x 0 = ±1, x 1 = −x 0 y y 1 = 1 − y 0 .El espacio cociente que se obtiene al dotar al conjunto X/ ∼<strong>de</strong> la topología cociente se conoce como cinta <strong>de</strong> Moëbius.2. Consi<strong>de</strong>remos la relación <strong>de</strong> equivalencia ∼ sobre el planoR 2 <strong>de</strong>finida por(x 0 , y 0 ) ∼ (x 1 , y 1 ) si y sólo si x 2 0 + y 2 0 = x 2 1 + y 2 1.Observando con un poco <strong>de</strong> atención notaremos que dosputos <strong>de</strong>l plano están relacionados mediante ∼, si y sólo sise encuentran a la misma distancia <strong>de</strong>l origen. Entonces, la84
clase <strong>de</strong> equivalencia <strong>de</strong> un punto (x 0 , y 0 ) está formada porlos puntos <strong>de</strong> la circunferencia centrada en el origen y quepasa por el punto (x 0 , y 0 ). Sean X = R 2 /∼, π : R 2 −→ Xla aplicación canónica y consi<strong>de</strong>remos la topología cocientesobre X.Veamos √ que la función f : X −→ R <strong>de</strong>finida por f[(x 0 , y 0 )] =x20 + y0 2 es una inmersión.i. En primer lugar, nótese que la manera como está <strong>de</strong>finidala relación ∼ implica, no sólo que f está bien <strong>de</strong>finida,sino que es uno a uno.ii. Ahora veamos que f es continua. Para esto consi<strong>de</strong>remosun intervalo abierto (a, b) en R. Para verificar quef −1 (a, b) es un conjunto abierto en X, <strong>de</strong>bemos comprobarque π −1 (f −1 (a, b)) es abierto en R 2 . Analizaremostres casos:a. si a < b ≤ 0, entonces π −1 (f −1 (a, b)) = ∅,b. si a < 0 < b, entonces π −1 (f −1 (a, b)) es el interior<strong>de</strong>l círculo <strong>de</strong> radio b centrado en el origen yc. si a ≤ 0 < b, entonces π −1 (f −1 (a, b)) es la coronaabierta limitada por las circunferencias centradasen el origen, <strong>de</strong> radios a y b.Este análisis permite concluir que f es una funcióncontinua.iii. Ahora consi<strong>de</strong>remos un conjunto A abierto en X. Porla <strong>de</strong>finición <strong>de</strong> la topología cociente π −1 (A) es un conjuntoabierto en el plano. Si a ∈ f(A), existe un puntoz en el plano tal que [z] ∈ A y f[z] = a. Comoz ∈ π −1 (A), existe ɛ > 0 tal que la bola <strong>de</strong> radio ɛ85
centrada en z está contenida en π −1 (A). Se tiene que(a−ɛ, a+ɛ) ⊂ f(A). Concluimos que f es una funciónabierta.4.5.2 Observación. Consi<strong>de</strong>remos una función f : X −→ Y .La relación R f <strong>de</strong>finida sobre X por x R f y si y sólo si f(x) =f(y) es una relación <strong>de</strong> equivalencia. En efecto,1. f(x) = f(x) para cada x ∈ X, luego R f es reflexiva.2. Si f(x) = f(y) entonces f(y) = f(x), <strong>de</strong> don<strong>de</strong> R f essimétrica.3. Si f(x) = f(y) y f(y) = f(z) entonces f(x) = f(z), portanto R f es transitiva.4.5.3 Definición. Sean X y Y espacios topológicos y f :X −→ Y una función sobreyectiva. Si Y tiene la topología finalinducida por f entonces f se llama una aplicación cociente.El término “aplicación cociente”queda ampliamente justificadocon el siguiente resultado.4.5.4 Proposición. Si f : X −→ Y es una aplicación cociente,entonces Y y X/R f son homeomorfos.Demostración. Consi<strong>de</strong>remos la función ϕ : X/R f −→ Y <strong>de</strong>finidapor ϕ([x]) = f(x).1. Si [x] = [y] entonces f(x) = f(y), luego ϕ es una funciónbien <strong>de</strong>finida.86
2. Si ϕ([x]) = ϕ([y]), entonces f(x) = f(y), <strong>de</strong> don<strong>de</strong> [x] = [y],por lo tanto ϕ es uno a uno.3. Puesto que f es sobreyectiva, dado y ∈ Y existe x ∈ X talque f(x) = y. Entonces ϕ([x]) = y y ϕ es sobreyectiva.4. Si q es la aplicación canónica <strong>de</strong>finida <strong>de</strong> X en X/R f entoncesϕ ◦ q = f y como f es continua y X/R f tiene latopología final inducida por q, se concluye que ϕ es unafunción continua.5. Nótese que A = ϕ −1 (ϕ(A)) para cada A ⊂ X/R f . Así, siA es abierto en X/R f , entonces ϕ(A) es abierto en Y . Seconcluye que ϕ es una función abierta.Se ha <strong>de</strong>mostrado que ϕ es un homeomorfismo.Ejercicios87
Capítulo 5Propieda<strong>de</strong>s <strong>de</strong> Separación ypropieda<strong>de</strong>s <strong>de</strong> enumerabilidadEstudiaremos ahora una serie <strong>de</strong> propieda<strong>de</strong>s <strong>de</strong> los espaciostopológicos que nos permiten establecer qué tan “cercanos” oqué tan “separados” están unos puntos <strong>de</strong>l espacio <strong>de</strong> otros.5.1. Espacios T 0 y espacios T 1En el capítulo anterior vimos cómo los espacios topológicos concierta propiedad especial podían sumergirse en un producto <strong>de</strong>espacios <strong>de</strong> Sierpinski. La propiedad que se pedía era que dadosdos puntos distintos <strong>de</strong>l espacio, existiera una vecindad <strong>de</strong> alguno<strong>de</strong> los puntos que no contuviera al otro. Los espacios conesta propiedad serán nuestro primer objeto <strong>de</strong> estudio en estecapítulo.5.1.1 Definición. Un espacio topológico X es T 0 si dados x yy puntos distintos <strong>de</strong>l espacio, existe una vecindad V <strong>de</strong> x talque y /∈ V , o existe una vecindad W <strong>de</strong> y tal que x /∈ W .88
5.1.2 Ejemplos.1. El espacio <strong>de</strong> Sierpinski, X = {0, 1} con la topología{∅, {0}, {0, 1}}, es un espacio T 0 . Los únicos puntos distintosentre sí son 0 y 1; y {0} es una vecindad <strong>de</strong> 0 queno contiene a 1.2. Sea d una seudométrica sobre un conjunto X. La funciónd es una métrica si y sólo si el espacio topológico generadoes T 0 . En efecto, si d es una métrica y x, y son puntosdistintos <strong>de</strong> X, entonces d(x, y) > 0, luego la bola abiertaB (x, d(x, y)) es una vecindad <strong>de</strong> x que no contiene a y. Demanera recíproca, si X es T 0 y x, y son puntos distintos<strong>de</strong> X, entonces existe una vecindad <strong>de</strong> uno <strong>de</strong> los puntos,digamos <strong>de</strong> x, que no contiene al otro. Esto significa queexiste ɛ > 0 tal que y /∈ B(x, ɛ), lo cual a su vez implicaque d(x, y) ≥ ɛ > 0.3. Cualquier conjunto X con la topología <strong>de</strong> complementosfinitos es un espacio T 0 .4. Cualquier conjunto X totalmente or<strong>de</strong>nado, con la topología<strong>de</strong> las colas a la <strong>de</strong>recha es un espacio T 0 .5. Si X es un conjunto con más <strong>de</strong> un punto y topología grosera,entonces X no es un espacio T 0 .6. Si Y es un subespacio <strong>de</strong> un espacio T 0 , entonces Y tambiénes un espacio T 0 . En efecto, si x y y son puntos distintos <strong>de</strong>Y , existe una vecindad V <strong>de</strong> uno <strong>de</strong> los puntos, digamos <strong>de</strong>x, en X, tal que y /∈ V . Se tiene que V ∩Y es una vecindad<strong>de</strong> x en Y y y /∈ V ∩ Y .89
7. Sea (X i ) i∈I una familia <strong>de</strong> espacios topológicos no vacíos.El producto X = ∏ i∈I X i es un espacio T 0 si y sólo si X ies un espacio T 0 para cada i ∈ I. En efecto, si X es T 0 , sij ∈ I y si a y b son puntos distintos <strong>de</strong> X j , escogemos x yy en X <strong>de</strong> tal manera que x i = y i para cada i ≠ j, x j = a yy j = b. Entonces x y y son puntos distintos <strong>de</strong> X y por serX un espacio T 0 , existe una vecindad básica V <strong>de</strong> uno <strong>de</strong>los puntos, digamos <strong>de</strong> x, en X, tal que y /∈ V . EntoncesV tiene la forma V = ⋂ α=1,...,n π−1 i α(O iα ), don<strong>de</strong> O iα es unavecindad <strong>de</strong> x iα para cada α = 1, ..., n. Puesto que x y ydifieren únicamente en la j-ésima coor<strong>de</strong>nada, j = i α paraalgún α ∈ {1, ..., n}. Entonces O iα es una vecindad <strong>de</strong> x iα =a en X j , que no contiene a b. De manera recíproca, si X ies un espacio T 0 para dada i ∈ I y si x y y son puntosdistintos <strong>de</strong>l producto ∏ i∈I X i, existe j ∈ I tal que x j ≠ y j .Puesto que X j es un espacio T 0 , existe una vecindad O j <strong>de</strong>uno <strong>de</strong> los puntos, digamos <strong>de</strong> x j , en X j , tal que y j /∈ O j .Entonces πj−1 (O j ) es una vecindad <strong>de</strong> x que no contiene ay. De esta manera queda <strong>de</strong>mostrado que X es un espacioT 0 .Supongamos que (X, d) es un espacio métrico. Puesto que X conla topología generada por la métrica es un espacio T 0 , dadosdos puntos distintos x y y <strong>de</strong> X, existe una vecindad <strong>de</strong> uno<strong>de</strong> los puntos, que no contiene al otro. En un ejemplo anteriormostramos que y /∈ B(x, d(x, y)). Pero po<strong>de</strong>mos afirmar aúnmás: existe también una vecindad <strong>de</strong> y que no contiene a x.En efecto, x /∈ B(y, d(x, y)). Estudiaremos ahora los espaciostopológicos que tienen esta propiedad.90
5.1.3 Definición. Un espacio topológico X es un espacio T 1si para cada par x, y <strong>de</strong> puntos distintos <strong>de</strong> X existen unavecindad V <strong>de</strong> x y una vecindad W <strong>de</strong> y, tales que y /∈ V yx /∈ W .5.1.4 Ejemplos.1. Todo espacio métrico es un espacio T 1 .2. Cualquier conjunto con la topología <strong>de</strong> los complementosfinitos (resp. contables) es un espacio T 1 .3. Todo espacio discreto es T 1 .4. El plano <strong>de</strong> Moore es un espacio T 1 .5. El plano ranurado es un espacio T 1 .Es inmediato que todo espacio T 1 es también un espacio T 0 .Existen, no obstante, espacios T 0 que no son T 1 , como por ejemploel espacio <strong>de</strong> Sierpinski.La mayor importancia <strong>de</strong> los espacios T 1 radica en que elloscaracterizan a los espacios en los cuales los conjuntos unitariosson conjuntos cerrados, como lo muestra parte <strong>de</strong>l siguienteresultado.5.1.5 Proposición. Sea X un espacio topológico. Las siguientesafirmaciones son equivalentes:1. X es T 1 .91
2. Para cada x ∈ X, el conjunto {x} es cerrado.3. Cada subconjunto <strong>de</strong> X es la intersección <strong>de</strong> los conjuntosabiertos que lo contienen.Demostración.1. =⇒ 2. Si X es T 1 , si x ∈ X y si y ≠ x, existe una vecindad V<strong>de</strong> y que no contiene a x. Esto <strong>de</strong>muestra que X {x} esabierto y, por lo tanto, que {x} es cerrado.2. =⇒ 3. Si A ⊂ X, se tiene que A = ⋂ x∈XA X {x}.3. =⇒ 1. Sean x y y puntos distintos <strong>de</strong> X. Como {x} es la intersección<strong>de</strong> los conjuntos abiertos que contienen a x, existe unconjunto abierto que contiene a x y no contiene a y. De lamisma forma, existe un conjunto abierto que contiene a yy no contiene a x.Ejercicios5.2. Espacios <strong>de</strong> Hausdorff - T 2Hemos visto que si (X, d) es un espacio métrico y si x y y sonpuntos distintos <strong>de</strong> X, entonces B(x, d(x, y)) es una vecindad<strong>de</strong> x que no contiene a y y B(y, d(x, y)) es una vecindad <strong>de</strong> yque no contiene a x. En ambos casos hemos consi<strong>de</strong>rado d(x, y)92
como el radio <strong>de</strong> las vecinda<strong>de</strong>s escogidas, en realidad esta distanciaes el mayor radio posible para construir vecinda<strong>de</strong>s <strong>de</strong>cada uno <strong>de</strong> los puntos que no contengan al otro. Sin embargo,cualquier número real positivo menor que d(x, y) serviría paranuestros propósitos. Si en particular consi<strong>de</strong>ramos un númerod(x, y)positivo r ≤ entonces B(x, r) es una vecindad <strong>de</strong> x que2no contiene a y, B(y, r) es una vecindad <strong>de</strong> y que no contiene ax y a<strong>de</strong>más estas vecinda<strong>de</strong>s tienen la propiedad adicional <strong>de</strong> nocontener puntos en común. En otras palabras, dos puntos distintos<strong>de</strong> un espacio métrico se pue<strong>de</strong>n “separar” con vecinda<strong>de</strong>sabiertas disyuntas. En esta sección estudiaremos los espacios quetienen esta misma propiedad.5.2.1 Definición. Un espacio topológico X es un espacio <strong>de</strong>Hausdorff, o T 2 , si para cada x y cada y en X, con x ≠ y,existen V y W vecinda<strong>de</strong>s <strong>de</strong> x y y respectivamente, <strong>de</strong> talmanera que V ∩ W = ∅.Los espacios <strong>de</strong> Hausdorff se acostumbran también a llamar espaciosseparados.5.2.2 Ejemplos.1. Todos los espacios métricos son espacios <strong>de</strong> Hausdorff.2. Cualquier subespacio <strong>de</strong> un espacio <strong>de</strong> Hausdorff es un espacio<strong>de</strong> Hausdorff.3. Dada una familia (X i ) i∈I <strong>de</strong> espacios topológicos no vacíos,el producto ∏ i∈I X i es un espacio <strong>de</strong> Hausdorff si y sólo siX i es un espacio <strong>de</strong> Hausdorff para cada i ∈ I.93
