

KR 5 sixx R650, R850 - KUKA Robotics
KR 5 sixx R650, R850 - KUKA Robotics
KR 5 sixx R650, R850 - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>KR</strong> 5 <strong>sixx</strong> <strong>R650</strong>, <strong>R850</strong><br />
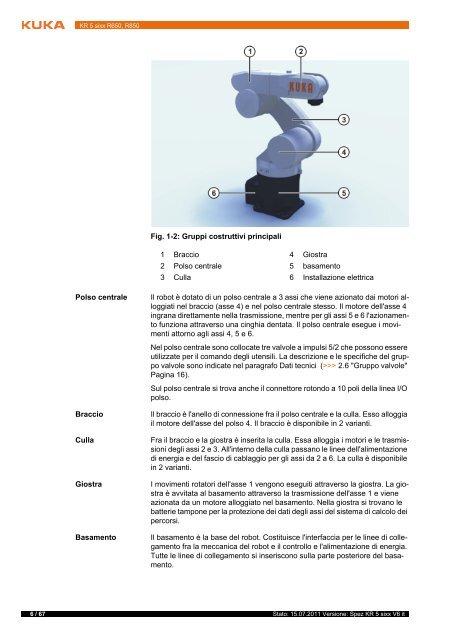
Fig. 1-2: Gruppi costruttivi principali<br />
1 Braccio 4 Giostra<br />
2 Polso centrale 5 basamento<br />
3 Culla 6 Installazione elettrica<br />
Polso centrale Il robot è dotato di un polso centrale a 3 assi che viene azionato dai motori alloggiati<br />
nel braccio (asse 4) e nel polso centrale stesso. Il motore dell'asse 4<br />
ingrana direttamente nella trasmissione, mentre per gli assi 5 e 6 l'azionamento<br />
funziona attraverso una cinghia dentata. Il polso centrale esegue i movimenti<br />
attorno agli assi 4, 5 e 6.<br />
Nel polso centrale sono collocate tre valvole a impulsi 5/2 che possono essere<br />
utilizzate per il comando degli utensili. La descrizione e le specifiche del gruppo<br />
valvole sono indicate nel paragrafo Dati tecnici (>>> 2.6 "Gruppo valvole"<br />
Pagina 16).<br />
Sul polso centrale si trova anche il connettore rotondo a 10 poli della linea I/O<br />
polso.<br />
Braccio Il braccio è l'anello di connessione fra il polso centrale e la culla. Esso alloggia<br />
il motore dell'asse del polso 4. Il braccio è disponibile in 2 varianti.<br />
Culla Fra il braccio e la giostra è inserita la culla. Essa alloggia i motori e le trasmissioni<br />
degli assi 2 e 3. All'interno della culla passano le linee dell'alimentazione<br />
di energia e del fascio di cablaggio per gli assi da 2 a 6. La culla è disponibile<br />
in 2 varianti.<br />
Giostra I movimenti rotatori dell'asse 1 vengono eseguiti attraverso la giostra. La giostra<br />
è avvitata al basamento attraverso la trasmissione dell'asse 1 e viene<br />
azionata da un motore alloggiato nel basamento. Nella giostra si trovano le<br />
batterie tampone per la protezione dei dati degli assi del sistema di calcolo dei<br />
percorsi.<br />
Basamento Il basamento è la base del robot. Costituisce l'interfaccia per le linee di collegamento<br />
fra la meccanica del robot e il controllo e l'alimentazione di energia.<br />
Tutte le linee di collegamento si inseriscono sulla parte posteriore del basamento.<br />
6 / 67 Stato: 15.07.2011 Versione: Spez <strong>KR</strong> 5 <strong>sixx</strong> V6 it














