

KR 5 sixx R650, R850 - KUKA Robotics
KR 5 sixx R650, R850 - KUKA Robotics
KR 5 sixx R650, R850 - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>KR</strong> 5 <strong>sixx</strong> <strong>R650</strong>, <strong>R850</strong><br />
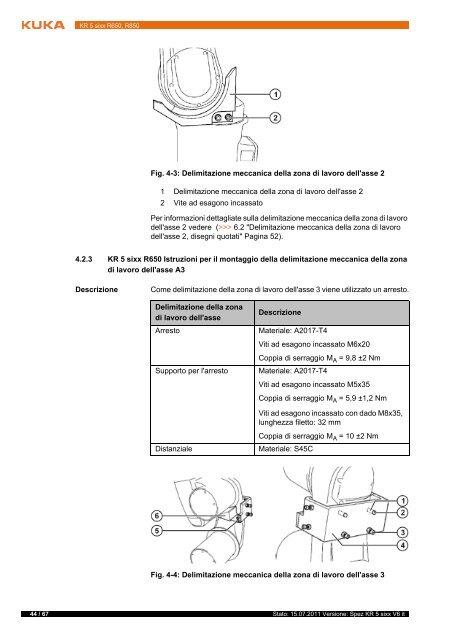
Fig. 4-3: Delimitazione meccanica della zona di lavoro dell'asse 2<br />
1 Delimitazione meccanica della zona di lavoro dell'asse 2<br />
2 Vite ad esagono incassato<br />
Per informazioni dettagliate sulla delimitazione meccanica della zona di lavoro<br />
dell'asse 2 vedere (>>> 6.2 "Delimitazione meccanica della zona di lavoro<br />
dell'asse 2, disegni quotati" Pagina 52).<br />
4.2.3 <strong>KR</strong> 5 <strong>sixx</strong> <strong>R650</strong> Istruzioni per il montaggio della delimitazione meccanica della zona<br />
di lavoro dell'asse A3<br />
Descrizione Come delimitazione della zona di lavoro dell'asse 3 viene utilizzato un arresto.<br />
Delimitazione della zona<br />
Descrizione<br />
di lavoro dell'asse<br />
Arresto Materiale: A2017-T4<br />
Viti ad esagono incassato M6x20<br />
Coppia di serraggio MA = 9,8 ±2 Nm<br />
Supporto per l'arresto Materiale: A2017-T4<br />
Viti ad esagono incassato M5x35<br />
Coppia di serraggio MA = 5,9 ±1,2 Nm<br />
Viti ad esagono incassato con dado M8x35,<br />
lunghezza filetto: 32 mm<br />
Coppia di serraggio MA = 10 ±2 Nm<br />
Distanziale Materiale: S45C<br />
Fig. 4-4: Delimitazione meccanica della zona di lavoro dell'asse 3<br />
44 / 67 Stato: 15.07.2011 Versione: Spez <strong>KR</strong> 5 <strong>sixx</strong> V6 it