Es inmediato que todo espacio <strong>de</strong> Hausdorff es también un espacioT 1 . Sin embargo, no todo espacio T 1 es un espacio <strong>de</strong>Hausdorff. Por ejemplo, si τ es la topología <strong>de</strong> los complementosfinitos sobre un conjunto infinito X, entonces X es un espacioT 1 que no es un espacio <strong>de</strong> Hausdorff, puesto que en este espaciono existen dos conjuntos abiertos no vacíos que sean disyuntos.Las funciones continuas no preservan la propiedad <strong>de</strong> ser un espacio<strong>de</strong> Hausdorff. Es <strong>de</strong>cir, existen funciones continuas <strong>de</strong>finidas<strong>de</strong> un espacio <strong>de</strong> Hausdorff en un espacio que no lo es. Si X tienemás <strong>de</strong> un punto, la aplicación idéntica <strong>de</strong>finida <strong>de</strong> X, con latopología discreta, en X, con la topología grosera, es un ejemploque ilustra esta situación.Aún así, las funciones continuas satisfacen propieda<strong>de</strong>s importantesen presencia <strong>de</strong> espacios <strong>de</strong> Hausdorff. Una <strong>de</strong> ellas semuestra en la siguiente proposición.5.2.3 Proposición. Si f : X −→ Y es una función continuay Y es un espacio <strong>de</strong> Hausdorff, entonces el conjunto K ={(x 1 , x 2 ) : f(x 1 ) = f(x 2 )} es cerrado en X × X.Demostración. Si (x 1 , x 2 ) /∈ K, entonces f(x 1 ) ≠ f(x 2 ). ComoY es un espacio <strong>de</strong> Hausdorff, existen vecinda<strong>de</strong>s abiertas U yV <strong>de</strong> f(x 1 ) y f(x 2 ) respectivamente, <strong>de</strong> tal manera que U ∩V = ∅. La continuidad <strong>de</strong> f garantiza que f −1 (U) y f −1 (V ) sonvecinda<strong>de</strong>s abiertas <strong>de</strong> x 1 y x 2 respectivamente; y se tiene quef −1 (U) × f −1 (V ) es una vecindad abierta <strong>de</strong> (x 1 , x 2 ) en X × X,contenida en el complemento <strong>de</strong> K.La recíproca <strong>de</strong> la proposición anterior no es siempre cierta. Sif : X −→ Y es una función constante entonces el conjunto94
K = {(x 1 , x 2 ) : f(x 1 ) = f(x 2 )} = X × X es cerrado, in<strong>de</strong>pendientemente<strong>de</strong> si Y es o no un espacio <strong>de</strong> Hausdorff. Sinembargo, se tiene el siguiente resultado.5.2.4 Proposición. Si f es una función abierta <strong>de</strong> X sobre Yy si el conjunto K = {(x 1 , x 2 ) : f(x 1 ) = f(x 2 )} es cerrado enX × X, entonces Y es un espacio <strong>de</strong> Hausdorff.Demostración. Sean y 1 y y 2 puntos distintos <strong>de</strong> Y . Puesto quef es sobreyectiva, existen x 1 y x 2 en X tales que f(x 1 ) = y 1 yf(x 2 ) = y 2 . <strong>Clara</strong>mente (x 1 , x 2 ) /∈ K, luego existen vecinda<strong>de</strong>sabiertas U y V <strong>de</strong> x 1 y x 2 respectivamente, <strong>de</strong> tal manera queU × V ⊂ (X × X) K. Como f es abierta, f(U) y f(V ) sonvecinda<strong>de</strong>s abiertas <strong>de</strong> y 1 y y 2 respectivamente, y se tiene f(U)∩f(V ) = ∅.Las dos proposiciones anteriores dan una <strong>de</strong>mostración inmediata<strong>de</strong>l siguiente resultado, el cual es una caracterización <strong>de</strong> losespacios <strong>de</strong> Hausdorff.5.2.5 Proposición. El espacio topológico X es un espacio <strong>de</strong>Hausdorff si y sólo si la diagonal ∆ = {(x, x) : x ∈ X} escerrada en X × X.Ejercicios95
5.3. Espacios regulares y Espacios T 3En esta sección estudiaremos espacios topológicos en los quela topología <strong>de</strong>l espacio permite separar conjuntos cerrados <strong>de</strong>puntos fuera <strong>de</strong> ellos.5.3.1 Definición. Un espacio topológico X es un espacio regularsi para cada K subconjunto cerrado <strong>de</strong> X y cada x ∈ X K,existen conjuntos U y V abiertos en X, tales que K ⊂ U, x ∈ Vy U ∩ V = ∅.5.3.2 Ejemplo.Consi<strong>de</strong>remos sobre R la topología τ para la cual las vecinda<strong>de</strong>sbásicas <strong>de</strong> x son los intervalos <strong>de</strong> la forma [x, y) con y > x.Si K es cerrado en (R, τ) y x /∈ K, existe y > x tal que U =[x, y) ⊂ R K. Para cada z ∈ K, con z < x, sea V z = [z, x)y para cada z ∈ K, con z ≥ y, sea V z = [z, z + 1). El conjuntoV = ⋃ z∈K V z es abierto, contiene a K y U ∩ V = ∅. Entonces(R, τ) es regular.Nótese que el hecho <strong>de</strong> que sea posible separar con conjuntosabiertos, puntos <strong>de</strong> conjuntos cerrados, no implica que se puedanseparar dos puntos distintos <strong>de</strong>l espacio, utilizando conjuntosabiertos disyuntos. Es <strong>de</strong>cir, un espacio regular no siempre es unespacio <strong>de</strong> Hausdorff, como lo muestran los siguientes ejemplos.5.3.3 Ejemplos.96
1. Sea X un conjunto dotado con la topología grosera. EntoncesX es un espacio regular, puesto que no existen unconjunto cerrado K en X y un punto <strong>de</strong> X fuera <strong>de</strong> K queno se puedan separar con conjuntos abiertos disyuntos. Porotro lado, a menos que X no tenga más <strong>de</strong> un punto, X noes un espacio <strong>de</strong> Hausdorff.2. Consi<strong>de</strong>remos R con la topología τ = {∅, Q, R Q, R}.Entonces (R, τ) es un espacio regular que no es un espacio<strong>de</strong> Hausdorff.Para que un espacio regular X sea un espacio <strong>de</strong> Hausdorff esnecesario y suficiente que los subconjuntos unitarios <strong>de</strong>l espaciosean conjuntos cerrados. En otras palabras, un espacio regulares un espacio <strong>de</strong> Hausdorff si y sólo si es T 1 . Los espacios que sonsimultáneamente regulares y T 1 reciben un tratamiento especial.5.3.4 Definición. Un espacio topológico es T 3 si es regular yT 1 .Ahora tenemos que todo espacio T 3 es también un espacio T 2 .Sin embargo, existen espacios <strong>de</strong> Hausdorff que no son espaciosregulares y por lo tanto, que no son T 3 .5.3.5 Ejemplo. Sea τ la topología usual sobre el conjunto <strong>de</strong> losnúmeros reales y τ∗ = τ ∪ {Q ∪ U : U ∈ τ}. Se tiene que τ∗ esuna topología sobre R y que (R, τ∗) es un espacio <strong>de</strong> Hausdorffque no es regular.La siguiente proposición nos provee <strong>de</strong> dos caracterizaciones <strong>de</strong>los espacios regulares.97
5.3.6 Proposición. Sea X un espacio topológico. Las siguientesafirmaciones son equivalentes.1. X es un espacio regular.2. Si U es un subconjunto abierto <strong>de</strong> X y x ∈ U, entoncesexiste un subconjunto abierto V <strong>de</strong> X tal que x ∈ V yV ⊂ U.3. Cada punto <strong>de</strong> X posee un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>scerradas.Demostración.1. =⇒ 2. Si X es regular, si U ⊂ X es abierto y si x ∈ U, entoncesexisten subconjuntos abiertos V y W <strong>de</strong> X, <strong>de</strong> tal maneraque V ∩ W = ∅, x ∈ V y X U ⊂ W . Sea y ∈ V . Se tieneque y /∈ W ; <strong>de</strong> lo contrario W sería una vecindad <strong>de</strong> y sinpuntos en común con V . Entonces y /∈ X U, luego y ∈ U.Se concluye que V ⊂ U.2. =⇒ 3. Si x ∈ X y O es una vecindad abierta <strong>de</strong> x, existe unsubconjunto abierto V <strong>de</strong> X tal que x ∈ V y V ⊂ O. Elconjunto V es una vecindad cerrada <strong>de</strong> x contenida en O.3. =⇒ 1. Si K es cerrado en X y x /∈ K, entonces existe una vecindadcerrada M <strong>de</strong> x tal que M ⊂ X K. Sean U una vecindadabierta <strong>de</strong> x contenida en M y V = X M. Se tiene quex ∈ U, K ⊂ V y U ∩ V = ∅. Esto prueba que X es unespacio regular.98
Ejercicios5.4. Espacios completamente regulares y Espacios<strong>de</strong> TychonoffHasta ahora hemos estudiado la posibilidad <strong>de</strong> que dos puntosdistintos <strong>de</strong> un espacio topológico, o un conjunto cerrado y unpunto fuera <strong>de</strong>l conjunto, se puedan separar utilizando conjuntosabiertos disyuntos. En esta sección veremos que hay espaciostopológicos en los que un conjunto cerrado y un punto fuera<strong>de</strong>l conjunto se pue<strong>de</strong>n separar utilizando una función continua<strong>de</strong>finida <strong>de</strong>l espacio en un intervalo cerrado en R.5.4.1 Ejemplo. Sea (X, m) un espacio métrico, K un subconjuntocerrado <strong>de</strong> X y x ∈ X K. Hemos <strong>de</strong>finido la distanciam(y, K) <strong>de</strong> un punto y ∈ X al conjunto K como el ínfimo<strong>de</strong> las distancias <strong>de</strong> y a los puntos <strong>de</strong> K, en otras palabrasm(y, K) = inf{m(y, k) : k ∈ K}.Consi<strong>de</strong>remos la métrica d <strong>de</strong>finida en X pord(y, z) = mín{m(y, z), m(x, K)}.La función d es una métrica sobre X equivalente a m (nóteseque m(x, K) > 0); y en la Proposición 1.2.3 se <strong>de</strong>mostró lacontinuidad <strong>de</strong> la función y ↦−→ d(y, K) : X −→ R, luego lacorrestricción f <strong>de</strong> esta función al intervalo [0, m(x, K)] tambiénes continua. A<strong>de</strong>más, f(k) = 0 para todo k ∈ K y f(x) =m(x, K) > 0.En este sentido, la función continua f nos permitió separar elpunto x <strong>de</strong>l conjunto cerrado K.99
La siguiente <strong>de</strong>finición caracteriza los espacios topológicos quetienen esta propiedad <strong>de</strong> separación.5.4.2 Definición. Un espacio topológico X es completamenteregular si para cada conjunto K cerrado en X y cada x ∈ X K, existe una función continua f <strong>de</strong>finida <strong>de</strong> X en el intervalo[0, 1] <strong>de</strong> R, tal que f(K) = 0 y f(x) = 1.Es <strong>de</strong> anotar que el intervalo [0, 1] se pue<strong>de</strong> reemplazar porcualquier intervalo cerrado [a, b] <strong>de</strong> R. En este caso se pediránlas condiciones f(K) = a y f(x) = b.De manera inmediata aparece el siguiente resultado.5.4.3 Proposición. Si X es un espacio completamente regular,entonces X es regular.Demostración. Sean K cerrado en X y x ∈ X K. Existeuna función continua f : X −→ ([ [0, 1] tal que f(K) = 0 yf(x) = 1. Los conjuntos f −1 0, 1 )) (( ]) 1y f −122 , 1 son([abiertos en X, son disyuntos y a<strong>de</strong>más K ⊂ f −1 0, 1 ))y2x ∈ f −1 (( 12 , 1 ]).La recíproca <strong>de</strong> esta proposición no es cierta. Existen espaciosregulares que no son completamente regulares. A<strong>de</strong>más, al igualque suce<strong>de</strong> con los espacios regulares, los espacios completamenteregulares no necesariamente son espacios <strong>de</strong> Hausdorff, a100
menos que cada conjunto unitario en el espacio sea un conjuntocerrado. Esto es, a menos que a<strong>de</strong>más, el espacio sea T 1 .5.4.4 Definición. Un espacio topológico X es un espacio <strong>de</strong>Tychonoff o T 32 si es completamente regular y T 1.5.4.5 Ejemplos.1. Todo espacio métrico es un espacio <strong>de</strong> Tychonoff.2. Sea τ la topología sobre R en la cual las vecinda<strong>de</strong>s básicas<strong>de</strong> cada número real x ≠ 0 son los intervalos abiertos usualescentrados en x mientras que las vecinda<strong>de</strong>s básicas <strong>de</strong> 0son los conjuntos <strong>de</strong> la forma (−ɛ, ɛ) ∪ (−∞, −n) ∪ (n, ∞),don<strong>de</strong> ɛ > 0 y n es un entero positivo. El espacio (R, τ) esun espacio <strong>de</strong> Tychonoff.3. El plano <strong>de</strong> Moore es un espacio <strong>de</strong> Tychonoff.Algunas <strong>de</strong> las más notables propieda<strong>de</strong>s <strong>de</strong> los espacios completamenteregulares y <strong>de</strong> los espacios <strong>de</strong> Tychonoff se resumenen la siguiente proposición.5.4.6 Proposición.1. Cada subespacio <strong>de</strong> un espacio completamente regular (resp.<strong>de</strong> un espacio <strong>de</strong> Tychonoff) es completamente regular. (resp.<strong>de</strong> Tychonoff).101
2. Un producto no vacío <strong>de</strong> espacios topológicos es completamenteregular (resp. <strong>de</strong> Tychonoff) si y sólo si cada factores un espacio completamente regular (resp. un espacio <strong>de</strong>Tychonoff).Ejercicios5.5. Espacios normalesEn las secciones anteriores estudiamos espacios topológicos enlos que se pue<strong>de</strong>n separar puntos distintos o puntos <strong>de</strong> conjuntoscerrados, utilizando conjuntos abiertos o funciones continuas.En los espacios topológicos que estudiaremos ahora, es posibleseparar dos conjuntos cerrados disyuntos.5.5.1 Definición. Un espacio topológico X es un espacio normalsi dados F y K subconjuntos <strong>de</strong> X cerrados y disyuntos,existen subconjuntos abiertos U y V <strong>de</strong> X tales que F ⊂ U,K ⊂ V y U ∩ V = ∅. Un espacio es T 4 si es normal y T 1 .Veamos algunos ejemplos.5.5.2 Ejemplos.1. Todo espacio seudométrico es normal. En efecto, si (X, d)es un espacio seudométrico y A y B son subconjuntos cerradosy disyuntos <strong>de</strong> X, entonces para cada a ∈ A existe ɛ a >0 tal que B(a, ɛ a ) ∩ B = ∅ y para cada b ∈ B existe δ b > 0102
tal que B(b, δ b ) ∩ A = ∅. El conjunto U = ⋃ a∈A B(a, ɛ a3 ) esabierto y contiene a A y el conjunto V = ⋃ b∈B B(b, δ b3 ) esabierto y contiene a B. Ahora bien, si z ∈ U ∩ V entoncesexisten a ∈ A y b ∈ B <strong>de</strong> tal manera que d(a, z) < ɛ a3 yd(z, b) < δ b3 . Supongamos que ɛ a ≥ δ b (en caso contrario, elrazonamiento es análogo). Se tiene que d(a, b) ≤ ɛ a3 + δ b3 x. El espacio (R, τ) es normal.5. Cualquier producto <strong>de</strong> intervalos cerrados y acotados en Rse llama un cubo. En un capítulo posterior veremos quetodo cubo es un espacio normal.Si un espacio normal no es T 1 , es posible que no se puedan separarpuntos <strong>de</strong> conjuntos cerrados. En otras palabras, un espacionormal pue<strong>de</strong> no ser un espacio regular.103
5.5.3 Ejemplo.Vimos que R con la topología <strong>de</strong> colas a <strong>de</strong>recha es un espacionormal. Por otro lado, si x 0 ∈ R, entonces todo conjunto abiertoque contenga al conjunto cerrado (−∞, x 0 − 1] contiene tambiéna x 0 . Esto muestra que el espacio no es regular.El siguiente lema <strong>de</strong>bido a F. B. Jones permite <strong>de</strong>terminar queciertos espacios carecen <strong>de</strong> la propiedad <strong>de</strong> normalidad.5.5.4 Lema. (Jones) Si X contiene un subconjunto <strong>de</strong>nso D yun subespacio cerrado y relativamente discreto S tal que |S| >2 |D| , entonces X no es normal.5.5.5 Observación.1. Un subespacio S <strong>de</strong> X es relativamente discreto si la topologíaque hereda <strong>de</strong> X es la topología discreta.2. Si A es un conjunto, <strong>de</strong>notamos con |A| el cardinal <strong>de</strong> A.5.5.6 Ejemplo.El Plano <strong>de</strong> Moore, Γ, no es un espacio normal. Sean D ={(x, y) ∈ Γ : x, y ∈ Q} y S el eje x. Se tiene que D es <strong>de</strong>nsoen Γ, S es cerrado y relativamente discreto, |S| = c y D es unconjunto contable. Entonces |S| > 2 |D| .Los espacios normales no poseen, en general, las propieda<strong>de</strong>s quemencionamos para espacios con otras propieda<strong>de</strong>s <strong>de</strong> separación,como lo muestran los siguientes ejemplos.104
5.5.7 Ejemplos.1. El Plano <strong>de</strong> Moore es un espacio que no es normal. Sin embargo,el plano <strong>de</strong> Moore, por ser un espacio <strong>de</strong> Tychonoff,es un subespacio <strong>de</strong> un cubo (ver ejercicio 8. <strong>de</strong> la sección5.4), que sí es un espacio normal. Entonces, NO todo subespacio<strong>de</strong> un espacio normal es normal.2. Sea X el conjunto R <strong>de</strong> números reales con la topología τpara la cual las vecinda<strong>de</strong>s básicas <strong>de</strong> x son los intervalos <strong>de</strong>la forma [x, y) con y > x. Hemos dicho que X es un espacionormal. Sin embargo, X × X no es normal. Es <strong>de</strong>cir, elproducto <strong>de</strong> espacios normales NO siempre es un espacionormal.Ejercicios5.6. El Lema <strong>de</strong> Urysohn y el Teorema <strong>de</strong>Extensión <strong>de</strong> TietzeEntre los espacios regulares y los espacios completamente regulareshay una diferencia. En los espacios regulares un conjuntocerrado y un punto fuera <strong>de</strong>l conjunto, se pue<strong>de</strong>n separar utilizandoconjuntos abiertos disyuntos, mientras que en los espacioscompletamente regulares, esta separación se pue<strong>de</strong> hacerpor medio <strong>de</strong> una función continua <strong>de</strong>finida <strong>de</strong>l espacio en elintervalo cerrado [0, 1]. En esta sección veremos la relación entrela normalidad <strong>de</strong>l espacio X y la existencia <strong>de</strong> funcionesf : X −→ [0, 1] continuas que separen conjuntos no vacíos,cerrados y disyuntos.105
En los espacios métricos tenemos el siguiente resultado:5.6.1 Proposición. Sea (X, d) un espacio métrico y sean Ay B dos subconjuntos <strong>de</strong> X no vacíos, cerrados y disyuntos.Existe una función continua f : X −→ [0, 1] tal que f(A) = 0,f(B) = 1.Demostración. La función f : X −→ [0, 1] <strong>de</strong>finida por f(x) =d(x, A)es continua y a<strong>de</strong>más para cada x ∈ A se tiened(x, A) + d(x, B)d(x, A)que f(x) =d(x, A) + d(x, B) = 0y para cada x ∈ B,0 + d(x, B)d(x, A) d(x, A)se tiene que f(x) ==d(x, A) + d(x, B) d(x, A) + 0 = 1.Nuestros estudios previos, junto con el resultado anterior muestranque en los espacios métricos los conjuntos no vacíos, cerradosy disyuntos se pue<strong>de</strong>n separar utilizando tanto conjuntosabiertos disyuntos, como funciones continuas. El siguiente lemacaracteriza los espacios que gozan <strong>de</strong> la misma propiedad.5.6.2 Lema. Lema <strong>de</strong> Urysohn. Un espacio topológico (X, τ)es normal si y sólo si para cada A y B <strong>de</strong> subconjuntos <strong>de</strong> Xno vacíos, cerrados y disyuntos, existe una función continua f :X −→ [0, 1] tal que f(A) = 0 y f(B) = 1.Demostración. Supongamos inicialmente que X es normal y queA y B son subconjuntos <strong>de</strong> X no vacíos, cerrados y disyuntos.Para cada número racional en [0, 1] <strong>de</strong> la forma p 2 n, don<strong>de</strong> p yn son números naturales y 0 < p < 2 n , construimos el conjuntoU p2 n <strong>de</strong> la siguiente manera: 106
1. El conjunto U 1 es un conjunto abierto en X tal que A ⊂ U 1 2 2y U 1 ∩ B = ∅. Tal conjunto existe por la normalidad <strong>de</strong> X.22. Puesto que A y X U 12disyuntos y a<strong>de</strong>más U 12son conjuntos no vacíos, cerrados yy B son también no vacíos, cerradostales quey disyuntos, existen conjuntos abiertos U 14 y U 3 4A ⊂ U 14 , U 1 4 ⊂ U 1 2 , U 1 2 ⊂ U 3 4 , y U 3 4 ∩ B = ∅.3. Ahora supongamos que se han <strong>de</strong>finido conjuntos U k2 n , k =1, ..., 2 n − 1 <strong>de</strong> tal manera queA ⊂ U 1 , ..., U ⊂ U , ..., U k−12n 2 n k2 n 2n −1 ∩ B = ∅.2 nLa normalidad <strong>de</strong> X garantiza que se pue<strong>de</strong> continuar con elproceso y encontrar conjuntos U , para k = 1, ..., k2n+1 −12con las mismas propieda<strong>de</strong>s. De manera n+1 inductiva, se tieneque para cada número racional r <strong>de</strong> la forma r = k 2n, paraalgún n > 0 y k = 1, ..., 2 n − 1 (un número racional <strong>de</strong>esta forma se llama racional diádico), se pue<strong>de</strong> construirun conjunto abierto U r <strong>de</strong> tal manera que:a) A ⊂ U r y U r ∩ B = ∅ para cada racional diádico r,b) U r ⊂ U s siempre que r < s.4. Definimos la función f : X −→ [0, 1] <strong>de</strong> la siguiente manera:⎧⎪⎨ 1 si x /∈ U r para cada racionalf(x) =diádico r,⎪⎩inf{r : x ∈ U r } en caso contrario.5. Veamos que f es una función continua. Sea x ∈ X.107
a) Si f(x) = 1, entonces x /∈ U r para cada racional diádicor. Sea ɛ > 0 y r un racional diádico tal que 1−ɛ < r < 1(tal r existe porque el conjunto <strong>de</strong> números racionalesdiádicos es <strong>de</strong>nso en [0, 1]). Si y ∈ X U r , entoncesse tiene 1 − ɛ < r ≤ f(y) ≤ 1. Esto <strong>de</strong>muestra lacontinuidad <strong>de</strong> f en x.b) Si f(x) = 0, si ɛ > 0 y si r es un racional diádico talque 0 < r < ɛ, entonces x ∈ U r y para cada y ∈ U r setiene que 0 ≤ f(y) ≤ r < ɛ. Entonces f es continua enx.c) Si 0 < f(x) < 1 y si ɛ > 0, existen racionales diádicosr < s, tales que f(x) − ɛ < r < f(x) < s < f(x) + ɛ yx ∈ U s U r . Si y ∈ U s U r , entonces f(x) − ɛ < r
5.6.3 Definición. Sean A ⊂ X y f : A −→ Y una función. Lafunción F : X −→ Y es una extensión <strong>de</strong> f si y sólo si paracada a ∈ A, f(a) = F (a).No siempre es posible encontrar extensiones <strong>de</strong> funciones continuas.Por ejemplo la función f : (0, 1] −→ R <strong>de</strong>finida porf(x) = sin( 1 x) es una función continua que no se pue<strong>de</strong> exten<strong>de</strong>ral intervalo [0, 1].El siguiente teorema caracteriza los espacios en los que siemprees posible exten<strong>de</strong>r a todo el espacio, funciones continuas<strong>de</strong>finidas en un subespacio cerrado.5.6.4 Teorema. Extensión <strong>de</strong> Tietze. Un espacio topológico Xes un espacio normal si y sólo si para cada subespacio cerradoL <strong>de</strong> X y cada función continua f : L −→ [a, b], existe unaextensión continua F : X −→ [a, b] <strong>de</strong> f.Aquí, nuevamente en el lugar <strong>de</strong>l intervalo cerrado [a, b] se pue<strong>de</strong>utilizar cualquier intervalo cerrado. En la prueba <strong>de</strong>l Teoremautilizaremos el intervalo [−1, 1].Demostración. Supongamos que X es normal, que L es un subespaciocerrado <strong>de</strong> X y que f : L −→ [−1, 1] es una funcióncontinua.Consi<strong>de</strong>remos los conjuntos cerrados y disyuntos([A 0 = f −1 −1, − 1 ])3109
yB 0 = f −1 ([ 13 , 1 ]).Por el lema <strong>de</strong> Urysohn existe una función continua f 1 : X −→[−1/3, 1/3] tal que f 1 (A 0 ) = − 1 3 y f 1(B 0 ) = 1 , luego para cada3x ∈ L, |f(x) − f 1 (x)| ≤ 2 3 .[Definimos la función continua g 1 : L −→ − 2 3 , 2 ]por g 1 :=3f − f 1 .Ahora ([ consi<strong>de</strong>remos los conjuntos cerrados y disyuntos A 1 =g1−1 − 2 ])([ 23 , −2 y B 1 = g1−199 3]), 2 . Nuevamente el Lema<strong>de</strong> [ Urysohn garantiza que existe una función continua f 2 : X −→− 2 9 , 2 ], tal que f 2 (A 1 ) = − 2 99 y f 2(B 1 ) = 2 9 y a<strong>de</strong>más |g 1(x) −f 2 (x)| ≤) 2.( 23) 2, para x ∈ L; esto es, |f(x) − (f 1 (x) + f 2 (x))| ≤( 23Continuando con este proceso, se obtiene una sucesión f 1 , f 2 , ...<strong>de</strong> funciones continuas en L <strong>de</strong> tal manera que∣∣ n∑ ∣∣∣∣ ( ) n 2 ∣ f − f i ≤ .3i=1Definimos F (x) = ∑ ∞i=1 f i(x).Es inmediato que F (x) = f(x) para cada x ∈ L. Veamos queF es una función continua. Sean x ∈ X y ɛ > 0. EscogemosN > 0 tal que ∑ ∞n=N+1( 23) n< ɛ 2 . Como f i es continua para110
cada i = 1, ..., N, escogemos una vecindad abierta U i <strong>de</strong> x, paracada i = 1, ..., N, tal que si y ∈ U i , entonces |f i (x)−f i (y)|
esultados propios <strong>de</strong> los espacios métricos. Comenzaremos conel Primer Axioma <strong>de</strong> Enumerabilidad.5.7.1 Definición. Un espacio topológico X es 1-enumerable sicada punto x ∈ X tiene un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>senumerable.5.7.2 Ejemplos.1. Todo espacio métrico (X, d) es 1-enumerable. En efecto,para cada x ∈ X la colección <strong>de</strong> bolas abiertas <strong>de</strong> la formaB(x, r), don<strong>de</strong> r es un número racional positivo, es unsistema fundamental <strong>de</strong> x enumerable.2. El Plano <strong>de</strong> Moore es un espacio 1-enumerable.3. El conjunto <strong>de</strong> los números reales con la topología generadapor los intervalos <strong>de</strong> la forma (a, b] es un espacio 1-enumerable.4. Cualquier subespacio <strong>de</strong> un espacio 1-enumerable es 1-enumerable.5. El producto <strong>de</strong> cualquier colección enumerable <strong>de</strong> espacios1-enumerables es 1-enumerable.5.7.3 Observación. Nótese que si X es 1-enumerable, si x ∈X, si (B n ) n∈N es un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> xenumerable, y si consi<strong>de</strong>ramos V 1 = B 1 , V 2 = V 1 ∩ B 1 , V 3 =V 2 ∩ B 2 y <strong>de</strong> manera inductiva tomamos V n+1 = V n ∩ B n paracada n ∈ N, entonces (V n ) n∈N es un sistema fundamental <strong>de</strong>vecinda<strong>de</strong>s <strong>de</strong> x enumerable que satisface que V n+1 ⊂ V n paracada n ∈ N.112
En los espacios 1-enumerables, las sucesiones permiten caracterizarla adherencia <strong>de</strong> un conjunto, así como las funciones continuasque tienen como dominio uno <strong>de</strong> estos espacios.5.7.4 Proposición. Sea X un espacio 1-enumerable.1. Si A ⊂ X entonces x ∈ A si y sólo si existe una sucesión<strong>de</strong> elementos <strong>de</strong> A que converge a x.2. Una función f : X −→ Y es continua si y sólo si paracada sucesión (x n ) n∈N en X que converge a un punto x lasucesión (f(x n )) n∈N converge a f(x) en Y .Demostración.1. Supongamos que x ∈ A y sea (V n ) n∈N un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x enumerable que satisface queV n+1 ⊂ V n para cada n ∈ N. Se tiene que para cada n ∈ Nexiste a n ∈ A ∩ V n . La sucesión (a n ) n∈N tiene todos sustérminos en A y converge a x.Recíprocamente, si (a n ) n∈N es una sucesión en A que convergea x, entonces dada V una vecindad cualquiera <strong>de</strong> x,existe N > 0 tal que si n > N, a n ∈ V . Entonces A∩V ≠ ∅y x ∈ A.2. Supongamos que f : X −→ Y es una función continua,que (x n ) n∈N es una sucesión en X que converge a un puntox ∈ X y sea V una vecindad <strong>de</strong> f(x). La continuidad <strong>de</strong>f garantiza que f −1 (V ) es una vecindad <strong>de</strong> x, luego existeN > 0 tal que para cada n > N, x n ∈ f −1 (V ). Esto es, paracada n > N, f(x n ) ∈ V . Entonces, la sucesión (f(x n )) n∈Nconverge a f(x).113
De manera recíproca, supongamos que f : X −→ Y esuna función tal que para cada sucesión (x n ) n∈N en X queconverge a un punto x, la sucesión (f(x n )) n∈N converge af(x) en Y y sea x ∈ X. Sea (V n ) n∈N un sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> x enumerable que satisface que V n+1 ⊂ V npara cada n ∈ N. Si f no es continua en x, existe unavecindad W <strong>de</strong> f(x) tal que para cada n ∈ N, f(a n ) /∈ Wpara algún a n ∈ V n . La sucesión (a n ) n∈N converge a x, pero(a n ) n∈N no converge a f(x). Esto contradice la hipótesis,luego f es continua en x para todo x ∈ X.Estudiaremos ahora el Segundo Axioma <strong>de</strong> Enumerabilidad.5.7.5 Definición. Un espacio topológico X es 2-enumerable siexiste una base enumerable para la topología <strong>de</strong> X.Es inmediato que todo espacio 2-enumerable es 1-enumerable.Pero no todo espacio 1-contable es 2-contable, aún en el caso <strong>de</strong>los espacios métricos.Veamos algunos ejemplos.5.7.6 Ejemplos.1. El Plano <strong>de</strong> Moore no es un espacio 2-enumerable.2. El conjunto <strong>de</strong> los números reales con la topología usual esun espacio 2-enumerable.114
3. Cualquier subespacio <strong>de</strong> un espacio 2-enumerable es 2-enumerable.4. El producto <strong>de</strong> cualquier colección enumerable <strong>de</strong> espacios2-enumerables es 2-enumerable.Terminamos esta sección estudiando los espacios separables.Antes <strong>de</strong> abordar la <strong>de</strong>finición, recor<strong>de</strong>mos que un subconjuntoA <strong>de</strong> un espacio topológico X es <strong>de</strong>nso en X si A = X.5.7.7 Definición. Un espacio topológico X es separable si contieneun subconjunto <strong>de</strong>nso enumerable.Los números reales con la topología usual son un ejemplo <strong>de</strong>un espacio separable, pero no todo espacio métrico tiene estapropiedad.De la <strong>de</strong>finición se obtiene que todo espacio X que sea 2-enumerablees separable. En efecto, si (B n ) n∈N es una base para latopología <strong>de</strong> X y si b n ∈ B n para cada n ∈ N, entonces elconjunto {b n : n ∈ N} es <strong>de</strong>nso en X; porque si x ∈ X y V esuna vecindad <strong>de</strong> x, existe n ∈ N tal que x ∈ B n y B n ⊂ V .Entonces b n ∈ V .Ejercicios115
Ejercicios 0.1-21. Demuestre con todo <strong>de</strong>talle cada una <strong>de</strong> las siguientes afirmaciones:a) A ∪ A = A y A ∩ A = A para cada conjunto A.b) A ∪ ∅ = A y A ∩ ∅ = ∅ para cada conjunto A.c) A ∪ B = B ∪ A y A ∩ B = B ∩ A para todo conjuntoA y todo conjunto B.d) A ∪ B = A si y sólo si B ⊂ A.e) A ∩ B = A si y sólo si A ⊂ B.f )A ∪ (B ∪ C) = (A ∪ B) ∪ C para A, B y C conjuntosarbitrarios.g) A ∩ (B ∩ C) = (A ∩ B) ∩ C para A, B y C conjuntosarbitrarios.h) A∪(B∩C) = (A∪B)∩(A∪C) para A, B y C conjuntosarbitrarios.i) A∩(B∪C) = (A∩B)∪(A∩C) para A, B y C conjuntosarbitrarios.j ) Si A y B son subconjuntos <strong>de</strong> X entonces (A ∪ B) c =A c ∩ B c .k) Si A y B son subconjuntos <strong>de</strong> X entonces (A ∩ B) c =A c ∪ B c .2. Escriba los siguientes conjuntos en términos <strong>de</strong> uniones eintersecciones <strong>de</strong> los conjuntos A, B y C.a) {x : x ∈ A y (x ∈ B o x ∈ C)}.b) {x : x ∈ A o (x ∈ B y x ∈ C)}.116
c) {(x : x ∈ A y x ∈ B) o x ∈ C}.d) {(x : x ∈ A o x ∈ B) y x ∈ C}.3. En los siguientes literales dé una <strong>de</strong>mostración <strong>de</strong> las afirmacionesque consi<strong>de</strong>re verda<strong>de</strong>ras o ejemplos que muestrenque <strong>de</strong>terminadas afirmaciones son falsas. En caso <strong>de</strong> queuna igualdad no se satisfaga verifique si por lo menos una<strong>de</strong> las contenencias es cierta.a) A (A B) = B.b) A (B A) = A B.c) A ∩ (B C) = (A ∩ B) (A ∩ C).d) A ∪ (B C) = (A ∪ B) (A ∪ C).Regresar117
Ejercicios 0.31. Demuestre las leyes <strong>de</strong> De Morgan:a)(⋃A∈A A) c ⋂ =A∈A Ac .b)(⋂A∈A A) c ⋃ =A∈A Ac .2. Justifique cuidadosamente cada una <strong>de</strong> las siguientes afirmaciones:a) Si A es una familia vacía <strong>de</strong> conjuntos entonces ⋃ A∈A A =∅.b) Si A es una familia vacía <strong>de</strong> subconjuntos <strong>de</strong> X entonces⋂ A∈A A = X.3. Para cada n ∈ N sea A n = {x ∈ R : −1n < x < 1 }. Calcule⋂nn∈N A n.4. Para cada n ∈ N sea A n = [ 1 n , 2 − 1 n ]. Calcule ⋃ n∈N A n.5. En los siguientes literales <strong>de</strong> una <strong>de</strong>mostración <strong>de</strong> las afirmacionesque consi<strong>de</strong>re verda<strong>de</strong>ras o ejemplos que muestrenque <strong>de</strong>terminadas afirmaciones son falsas.a) Si x ∈ ⋃ A∈Aentonces x ∈ A para al menos un elementoA ∈ A.b) Si x ∈ A para al menos un elemento A ∈ A entoncesx ∈ ⋃ A∈A .c) Si x ∈ ⋃ A∈Aentonces x ∈ A para cada elemento A ∈A.118
d) Si⋃x ∈ A para cada elemento A ∈ A entonces x ∈A∈A .e) Si x ∈ ⋂ A∈Aentonces x ∈ A para al menos un elementoA ∈ A.f )Si x ∈ A para al menos un elemento A ∈ A entoncesx ∈ ⋂ A∈A .g) Si x ∈ ⋂ A∈Aentonces x ∈ A para cada elemento A ∈A.h) Si x ∈ A para cada elemento A ∈ A entonces x ∈⋂A∈A .Regresar119
Ejercicios 0.41. Muestre con un ejemplo que si A y B son conjuntos arbitrariosentonces no es siempre cierto que A × B = B × A.¿Bajo qué condiciones es cierta esta igualdad?2. Determine cuáles <strong>de</strong> los siguientes subconjuntos <strong>de</strong> R sepue<strong>de</strong>n expresar como el producto cartesiano <strong>de</strong> dos subconjuntos<strong>de</strong> R.a) {(x, y) : y es un entero }.b) {(x, y) : x es un natural par y y ∈ Q}.c) {(x, y) : y < x}.d) {(x, y) : x es un múltiplo entero <strong>de</strong> π}.e) {(x, y) : x 2 − y 2 < 1}.3. Determine cuáles <strong>de</strong> las siguientes afirmaciones son verda<strong>de</strong>rasy cuáles son falsas. En cada caso dé una <strong>de</strong>mostracióno un contraejemplo indicando a<strong>de</strong>más si por lo menos escierta una contenencia.a) A × (A B) = (A × A) (A × B).b) A × (B A) = (A × B) (A × A).c) A × (B C) = (A × B) (A × C).d) A × (B ∪ C) = (A × B) ∪ (A × C).e) A × (B ∩ C) = (A × B) ∩ (A × C).f )(A ∪ B) × (C ∪ D) = (A × C) ∪ (B × D).g) (A ∩ B) × (C ∩ D) = (A × C) ∩ (B × D).h) (A B) × (C D) = (A × C) (B × D).Regresar120
Ejercicios 0.51. Dé un ejemplo <strong>de</strong> una función <strong>de</strong> R en R uno a uno perono sobreyectiva.2. Dé un ejemplo <strong>de</strong> una función <strong>de</strong> R en R sobreyectiva perono uno a uno.3. dé un ejemplo <strong>de</strong> una función biyectiva <strong>de</strong> N en Q.4. Sea f : X −→ Y una función. Si A y B son subconjuntos<strong>de</strong> X y A ⊂ B entonces f(A) ⊂ f(B).5. Sea f : X −→ Y una función. Si C y D son subconjuntos<strong>de</strong> Y y C ⊂ D entonces f −1 (C) ⊂ f −1 (D).6. Sea f : X −→ Y una función. Si A y B son subconjuntos<strong>de</strong> X pruebe que f(A ∪ B) = f(A) ∪ f(B). Si A es unafamilia cualquiera <strong>de</strong> subconjuntos <strong>de</strong> X ¿se pue<strong>de</strong> afirmarque f( ⋃ A∈A A) = ⋃ A∈Af(A)? Justifique completamente surespuesta.7. Sea f : X −→ Y una función. Si A y B son subconjuntos <strong>de</strong>X muestre con un contraejemplo que no siempre se satisfacela igualdad f(A ∩ B) = f(A) ∩ f(B).8. Sea f : X −→ Y una función. Si C y D son subconjuntos<strong>de</strong> Y pruebe que f −1 (C ∪ D) = f −1 (C) ∪ f −1 (D) yque f −1 (C ∩ D) = f −1 (C) ∩ f −1 (D). Más aún, pruebeque si C es una familia cualquiera <strong>de</strong> subconjuntos <strong>de</strong> Yentonces f −1 ( ⋃ C∈C C) = ⋃ C∈C f −1 (C) y f −1 ( ⋂ C∈C C) =⋂C∈C f −1 (C).121
9. Determine cuáles <strong>de</strong> las siguientes afirmaciones son verda<strong>de</strong>ras,en cuáles se satisface sólo una inclusión y en cuáleslas dos inclusiones resultan ser falsas. En cada caso justifiquecompletamente su respuesta con una <strong>de</strong>mostración ocon un contraejemplo.a) Sea f : X −→ Y una función. Si A y B son subconjuntos<strong>de</strong> X entonces f(A B) = f(A) f(B).b) Sea f : X −→ Y una función. Si A y B son subconjuntos<strong>de</strong> X entonces f((A B) ∪ (B A)) =(f(A) f(B)) ∪ (f(B) f(A)).c) Sea f : X −→ Y una función. Si C y D son subconjuntos<strong>de</strong> Y entonces f −1 (C D) = f −1 (C) f −1 (D).10. Consi<strong>de</strong>remos f 1 : X 1 −→ Y 1 y f 2 : X 2 −→ Y 2 dos funcionesy <strong>de</strong>finamos la función g : X 1 × X 2 −→ Y 1 × Y 2 porg(x 1 , x 2 ) = (f 1 (x 1 ), f 2 (x 2 )). Pruebe o refute cada una <strong>de</strong> lassiguientes afirmaciones:a) g es uno a uno si y sólo si f 1 y f 2 lo son.b) g es sobreyectiva si y sólo si f 1 y f 2 lo son.11. Sean f : X −→ Y una función, A ⊂ X y B ⊂ Y .a) Demuestre que A ⊂ f −1 (f(A)).b) Dé un contraejemplo que muestre que no siempre setiene que f −1 (f(A)) ⊂ A.c) ¿Bajo qué condiciones es cierta la igualdad f −1 (f(A)) =A?d) Demuestre que f(f −1 (B)) ⊂ B.122
e) Dé un contraejemplo que muestre que no siempre setiene que B ⊂ f(f −1 (B)).f )¿Bajo qué condiciones es cierta la igualdad B = f(f −1 (B))?12. Consi<strong>de</strong>remos f : X −→ Y y g : Y −→ Z dos funciones.Demuestre las siguientes afirmaciones:a) Si M ⊂ Z,entonces (g ◦ f) −1 (M) = f −1 (g −1 (M)).b) Si f y g son uno a uno, también lo es g ◦ f.c) Si f y g son sobreyectivas, también lo es g ◦ f.d) Si g ◦ f es uno a uno, entonces f es uno a uno pero gpodría no serlo.e) Si g ◦ f es sobreyectiva, entonces g es sobreyectiva perof podría no serlo.Regresar123
Ejercicios 0.61. Sea (X i ) i∈I una familia <strong>de</strong> conjuntos. Muestre que si X i = ∅para algún i ∈ I entonces ∏ i∈I X i = ∅.2. Muestre que si n > 1 y X 1 , ..., X n son conjuntos, entoncesexiste una función biyectiva <strong>de</strong>finida <strong>de</strong>l conjunto X 1 ×...×X n en el conjunto (X 1 × ... × X n−1 ) × X n .3. Muestre que si (X i ) i∈I una familia <strong>de</strong> conjuntos y si J yK son subconjuntos <strong>de</strong> I no vacíos y disyuntos, tales queI = J ∪ K, entonces existe una función biyectiva <strong>de</strong>finida<strong>de</strong>l producto ∏ i∈I X i en el conjunto ( ∏ j∈J X j)×( ∏ k∈K X k)en el conjunto.4. Con frecuencia se <strong>de</strong>nota al conjunto R N con el símbolo R ω .Determine cuáles <strong>de</strong> los siguientes subconjuntos <strong>de</strong> R ω sepue<strong>de</strong>n expresar como producto cartesiano <strong>de</strong> subconjuntos<strong>de</strong> R.a) {x : x n ∈ Z para todo n}.b) {x : x n ≥ n para todo n}.c) {x : x n = x n+1 para todo n primo}.d) {x : x n ∈ Z para todo n ≥ 1000}.5. Sean (X i ) i∈I y (Y i ) i∈I dos familias <strong>de</strong> conjuntos. Determinecuáles <strong>de</strong> las siguientes afirmaciones son verda<strong>de</strong>ras y cuálesson falsas. En cada caso dé una <strong>de</strong>mostración o un contraejemploindicando a<strong>de</strong>más si por lo menos es cierta unacontenencia.∏a)i∈I (X i Y i ) = ∏ i∈I X i ∏ i∈I Y i.124
)c)∏i∈I (X i ∪ Y i ) = ∏ i∈I X i ∪ ∏ i∈I Y i.∏i∈I (X i ∩ Y i ) = ∏ i∈I X i ∩ ∏ i∈I Y i.Regresar125
Ejercicios 0.71. Determine cuáles <strong>de</strong> las siguientes relaciones <strong>de</strong>finidas sobreR son relaciones <strong>de</strong> equivalencia. Para cada relación <strong>de</strong>equivalencia que encuentre <strong>de</strong>termine las clase <strong>de</strong> equivalencia<strong>de</strong> cada x ∈ R.a) x ∼ y sii x − y ∈ Z.b) x ∼ y sii x − y ∈ Q.c) x ∼ y sii x − y ∈ R.d) x ∼ y sii xy ∈ Z.e) x ∼ y sii xy ∈ Q.f ) x ∼ y sii x ≤ y.g) x ∼ y sii |x| = |y|.h) x ∼ y sii x = 2y.2. Determine cuáles <strong>de</strong> las siguientes relaciones <strong>de</strong>finidas sobreR 2 son relaciones <strong>de</strong> equivalencia. Para cada relación<strong>de</strong> equivalencia que encuentre <strong>de</strong>termine las clase <strong>de</strong> equivalencia<strong>de</strong> cada (x, y) ∈ R 2 .a) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 1 − y 2 ∈ Z.b) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 2 − y 1 ∈ Q.c) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 1 − y 2 ∈ R.d) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 1 y 2 ∈ Z.e) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 1 y 2 ∈ Q.f ) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii y 1 ≤ x 2 .g) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii √ x 2 1 + y2 1 = √ x 2 2 + y2 2 .126
h) (x 1 , y 1 ) ∼ (x 2 , y 2 ) sii x 1 = x 2 .3. Consi<strong>de</strong>remos f : X −→ Y una función y <strong>de</strong>finamos larelación ∼ sobre X por a ∼ b sii f(a) = f(b).a) Demuestre que ∼ es una relación <strong>de</strong> equivalencia.b) Demuestre que si f es sobreyectiva y si X/∼ es el conjunto<strong>de</strong> clases <strong>de</strong> equvalencia, entonces existe una correspon<strong>de</strong>nciabiyectiva entre X/∼ y el conjunto Y .c) Si X = Y = R <strong>de</strong>scriba un método geométrico que permitavisualizar la clase <strong>de</strong> equivalencia <strong>de</strong> un númeroreal.4. Demuestre que dada una colección <strong>de</strong> relaciones <strong>de</strong> equivalenciasobre un conjunto X, la intersección <strong>de</strong> la coleccióntambién es una relación <strong>de</strong> equivalencia sobre X.5. ¿Es la unión <strong>de</strong> relaciones <strong>de</strong> equivalencia sobre un conjuntoX una relación <strong>de</strong> equivalencia sobre X?6. Determine cuáles <strong>de</strong> las siguientes relaciones <strong>de</strong>finidas sobreR 2 son relaciones <strong>de</strong> or<strong>de</strong>n.a) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 1 −y 2 ∈ N).b) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 2 ≤ y 2 ).c) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 1 −y 2 ∈ Z).d) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 1 y 2 ∈ Z).e) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 1 y 1 ∈ Q).f )(x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o (x 1 < x 2 o(x 1 = x 2 y y 1 < y 2 )).127
g) (x 1 , y 1 ) ≤ (x 2 , y 2 ) sii ((x 1 , y 1 ) = (x 2 , y 2 )) o ( √ x 2 1 + y2 1
Ejercicios 0.81. Demuestre que Q es un conjunto contable.2. Demuestre que una unión contable <strong>de</strong> conjuntos contableses contable. ¿Qué ocurre con la unión no contable <strong>de</strong> conjuntoscontables?3. Demuestre que un producto finito <strong>de</strong> conjuntos contables escontable. ¿Qué ocurre con el producto infinito <strong>de</strong> conjuntoscontables?4. Muestre que el Axioma <strong>de</strong> Elección es equivalente a la siguienteafirmación: Para cualquier familia (A i ) i∈I <strong>de</strong> conjuntosno vacíos, con I ≠ ∅, el producto cartesiano ∏ i∈I A ies no vacío.Regresar129
Ejercicios 1.11. Demuestre que las siguientes funciones son métricas sobrelos conjuntos dados.a) Si X es un conjunto cualquiera, sea ρ : X × X −→ Rla función <strong>de</strong>finida por{0 si x = yρ(x, y) =1 si x ≠ y.b) En R la función <strong>de</strong>finida por ρ(x, y) = |x − y|.c) En R n la función <strong>de</strong>finida por∑ρ((x 1 , ..., x n ), (y 1 , ..., y n )) = √ n (x i − y i ) 2 .d) En el plano, la función <strong>de</strong>finida pori=1ρ 1 ((x 1 , y 1 ), (x 2 , y 2 )) = |x 1 − x 2 | + |y 1 − y 2 |es un espacio métrico. La función ρ 1 se suele llamar lamétrica <strong>de</strong>l taxista.e) En el plano, la función <strong>de</strong>finida por <strong>de</strong>finida porρ 2 ((x 1 , y 1 ), (x 2 , y 2 )) = máx{|x 1 − x 2 |, |y 1 − y 2 |}es un espacio métrico.f ) En el conjunto X <strong>de</strong> todas las funciones acotadas f :R −→ R, la función ρ : X × X −→ R <strong>de</strong>finida porρ(f, g) = sup{|f(x) − g(x)| : x ∈ R}.130
g) En el conjunto C(I) <strong>de</strong> todas las funciones continuas<strong>de</strong>finidas <strong>de</strong>l intervalo I = [0, 1] en R, la función ρ :C(I) × C(I) −→ R <strong>de</strong>finida por ρ(f, g) = ∫ 10 |f(x) −g(x)|dx.h) En cualquier conjunto contable X = {x 1 , x 2 , ...}, lafunción d : X × X −→ R <strong>de</strong>finida por⎧⎨1 + 1 si i ≠ jd(x i , x j ) = i + j⎩0 si i = j.2. Demuestre que las funciones <strong>de</strong>finidas a continuación sonseudométricas sobre los conjuntos dados.a) En un conjunto X, la función ρ : X ×X −→ R <strong>de</strong>finidapor ρ(x, y) = 0.b) Sea x 0 ∈ [0, 1]. En C(I), la función η : C(I)×C(I) −→R <strong>de</strong>finida por η(f, g) = |f(x 0 − g(x 0 )|.3. Sean (X, d) y (Y, m) dos espacios métricos. ¿Es la funciónρ : (X × Y ) × (X × Y ) −→ X × Y , <strong>de</strong>finida porρ((x 1 , x 1 ), (x 2 , y 2 )) = máx{d(x 1 , x 2 ), m(y 1 , y 2 )}, una métricasobre X × Y ?4. Sea ρ una seudométrica <strong>de</strong>finida sobre un conjunto X. Definimosla relación ∼ sobre X por x ∼ y sii ρ(x, y) = 0.a) Pruebe que ∼ es una relación <strong>de</strong> equivalencia sobre X.b) Sea X/∼ el conjunto <strong>de</strong> todas las clases <strong>de</strong>equivalencia<strong>de</strong>terminadas por ∼. Demuestre que la función d :X/∼ × X/∼ −→ R <strong>de</strong>finida por d([x], [y]) = ρ(x, y) esuna métrica sobre X/∼.131
Regresar132
Ejercicios 1.21. Demuestre que si X tiene la métrica discreta y Y es un espaciométrico cualquiera, entonces cualquier función <strong>de</strong>finida<strong>de</strong> X en Y es continua. ¿Qué ocurre si Y es un espacioseudométrico?2. Demuestre que si X es un espacio métrico cualquiera y Ytiene la seudométrica <strong>de</strong>finida por d(w, z) = 0 para todo w ytodo z en Y , entonces cualquier función <strong>de</strong>finida <strong>de</strong> X en Yes continua. ¿Qué ocurre si X es un espacio seudométrico?3. De un ejemplo <strong>de</strong> dos métricas d 1 y d 2 , <strong>de</strong>finidas sobre unmismo conjunto X, <strong>de</strong> tal manera que la función idéntica<strong>de</strong> (X, d 1 ) en (X, d 2 ) no resulte continua.4. Suponga que d 1 y d 2 son dos métricas <strong>de</strong>finidas sobre unmismo conjunto X. Si toda función <strong>de</strong>finida <strong>de</strong> (X, d 1 ) en(X, d 2 ) es continua, ¿qué pue<strong>de</strong> afirmar con seguridad <strong>de</strong>d 1 y d 2 ? Demuestre su conjetura.5. Dos espacios métricos (X, d) y (Y, m) son isométricos siexiste una función biyectiva f : X −→ Y tal qued(x 1 , x 2 ) = m(f(x 1 ), f(x 2 ))para cada x 1 y cada x 2 en X. La función f se llama unaisometría.a) Pruebe que si f : X −→ Y es una isometría, entoncesf y f −1 son funciones continuas.b) Pruebe que el intervalo [0, 1] es isométrico a cualquierotro intervalo cerrado <strong>de</strong> R <strong>de</strong> la misma longitud.133
c) Pruebe que si R y R 2 tienen cada uno su métrica usual,endtonces no son isométricos.d) Pruebe que si X y Y tienen cada uno la métrica discretaentonces X y Y son isométricos si y sólo si tienen lamisma cardinalidad.e) Defina una métrica en el intervalo abierto (0, 1), <strong>de</strong> talmanera que el espacio métrico resultante sea isométricoa R con la mérica usual.Regresar134
Ejercicios 1.31. Sea X un espacio métrico. Demuestre los siguientes hechos:a) El conjunto vacío ∅ y el conjunto X son conjuntos abiertos.b) Si A y B son conjuntos abiertos en X entonces A ∩ Bes un conjunto abierto en X.c) La unión <strong>de</strong> cualquier familia <strong>de</strong> conjuntos abiertos enX es un conjunto abierto en X.d) Todo intervalo abierto <strong>de</strong> R es un conjunto abierto.2. Sea X un espacio métrico. Decimos que un subconjunto F<strong>de</strong> X es cerrado en X si su complemento es abierto. Pruebelas siguientes afirmaciones:a) Los subconjuntos <strong>de</strong> X que tienen exactamente un puntoson cerrados.b) Si A y B son conjuntos cerrados en X entonces A ∪ Bes un conjunto cerrado en X.c) La intersección <strong>de</strong> cualquier familia <strong>de</strong> conjuntos cerradosen X es un conjunto cerrado en X.d) Si X tiene la métrica discreta entonces todo subconjunto<strong>de</strong> X es abierto y cerrado.e) Todo intervalo cerrado <strong>de</strong> R es un conjunto cerrado.3. Sean X y Y espacios métricos y sea f : X −→ Y una función.Demuestreque las siguientes afirmaciones son equivalentes:a) f es continua.135
) Si A es un subconjunto abierto <strong>de</strong> Y entonces f −1 (A)es un subconjunto abierto <strong>de</strong> X.c) Si K es un subconjunto cerrado <strong>de</strong> Y entonces f −1 (K)es un subconjunto cerrado <strong>de</strong> X.4. Mueste que los numerales 2, 3 y 4 <strong>de</strong> 1.1.2. establecen métricasequivalentes sobre R 2 .5. Sea (X, d) es un espacio métrico. Muestre que la funciónd 1 : X × X −→ R <strong>de</strong>finida por d 1 (x, y) = mín{d(x, y), 1}es una métrica acotada sobre X equivalente a la métrica d.Regresar136
Ejercicios 2.11. Pruebe que la colección <strong>de</strong> todos los intervalos <strong>de</strong> la forma[a, b) con a y b números reales y a < b es una base para unatopología sobre R.2. Pruebe que la colección <strong>de</strong> todos los rectángulos abiertos(es <strong>de</strong>cir, sin sus bor<strong>de</strong>s) es una base para una topologíasobre el plano.3. Para ceda entero positivo n, sea S n = {n, n+1, ...}. Muestreque la colección <strong>de</strong> todos los subconjuntos <strong>de</strong> N que contienena algún S n es una base para una topología sobreN.4. Sean X un conjunto y S una colección <strong>de</strong> subconjuntos <strong>de</strong>X. Sea B la colección <strong>de</strong> todas las intersecciones finitas <strong>de</strong>elementos <strong>de</strong> S.a) Demuestre que la unión <strong>de</strong> la colección B es X. (Sugerencia:Consi<strong>de</strong>re la intersección <strong>de</strong> una familia vacía<strong>de</strong> elementos <strong>de</strong> S.)b) Pruebe que si A y B pertenecen a B y si x ∈ A ∩ B,entonces existe C ∈ B tal que x ∈ C y C ⊂ A ∩ B.Se ha <strong>de</strong>mostrado que B es una base para una topologíasobre X. La colección S es una sub-base para la topología,que genera la base B. Los elementos <strong>de</strong> S se dicen ser subbásicos.5. Consi<strong>de</strong>re la colección S <strong>de</strong> conjuntos <strong>de</strong> la forma (−∞, a)junto con los conjuntos <strong>de</strong> la forma (b, ∞). Esta colecciónes una sub-base para una topología sobre R.137
a) Describa la base B generada por S.b) Describa los conjuntos abiertos generados por B.6. Consi<strong>de</strong>re la colección S <strong>de</strong> todas las lineas rectas en elplano.a) Describa la base B generada por S.b) Describa los conjuntos abiertos generados por B.7. Sea X un conjunto y B una base para una topología sobreX. Demuestre cada una <strong>de</strong> las siguientes afirmaciones:a) El conjunto vacío ∅ y el conjunto X son conjuntos abiertos.b) Si A y B son conjuntos abiertos en X entonces A ∩ Bes un conjunto abierto en X.c) La unión <strong>de</strong> cualquier familia <strong>de</strong> conjuntos abiertos enX es un conjunto abierto en X.Regresar138
Ejercicios 2.21. Describa todas las topologías que existen sobre un conjunto<strong>de</strong> dos elementos y <strong>de</strong>termine para cada par <strong>de</strong> ellas si unaes mas fina o menos fina que la otra.2. Determine cuáles <strong>de</strong> las siguientes afirmaciones son verda<strong>de</strong>rasy cuáles son falsas. En cada caso, justifique su respuestacon una <strong>de</strong>mostración o un contraejemplo.a) La intersección <strong>de</strong> dos topologías sobre un conjunto Xes una topología sobre X.b) La intersección <strong>de</strong> cualquier familia <strong>de</strong> topologías sobreun conjunto X es una topología sobre X.c) La unión <strong>de</strong> dos topologías sobre un conjunto X es unatopología sobre X.d) La unión <strong>de</strong> cualquier familia <strong>de</strong> topologías sobre unconjunto X es una topología sobre X.3. Demuestre que si B es una base para una topología sobreX, entonces la topología generada por B es igual a la intersección<strong>de</strong> todas las topologías sobre X que contienen aB.4. Demuestre que si S es una sub-base para una topologíasobre X, entonces la topología generada por S es igual a laintersección <strong>de</strong> todas las topologías sobre X que contienena S.5. Dé un ejemplo que muestre que la topología radial <strong>de</strong>l planono es menos fina que la topología usual.Regresar139
Ejercicios 2.31. Suponga que X es un conjunto dotado con la topologíadiscreta. Determine todas las vecinda<strong>de</strong>s <strong>de</strong> cada punto x ∈X.2. Sea X un conjunto dotado con la topología grosera y seax ∈ X. Determine todas las vecinda<strong>de</strong>s <strong>de</strong> x.3. Consi<strong>de</strong>re el conjunto <strong>de</strong> los números naturales con la topología<strong>de</strong> las colas a la <strong>de</strong>recha. Determine todas las vecinda<strong>de</strong>s<strong>de</strong> cada número natural.4. Consi<strong>de</strong>re el conjunto <strong>de</strong> los números naturales con la topología<strong>de</strong> llos complementos finitos. Determine todas las vecinda<strong>de</strong>s<strong>de</strong> cada número natural.5. Suponga que τ 1 y τ 2 son dos topologías sobre el mismoconjunto X y que τ 1 es más fina que τ 2 . Compare las colecciones<strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> un mismo punto en los dos espaciostopológicos.6. Sea X un espacio topológico y suponga quepara cada x ∈ Xla colección B(x) es un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s<strong>de</strong> x. Pruebe los siguientes hechos:a) Si V ∈ B(x), entonces x ∈ V .b) Si V 1 , V 2 ∈ B(x), entonces existe V 3 ∈ B(x) tal queV 3 ⊂ V 1 ∩ V 2 .c) Si V ∈ B(x), existe U ∈ B(x) tal que si y ∈ U entoncesW ⊂ V para algún W ∈ B(y).d) Un subconjunto A <strong>de</strong> X es abierto si y sólo si contieneuna vecindad básica <strong>de</strong> cada uno <strong>de</strong> sus puntos.140
7. Sea Γ = {(x, y) ∈ R 2 : y ≥ 0}. Para cada z = (x, y) ∈ Γconsi<strong>de</strong>re la colección B(z) <strong>de</strong>finida <strong>de</strong> la siguiente manera:Si y > 0 B(z) es la colección <strong>de</strong> todas las bolas abiertasusuales centradas en z con radio menor o igual que y y siy ′ = 0, V(z ′ ) es la colección <strong>de</strong> todos los conjuntos <strong>de</strong> laforma {z ′ } ∪ A don<strong>de</strong> A es una bola abierta contenida en Γtangente al eje real en z ′ . Demuestre que estas coleccionessatisfacen las hipótesis <strong>de</strong> la Proposición 2.3.6.8. Para cada punto z <strong>de</strong>l plano <strong>de</strong>finimos B(z) como la colección<strong>de</strong> todos los conjuntos <strong>de</strong> la forma {z} ∪ A don<strong>de</strong> Aes una bola abierta usual, centrada en z, <strong>de</strong> la cual seha removido un número finito <strong>de</strong> segmentos <strong>de</strong> linea quepasan por z. Demuestre que estas colecciones satisfacen lashipótesis <strong>de</strong> la Proposición 2.3.6.9. Para cada número real x distinto <strong>de</strong> 0 <strong>de</strong>finimos B(x) comola colección <strong>de</strong> todos los intervalos abiertos centrados en xmientras que los elementos <strong>de</strong> B(0) serán los conjuntos <strong>de</strong>la forma (−∞, −n) ∪ (−ɛ, ɛ) ∪ (n, ∞) don<strong>de</strong> n ∈ N y ɛ > 0.Demuestre que estas colecciones satisfacen las hipótesis <strong>de</strong>la Proposición 2.3.6.10. Consi<strong>de</strong>remos el conjunto R I <strong>de</strong> todas las funciones <strong>de</strong>finidas<strong>de</strong>l intervalo I = [0, 1] en R. Para cada f ∈ R I <strong>de</strong>finimosB(f) como la colección <strong>de</strong> todos los conjuntos <strong>de</strong> la formaU(f, F, δ) = {g ∈ R I : |g(x) − f(x)| < δ, para cada x ∈ F }don<strong>de</strong> F es un subconjunto finito <strong>de</strong> I y δ > 0. Demuestreque estas colecciones satisfacen las hipótesis <strong>de</strong> la Proposición2.3.6.Regresar141
Ejercicios 2.41. Determine cuáles <strong>de</strong> los siguientes subconjuntos <strong>de</strong> R soncerrados justificando completamente su respuesta.a) [−1, 1).b) [1, ∞).{ } 1c)n : n ∈ N .{ } 1d)n : n ∈ N ∪ {0}.e) Z.f ) Q.g) R Z.h) R Q.2. Pruebe que en cualquier espacio métrico (X, d), cada bolacerrada B[x, ɛ] = {y ∈ X : d(x, y) ≤ ɛ} es un conjuntocerrado.3. Sean τ 1 y τ 2 dos topologías <strong>de</strong>finidas sobre un mismo conjuntoX. Si τ 1 es más fina que τ 2 , ¿qué relación hay entre lacolección <strong>de</strong> conjuntos cerrados <strong>de</strong> (X, τ 1 ) y la colección <strong>de</strong>conjuntos cerrados <strong>de</strong> (X, τ 2 )? Como es natural, justifiquecuidadosamente su respuesta.4. Sean X y Y espacios topológicos. Una función f : X −→ Yes cerrada si aplica conjuntos cerrados en conjuntos cerrados.Esto es, si para cada K cerrado en X se tiene que f(K)es cerrado en Y .142
a) Sean τ la topología usual sobre R y ρ la topología <strong>de</strong>complementos finitos sobre Z. Dé un ejemplo <strong>de</strong> unafunción cerrada <strong>de</strong>finida <strong>de</strong> (R, τ) en (Z, ρ).b) Muestre con un ejemplo que no toda función cerrada<strong>de</strong>finida <strong>de</strong> un espacio métrico en otro es continua.c) Muestre con un ejemplo que no toda función continua<strong>de</strong>finida <strong>de</strong> un espacio métrico en otro es cerrada.5. Sean X un espacio topológico y K una familia <strong>de</strong> subconjuntos<strong>de</strong> X que satisface las siguientes condiciones:a) ∅ y X pertenecen a K.b) Si F, K ∈ K entonces F ∪ K ∈ K.c) Si C ⊂ K, entonces ⋂ F ∈C F ∈ K.Demuestre que la colección τ <strong>de</strong> todos los complementos<strong>de</strong> elementos <strong>de</strong> K es una topología sobre X y que K es lacolección <strong>de</strong> conjuntos cerrados <strong>de</strong>l espacio (X, τ).6. Sea X un espacio topológico. Una familia K <strong>de</strong> subconjuntoscerrados <strong>de</strong> X es una base para los conjuntos ceradosen X si cualquier conjunto cerrado es intersección <strong>de</strong> elementos<strong>de</strong> K.a) Demuestre que K es una base para los conjuntos ceradosen X si y sólo si la colección B = {K c : K ∈ K},<strong>de</strong> todos los complementos <strong>de</strong> elementos <strong>de</strong> K es unabase para la topología <strong>de</strong> X.b) ¿Es la colección <strong>de</strong> todos los intervalos cerrados en Runa base para los conjuntos cerados en R usual ?Regresar143
Ejercicios 2.5{ }−11. Consi<strong>de</strong>remos A =n : n ∈ N como subconjunto <strong>de</strong>R. Pruebe que el número 0 es adherente a A si sobre Rconsi<strong>de</strong>ramos la topología usual, pero 0 NO si sobre R consi<strong>de</strong>ramosla topología discreta o la topología generada porlos intervalos <strong>de</strong> la forma [a, b) con a < b.2. Pruebe que en el Plano <strong>de</strong> Moore, cada punto <strong>de</strong> la forma(a, 0) es adherente al conjunto {(x, y) : y > 0}.3. Pruebe que si R 2 tiene la topología <strong>de</strong> los complementosfinitos, el punto (0, 0) es adherente al conjunto A = {(x, y) :y > x 2 +1} y que este punto NO es adherente a A si estamosconsi<strong>de</strong>rando la topología usual sobre R 2 .4. Pruebe que en R con la topología usual la adherencia <strong>de</strong>lintervalo (a, b) es el intervalo [a, b].5. Pruebe que la adherencia <strong>de</strong>l conjunto <strong>de</strong> los números irracionalesen R es R.6. ¿Es Q un conjunto <strong>de</strong>nso en R con la topología <strong>de</strong> los complementosfinitos?7. ¿Es Q un conjunto <strong>de</strong>nso en R con la topología <strong>de</strong> las colasa la <strong>de</strong>recha?8. Suponga que τ 1 y τ 2 son dos topologías sobre un mismo conjuntoX y que τ 1 es más fina que τ 2 . Compare la adherencia<strong>de</strong> un subconjunto A <strong>de</strong> X en (X, τ 1 ) con su adherencia en(X, τ 2 ).144
9. Sea X cualquier conjunto. Diremos que para cada A ⊂ X,A = A. Pruebe que la función A ↦−→ A es una operación<strong>de</strong> adherencia.10. Sea X un conjunto cualquiera y <strong>de</strong>finamos A = X para todoA ⊂ X, A ≠ ∅ y ∅ = ∅. Pruebe que la función A ↦−→ A esuna operación <strong>de</strong> adherencia.11. Si X es un conjunto infinito y para cada A ⊂ X <strong>de</strong>finimos{A si A es finitoA =X si A es infinito,pruebe que la función A ↦−→ A es una operación <strong>de</strong> adherencia.12. Si para cada A ⊂ R <strong>de</strong>finimos⎧(−∞, sup A] si A es no vacío y está acotado⎪⎨A = Rsuperiormentesuperiormente⎪⎩∅ si A = ∅,si A es no vacío y no está acotadopruebe que la función A ↦−→ A es una operación <strong>de</strong> adherencia.13. Sean X un conjunto y B un subconjunto fijo <strong>de</strong> X. Paracada A ⊂ X <strong>de</strong>finimos{A ∪ B si A ≠ ∅A =∅ si A = ∅.Pruebe que la función A ↦−→ A es una operación <strong>de</strong> adherencia.145
Regresar146
Ejercicios 2.61. Explique claramente cuál es la diferencia entre punto <strong>de</strong>acumulación y punto adherente.2. Determine los puntos <strong>de</strong> acumulación <strong>de</strong> cada uno <strong>de</strong> lossiguientes subconjuntos <strong>de</strong> R.a) Z.b) Q.c) R Q.d) (−1, 1].e) [1, ∞).f ){− 1 }n : n ∈ N .{ } 1g)n : n ∈ N ∪ {0}.3. Demuestre o dé un contraejemplo que refute la siguienteafirmación: “Si X es un espacio topológico y A ⊂ X es unconjunto unitario cerrado en X, entonces A ′ = ∅.”4. Dé un ejemplo <strong>de</strong> un espacio topológico X en el cual A = A ′para todo subconjunto A <strong>de</strong> X con más <strong>de</strong> un punto.5. Sea X es un espacio topológico. Demuestre o dé contraejemplosque refuten cada una <strong>de</strong> las siguientes afirmaciones:a) (A ′ ) ′ = A ′ para cada A ⊂ X.b) (A ∪ B) ′ = A ′ ∪ B ′ para cada A y cada B subconjuntos<strong>de</strong> X.147
c) (A ∩ B) ′ = A ′ ∩ B ′ para cada A y cada B subconjuntos<strong>de</strong> X.d) (A c ) ′ = (A ′ ) c para cada A ⊂ X.e) A ′ es cerrado en X para cada A ⊂ X.Regresar148
Ejercicios 2.71. Demuestre la Proposición 2.7.3.2. Demuestre la Proposición 2.7.4.3. Sea X es un espacio topológico. Demuestre o dé contraejemplosque refuten cada una <strong>de</strong> las siguientes afirmaciones:a) (A ◦ ) ◦ = A ◦ para cada A ⊂ X.b) (A∩B) ◦ = A ◦ ∩B ◦ para cada A y cada B subconjuntos<strong>de</strong> X.c) (A c ) ◦ = (A ◦ ) c para cada A ⊂ X.d) A ◦ es abierto en X para cada A ⊂ X.e) Fr (Fr A) =Fr A para cada A ⊂ X.f )Fr (A ∪ B) =Fr A∪Fr B para cada A y cada B subconjuntos<strong>de</strong> X.g) Fr (A ∩ B) = Fr A∩ Fr B para cada A y cada B subconjuntos<strong>de</strong> X.h) Fr (A c ) = ( Fr A) c para cada A ⊂ X.i) (Fr A) ◦ = ∅ para cada A ⊂ X.4. Determine el interior, el exterior y la frontera <strong>de</strong> cada uno<strong>de</strong> los siguientes subconjuntos en R.a) Z.b) Q.c) R Q.d) (−1, 1].149
e) [1, ∞).f ){− 1 }n : n ∈ N .{ } 1g)n : n ∈ N ∪ {0}.5. Realice nuevamente el ejercicio anterior pero consi<strong>de</strong>randola topología <strong>de</strong> los complementos finitos sobre R.6. Suponga que τ 1 y τ 2 son dos topologías sobre un mismoconjunto X y que τ 1 es más fina que τ 2 . Compare el interiory la frontera <strong>de</strong> un subconjunto A <strong>de</strong> X en (X, τ 1 ) con suinterior y su frontera en (X, τ 2 ).Regresar150
Ejercicios 2.81. Demuestre que cualquier subespacio <strong>de</strong> un espacio discretoes discreto y cualquier subespacio <strong>de</strong> un espacio trivial estrivial.2. Sea A un subespacio <strong>de</strong> X. Demuestre cada una <strong>de</strong> lassiguientes afirmaciones:a) Un subconjunto F <strong>de</strong> A es cerado en A si y sólo siexiste K cerrado en X tal que F = K ∩ A.b) Si E ⊂ A y <strong>de</strong>notamos por Adh A E la adherencia <strong>de</strong> Een A y por Adh X E la adherencia <strong>de</strong> E en X, entoncesAdh A E =Adh X E ∩ A.c) Si a ∈ A, entonces V es una vecindad <strong>de</strong> a en A si y sólosi existe una vecindad U <strong>de</strong> a en X tal que V = U ∩ A.d) Si a ∈ A y si B(a) es un sistema fundamental <strong>de</strong> vecinda<strong>de</strong>s<strong>de</strong> a en X, entonces {U ∩ A : U ∈ B(a)} es unsistema fundamental <strong>de</strong> vecinda<strong>de</strong>s <strong>de</strong> a en A.e) Si E ⊂ A y <strong>de</strong>notamos por Int A E el interior <strong>de</strong> Een A y por Int X E el interior <strong>de</strong> E en X, entoncesInt A E ⊃Int X E ∩ A.f )RegresarSi E ⊂ A y <strong>de</strong>notamos por Fr A E la frontera <strong>de</strong> Een A y por Fr X E la frontera <strong>de</strong> E en X, entoncesFr A E ⊂Fr X E ∩ A.151
Ejercicios 3.11. Demuestre que toda función <strong>de</strong>finida <strong>de</strong> un espacio discretoX en cualquier espacio Y es continua y a<strong>de</strong>más que si cadafunción con dominio X es continua, entonces X tiene latopología discreta.2. Demuestre que toda función <strong>de</strong>finida <strong>de</strong> un X en un espacioY con topología grosera es continua y que si cada funcióncon codominio Y es continua, entonces Y tiene la topologíagrosera.3. Sea A un subconjunto <strong>de</strong> un conjunto X. La función característica<strong>de</strong> A, δ A : X −→ R, se <strong>de</strong>fine por{1 si x ∈ Aδ A (x) =0 si x /∈ A.Demuestre que si X es un espacio topológico y A ⊂ X,entonces la función característica <strong>de</strong> A es continua si y sólosi A es abierto y cerrado en X.4. Demuestre que si f y g son funciones continuas <strong>de</strong>finidas <strong>de</strong>un espacio X en R, entonces el conjunto {x ∈ X : f(x) =g(x)} es cerrado en X.5. Utilice el ejercicio anterior para justificar la siguiente afirmación:“Si dos funciones continuas <strong>de</strong>finidas <strong>de</strong> un espacioX en R coinci<strong>de</strong>n en un subconjunto <strong>de</strong>nso <strong>de</strong> X, coinci<strong>de</strong>nen todo X.6. Demuestre que si f : R −→ R es una función continua ysi f(a) < f(b) entonces para cada y ∈ [f(a), f(b)] existe xentre a y b tal que f(x) = y.152
7. Utilice el ejercicio anterior para probar que toda funcióncontinua <strong>de</strong>finida <strong>de</strong> R en R aplica intervalos en intervalos.8. Dé un ejemplo <strong>de</strong> una función <strong>de</strong>finida <strong>de</strong> R en R queaplique intervalos en intervalos y no sea una función continua.9. Sea f : X −→ Y una función continua. Determine cuáles<strong>de</strong> las siguientes afirmaciones son verda<strong>de</strong>ras y cu”ales sonfalsas, justificando en cada caso su respuesta con una <strong>de</strong>mostracióno un contraejemplo.a) Si A ⊂ X y x ∈ A, entonces f(x) ∈ f(A).b) Si A ⊂ X y x ∈ A ◦ , entonces f(x) ∈ f(A) ◦ .c) Si A ⊂ X y x ∈ A ′ , entonces f(x) ∈ (f(A)) ′ .10. Sean X un espacio topológico y (x n ) n∈N una sucesión en X(formalmente, una sucesión en X es una función <strong>de</strong> N enX). Decimos que (x n ) n∈N converge a un punto x ∈ X si ysólo si para toda vecindad V <strong>de</strong> x existe N ∈ N tal quex n ∈ V para cada n ≥ N.a) Demuestre que la sucesión(1 − 1 )nn∈Nconverge a 1 enR con la topología usual; pero que no converge si sobreR consi<strong>de</strong>ramos la topología generada por los intervalos<strong>de</strong> la forma (a, b].b) Demuestre que si X y Y son espacios métricos, entoncesuna función f : X −→ Y es continua si y sólo si paracada sucesión (x n ) n∈N que converge a un punto x ∈ X,la sucesión (f(x n )) n∈N converge a f(x) en Y .153
c) Sean X y Y espacios topológicos. Pruebe que si f :X −→ Y es continua, entonces para cada sucesión(x n ) n∈N que converge a un punto x ∈ X, la sucesión(f(x n )) n∈N converge a f(x) en Y .Regresar154
Ejercicios 3.21. Sean X y Y espacios topológicos y f : X −→ Y una funciónuno a uno y sobreyectiva. Demuestre que las siguientesafirmaciones son equivalentes:a) f es un homeomorfismo.b) Si A ⊂ X, entonces f(A) es abierto en Y si y sólo si Aes abierto en X.c) Si K ⊂ X, entonces f(K) es cerrado en Y si y sólo siK es cerrado en X.d) Si M ⊂ X, entonces f(M) = f(M).2. Pruebe que la relación ∼ <strong>de</strong>finida en los espacios topológicospor X ∼ Y si y sólo si X y Y son homeomorfos esuna relación <strong>de</strong> equivalencia.3. Muestre que cada intervalo abierto (a, b) en R, con a > bes homeomorfo al intervalo (0, 1).4. Muestre que cada intervalo cerrado [a, b] en R, con a > b eshomeomorfo al intervalo [0, 1].5. Defina un homeomorfismo <strong>de</strong> N con la topología discretaen Z también con la topología discreta.6. Sean τ 1 y τ 2 dos topologías <strong>de</strong>finidas sobre el mismo conjuntoX. Pruebe que la función idéntica Id X : (X, τ 1 ) −→(X, τ 2 ) es un homeomorfismo si y sólo si τ 1 = τ 2 .7. Pruebe que la propiedad <strong>de</strong> que cada función continua <strong>de</strong>valor real sobre un conjunto X tome un valor máximo esuna propiedad topológica.155
8. Utilice el ejercicio anterior para probar que [0, 1] y R no sonhomeomorfos.9. Muestre que la función f : R + −→ R <strong>de</strong>finida por f(x) =−x es una inmersión.Regresar156
Ejercicios 4.11. Demuestre que si Y tiene la topología grosera entonces latopología inicial sobre un conjunto X inducida por una funciónf : X −→ Y es la topología grosera.2. Suponga que Y tiene la topología discreta.a) Pruebe que la topología inicial sobre un conjunto Xinducida por una función uno a uno f : X −→ Y es latopología discreta.b) ¿Qué ocurre si f no es uno a uno?3. Consi<strong>de</strong>re la topología <strong>de</strong> los complementos contables <strong>de</strong>finidasobre el conjunto <strong>de</strong> los números reales. ¿Cuál es latopología inicial sobre Q inducida por la inclusión <strong>de</strong> Qen R?4. Resuelva el ejercicio anterior pero consi<strong>de</strong>rando R Q enlugar <strong>de</strong> Q.5. Consi<strong>de</strong>re la topología <strong>de</strong> las colas a la <strong>de</strong>recha <strong>de</strong>finidasobre el conjunto <strong>de</strong> los números enteros. ¿Cuál es latopología inicial sobre R inducida por la función parte entera,x ↦−→ [x] : R −→ Z?6. Consi<strong>de</strong>re la topología usual sobre el conjunto <strong>de</strong> los númerosreales. ¿Cuál es la topología inicial sobre R 2 inducida porla función que aplica a cada punto <strong>de</strong>l plano en su distanciausual al origen?7. Sean (Y, d) un espacio métrico y f : X −→ Y una función.Definimos la función m : X × X −→ R por m(x 1 , x 2 ) =d(f(x 1 ), f(x 2 )).157
a) Demuestre que m es una métrica sobre X si y sólo si fes uno a uno; y que en caso <strong>de</strong> no serlo, m resulta seruna seudométrica sobre X.b) Compare la topología generada por m sobre X con latopología inicial inducida por f.Regresar158
Ejercicios 4.21. Sean X y Y dos espacios topológicos y π 1 : X × Y −→ Xy y π 2 : X × Y −→ Y las proyecciones canónicas.a) Pruebe que π 1 y π 2 son funciones abiertas.b) Muestre con un ejemplo que π 1 y π 2 pue<strong>de</strong>n no serfunciones ceradas.2. Sea X un espacio con un número finito <strong>de</strong> puntos y sea Ycualquier espacio topológico. Demuestre que la proyecciónπ 2 : X × Y −→ Y es una aplicación cerrada.3. Sea X un espacio con la topología grosera y sea Y cualquierespacio topológico. Demuestre que la proyección π 2 : X ×Y −→ Y es una aplicación cerrada.4. Sean (X 1 , m 1 ), (X 2 , m 2 ), ..., (X 1 , m 1 ) espacios topológicos,X = X 1 ×X 2 ×...×X n , W un espacio topológico cualquieray para cada i = 1, ..., n sea f i : W −→ X i una funcióncontinua. Pruebe que la función f : W −→ X <strong>de</strong>finida porf(w) = (f 1 (w), ..., f n (w)) es continua.5. Sean (X 1 , m 1 ), (X 2 , m 2 ), ..., (X 1 , m 1 ) espacios métricos ysea X = X 1 × X 2 × ... × X n .a) Demuestre que la función m : X × X −→ R <strong>de</strong>finidapor∑m(x, y) = √ n m i (x i , y i ) 2 ,i=1don<strong>de</strong> x = (x 1 , x 2 , ..., x n ) y y = (y 1 , y 2 , ..., y n ), es unamétrica sobre X.159
) Demuestre que la topología producto sobre X es la mismatopología inducida por la métrica m.Regresar160
Ejercicios 4.31. Sea (X i ) i∈I una familia <strong>de</strong> espacios topológicos y sea X =∏i∈I X i. Demuestre que la proyección π i : X −→ X i es unaaplicación abierta para cada i ∈ I.2. Sean (X i )i ∈ I una familia <strong>de</strong> espacios topológicos, X =∏i∈N X i, W un espacio topológico arbitrario y para cadai ∈ I sea f i : W −→ X i una función continua. Demuestreque la función f : W −→ X <strong>de</strong>finida por f(w) = (f i (w)) i∈Ies continua.3. Sean (X i ) i∈I una familia <strong>de</strong> espacios topológicos,X = ∏ i∈I X i, π i : X −→ X i la proyección canónica paracada i ∈ I y consi<strong>de</strong>remos Y un subespacio <strong>de</strong> X. Para cadai ∈ I, <strong>de</strong>notemos por p i la restricción <strong>de</strong> p i al conjuntoY . Demuestre que la topología <strong>de</strong> subespacio sobre Y es latopología inicial inducida por la familia <strong>de</strong> funciones (p i ) i∈I .4. Sean (X i , m i ) i∈N una familia enumerable <strong>de</strong> espacios métricosy sea X = ∏ i∈N X i.a) Para cada i ∈ I, sea m i ∗ la métrica sobre X i <strong>de</strong>finidapor m i ∗ (a, b) = mín{1, m i (a, b)). Demuestre que lafunción m : X × X −→ R <strong>de</strong>finida porm(x, y) =∞∑i=1m i ∗ (x i , y i ),2don<strong>de</strong> x = (x i ) y y = (y i ), es una métrica sobre X.b) Demuestre que la topología producto sobre X es la mismatopología inducida por la métrica m.Regresar161
Ejercicios 4.41. Demuestre que si X tiene la topología grosera entonces latopología final sobre un conjunto Y inducida por una funciónf : X −→ Y no es necesariamente la topología grosera.2. Suponga que X tiene la topología discreta. Pruebe que latopología final sobre un conjunto Y inducida por una funciónf : X −→ Y es la topología discreta.3. Consi<strong>de</strong>re la topología <strong>de</strong> los complementos finitos <strong>de</strong>finidasobre el conjunto <strong>de</strong> los números racionales. ¿Cuál es latopología final sobre R inducida por la inclusión <strong>de</strong> Q enR?4. Resuelva el ejercicio anterior pero consi<strong>de</strong>rando R Q enlugar <strong>de</strong> Q y la topología <strong>de</strong> los complementos contablessobre R Q.5. Consi<strong>de</strong>re la topología <strong>de</strong> las colas a la <strong>de</strong>recha <strong>de</strong>finidasobre el conjunto <strong>de</strong> los números reales. ¿Cuál es latopología final sobre Z inducida por la función parte entera,x ↦−→ [x] : R −→ Z?6. Consi<strong>de</strong>re la topología usual sobre R 2 . ¿Cuál es la topologíafinal sobre R inducida por la función que aplica a cadapunto <strong>de</strong>l plano en su distancia usual al origen?Regresar162
Ejercicios 4.51. Demuestre que si f : X −→ Y es una función continua ysobreyectiva que es a<strong>de</strong>más abierta o cerrada, entonces fes una aplicación cociente.2. Sean X y Y espacios topológicos y consi<strong>de</strong>remos el espacioproducto X × Y . ¿Son las proyecciones canónicas, π 1 : X ×Y −→ X y π 2 : X × Y −→ Y , aplicaciones cociente?3. Suponga que f : X −→ Y una función continua. Si X tienela topología inicial inducida por f, ¿se pue<strong>de</strong> asegurar quef es una aplicación cociente? Justifique su respuesta conuna <strong>de</strong>mostración o un contraejemplo.4. Dé un ejemplo <strong>de</strong> una aplicación cociente que no sea niabierta ni cerrada.5. Definimos la relación ∼ en el plano por (x 0 , y 0 ) ∼ (x 1 , y 1 )si y sólo si y 0 = y 1 .a) Muestre que ∼ es una relación <strong>de</strong> equivalencia.b) Determine la clase <strong>de</strong> equivalencia <strong>de</strong> un punto (x, y)<strong>de</strong>l plano.c) Pruebe que el espacio cociente R/∼ es homeomorfo aR.6. Dé un ejemplo <strong>de</strong> una función continua y sobreyectiva queno sea una aplicación cociente.Regresar163
Ejercicios 5.11. Demuestre que cualquier conjunto X con la topología <strong>de</strong>complementos finitos (resp. contables) es un espacio T 0 .2. Demuestre que cualquier conjunto X totalmente or<strong>de</strong>nado,con la topología <strong>de</strong> las colas a la <strong>de</strong>recha es un espacio T 0 .3. Pruebe que el espacio <strong>de</strong> Sierpinski <strong>de</strong> tres puntos, C ={0, 1, 2} con la topología {∅, {0}, C}, no es un espacioT 0 .4. Sea X un espacio topológico cualquiera y sea ∼ la relación<strong>de</strong>finida sobre X por x ∼ y si y sólo si {x} = {y}. Demuestrelos siguientes hechos:a) ∼ es una relación <strong>de</strong> equivalencia sobre X.b) El espacio cociente X/∼ es un espacio T 0 .5. Demuestre que los siguientes espacios son T 1 .a) Cualquier conjunto con la topología <strong>de</strong> los complementosfinitos (resp. contables).b) Todo espacio discreto.c) El plano <strong>de</strong> Moore.d) El plano ranurado.e) Los números reales con la topología para la cual cadanúmero real x distinto <strong>de</strong> 0 tiene como sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s los intervalos abiertos centradosen x, mientras que las vecinda<strong>de</strong>s fundamentales <strong>de</strong>0 son los conjuntos <strong>de</strong> la forma (−∞, −n) ∪ (−ɛ, ɛ) ∪(n, ∞), don<strong>de</strong> n ∈ N y ɛ > 0.164
6. Pruebe que el espacio <strong>de</strong> Sierpinski no es un espacio T 1 .7. Sea X un conjunto or<strong>de</strong>nado y consi<strong>de</strong>re la topología <strong>de</strong> lascolas a <strong>de</strong>recha <strong>de</strong>finida sobre X. Demuestre que X no esun espacio T 1 .8. Demuestre que todo subespacio <strong>de</strong> un espacio T 1 es un espacioT 1 .9. Demuestre que un producto arbitrario <strong>de</strong> espacios T 1 novacíos es un espacio T 1 si y sólo si cada uno <strong>de</strong> los factoreslo es.Regresar165
Ejercicios 5.21. Determine cuáles <strong>de</strong> los siguientes espacios son <strong>de</strong> Hausdorff.En cada caso justifique plenamente su respuesta.a) El plano <strong>de</strong> Moore.b) El plano ranurado.c) Los números reales con la topología para la cual cadanúmero real x distinto <strong>de</strong> 0 tiene como sistema fundamental<strong>de</strong> vecinda<strong>de</strong>s los intervalos abiertos centradosen x, mientras que las vecinda<strong>de</strong>s fundamentales <strong>de</strong>0 son los conjuntos <strong>de</strong> la forma (−∞, −n) ∪ (−ɛ, ɛ) ∪(n, ∞), don<strong>de</strong> n ∈ N y ɛ > 0.2. Demuestre que todo subespacio <strong>de</strong> un espacio <strong>de</strong> Hausdorffes un espacio <strong>de</strong> Hausdorff.3. Demuestre que un producto arbitrario <strong>de</strong> espacios <strong>de</strong> Hausdorffno vacíos es un espacio <strong>de</strong> Hausdorff si y sólo si cadauno <strong>de</strong> los factores lo es.4. Recuer<strong>de</strong> que una sucesión (x n ) n∈N en un espacio topológicoX converge a un punto x ∈ X si y sólo si para cada vecindadV <strong>de</strong> x existe N ∈ N <strong>de</strong> tal manera que x n ∈ V para cadan ≥ N.a) Demuestre que si X es un espacio <strong>de</strong> Hausdorff entoncescada sucesión en X converge a lo más a un punto <strong>de</strong>X.b) Consi<strong>de</strong>re X = R con la topología <strong>de</strong> los complementosfinitos. Demuestre que existen sucesiones en X queconvergen a más <strong>de</strong> un punto simultáneamente.166
5. Demuestre que el espacio topológico X es un espacio <strong>de</strong>Hausdorff si y sólo si la diagonal ∆ = {(x, x) : x ∈ X} escerrada en X × X. (Una <strong>de</strong>mostración elegante se obtieneconsi<strong>de</strong>rando la función idéntica <strong>de</strong> X en X y utilizandolos resultados <strong>de</strong> las proposiciones 5.2.3 y 5.2.4.)6. Demuestre que si f es una función continua y abierta <strong>de</strong> Xsobre Y , entonces Y es un espacio <strong>de</strong> Hausdorff si y sólo si{(x 1 , x 2 ) : f(x 1 ) = f(x 2 )} es cerrado en X × X.7. Demuestre que si f y g son funciones continuas <strong>de</strong>finidas<strong>de</strong> X en Y y si Y es un espacio <strong>de</strong> Hausdorff, entonces elconjunto {x : f(x) = g(x)} es cerrado en X.8. Demuestre que si f y g son funciones continuas <strong>de</strong>finidas<strong>de</strong> X en Y , si Y es un espacio <strong>de</strong> Hausdorff, y si f y gcoinci<strong>de</strong>n en un subconjunto <strong>de</strong>nso <strong>de</strong> X, entonces f = g.Regresar167
Ejercicios 5.31. Consi<strong>de</strong>remos R con la topología τ = {∅, Q, R Q, R}.Pruebe que (R, τ) es un espacio regular que no es un espacio<strong>de</strong> Hausdorff.2. Pruebe que un espacio regular es un espacio <strong>de</strong> Hausdorffsi y sólo si es T 1 .3. Determine si el plano <strong>de</strong> Moore es o no un espacio regular.4. Sea τ la topología usual sobre el conjunto <strong>de</strong> los númerosreales y τ∗ = τ ∪ {Q ∪ U : U ∈ τ}.a) Pruebe que τ∗ es una topología sobre R.b) Demuestre que (R, τ∗) es un espacio <strong>de</strong> Hausdorff.c) Demuestre que (R, τ∗) no es regular. (Sugerencia: observeque Q es abierto en (R, τ∗) y que ningún punto<strong>de</strong> Q se pue<strong>de</strong> separar <strong>de</strong> R Q con conjuntos abiertosdisyuntos.)5. Demuestre que todo subespacio <strong>de</strong> un espacio regular (resp.T 3 ) es un espacio regular (resp. T 3 ).6. Demuestre que un producto arbitrario <strong>de</strong> espacios regulares(resp. T 3 ) no vacíos es un espacio regular (resp. T 3 ), si ysólo si cada uno <strong>de</strong> los factores lo es.Regresar168
Ejercicios 5.41. Demuestre que todo espacio seudométrico es completamenteregular.2. Demuestre que todo espacio métrico es un espacio <strong>de</strong> Tychonoff.3. Sea τ la topología sobre R en la cual las vecinda<strong>de</strong>s básicas<strong>de</strong> cada número real x ≠ 0 son los intervalos abiertosusuales centrados en x mientras que las vecinda<strong>de</strong>s básicas<strong>de</strong> 0 son los conjuntos <strong>de</strong> la forma (−ɛ, ɛ) ∪ (−∞, −n) ∪(n, ∞), don<strong>de</strong> ɛ > 0 y n es un entero positivo. Muestre queel espacio (R, τ) es un espacio <strong>de</strong> Tychonoff.4. Demuestre que el plano <strong>de</strong> Moore es un espacio <strong>de</strong> Tychonoff.5. Demuestre que cada subespacio <strong>de</strong> un espacio completamenteregular (resp. <strong>de</strong> un espacio <strong>de</strong> Tychonoff) es completamenteregular. (resp. <strong>de</strong> Tychonoff).6. Demuestre que un producto no vacío <strong>de</strong> espacios topológicoses completamente regular (resp. <strong>de</strong> Tychonoff) si y sólosi cada factor es un espacio completamente regular (resp.un espacio <strong>de</strong> Tychonoff).7. Pruebe que un espacio topoloógico X es completamenteregular si y sólo si tiene la topología inicial inducida por sufamilia C ∗ (X) <strong>de</strong> funciones continuas y acotadas <strong>de</strong>finidas<strong>de</strong> X en R.8. Cualquier producto <strong>de</strong> intervalos cerrados y acotados en Rrecibe el nombre <strong>de</strong> cubo. Pruebe que un espacio topológico169
X es un espacio <strong>de</strong> Tychonoff si y sólo si es homeomorfo a unsubespacio <strong>de</strong> algún cubo. (Sugerencia: Si X es un espacio<strong>de</strong> Tychonoff, utilice el ejercicio anterior. Observe que cadafunción f ∈ C ∗ (X) tiene como rango un subconjunto <strong>de</strong>un intervalo cerrado y acotado I f y consi<strong>de</strong>re la funciónevaluación e : X −→ ∏ I f <strong>de</strong>finida por [e(x)] f = f(x)).Regresar170
Ejercicios 5.51. Demuestre que un espacio topológico X es normal si y sólosi para cada K subconjunto cerrado <strong>de</strong> X y cada subconjuntoabierto U <strong>de</strong> X tal que K ⊂ U, existe un conjuntoabierto V en X tal que K ⊂ V y V ⊂ U.2. Sea (X, ≤) un conjunto or<strong>de</strong>nado. Recuer<strong>de</strong> que los conjuntos<strong>de</strong> la forma {x ∈ X : x < a} junto con los conjuntos<strong>de</strong> la forma {x ∈ X : a > x} forman una subbase para unatopología sobre X con la cual X es un espacio or<strong>de</strong>nado.Demuestre que todo espacio or<strong>de</strong>nado es T 4 .3. Consi<strong>de</strong>remos sobre X = R la topología τ para la cual lasvecinda<strong>de</strong>s básicas <strong>de</strong> x son los intervalos <strong>de</strong> la forma [x, y)con y > x. Pruebe que el espacio (X, τ) es normal. ¿Es ésteun espacio T 4 ?4. Pruebe que si X es el espacio <strong>de</strong>l ejercicio anterior, entoncesX ×X no es normal. (Sugerencia: Utilice el Lema <strong>de</strong> Jones.)5. Demuestre que todo subespacio cerrado <strong>de</strong> un espacio normal(resp. <strong>de</strong> un espacio T 4 ) es normal (resp. T 4 ).6. Suponga que X y Y son espacios topológicos y que X × Yes un espacio normal. ¿Son X y Y espacios normales? Justifiquesu respuesta con una <strong>de</strong>mostración o con un contraejemplo.Regresar171
Ejercicios 5.61. Suponga que A es conjunto cerrado <strong>de</strong> un espacio topológicoX. Muestre que cualquier función f : A −→ R se pue<strong>de</strong>exten<strong>de</strong>r a todo X.2. Suponga que A es conjunto cerrado <strong>de</strong> un espacio métricoX. Muestre que cualquier función f : A −→ R n se pue<strong>de</strong>exten<strong>de</strong>r a todo X. ¿Qué suce<strong>de</strong> si X no es un espaciométrico?3. Encuentre una función continua <strong>de</strong>finida <strong>de</strong> R 2 {(0, 0)}en [−1, 1] que no se pueda exten<strong>de</strong>r a todo el plano R 2 .Regresar172
Ejercicios 5.71. Pruebe que el Plano <strong>de</strong> Moore es un espacio 1-enumerablepero que no es 2-enumerable. ¿Es este espacio separable?2. Pruebe que el conjunto <strong>de</strong> los números reales con la topologíagenerada por los intervalos <strong>de</strong> la forma (a, b] es un espacio1-enumerable. ¿Es este espacio 2-enumerable? ¿Es separable?3. Dé un ejemplo <strong>de</strong> un espacio métrico 1-enumerable que nosea 2-enumerable.4. Dé un ejemplo <strong>de</strong> un espacio métrico que no sea separable.5. Pruebe que cualquier subespacio <strong>de</strong> un espacio 1-enumerable(resp. 2-enumerable) es 1-enumerable (resp. 2-enumerable).6. Pruebe que el producto <strong>de</strong> cualquier colección enumerable<strong>de</strong> espacios 1-enumerables (resp. 2-enumerable) es 1-enumerable(resp. 2-enumerable). ¿Qué ocurre si la colección noes enumerable?7. ¿Es cada subespacio <strong>de</strong> un espacio separable también separable?8. ¿Es el producto <strong>de</strong> una colección <strong>de</strong> espacios separablestambién separable?9. Muestre que si X es 2-enumerable, entonces cualquier colección<strong>de</strong> subconjuntos abiertos y disyuntos <strong>de</strong> x es enumerable.173
10. Sea X un espacio 2-enumerable. Pruebe que si A ⊂ X esno enumerable, entonces la topología <strong>de</strong> subespacio <strong>de</strong> Ano es la topología discreta.11. Muestre que si X es un espacio métrico separable, entoncesX es 2-enumerable.Regresar174