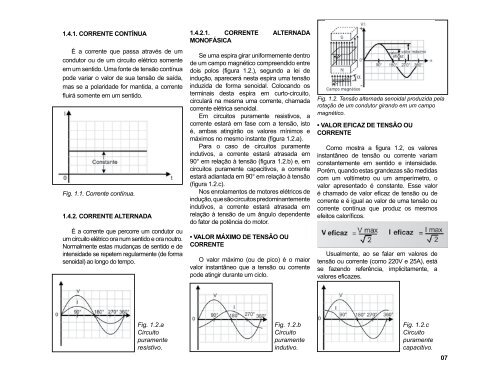
1.4.1. CORRENTE CONTÍNUA 1.4.2.1. CORRENTE ALTERNADA MONOFÁSICA Noções Gerais 1 O nome “motor de indução” se deriva do fato de que as correntes que circulam no secundário (rotor) são induzidas por correntes alternadas que circulam no primário 1.1. MOTORES ELÉTRICOS A primeira indicação de que poderia haver um intercâmbio entre energia elétrica e energia mecânica foi mostrada por Michael Faraday em 1831, através da lei da indução eletromagnética, considerada uma das maiores descobertas individuais para o progresso da ciência e aperfeiçoamento da humanidade. Baseando-se nos estudos de Faraday, o físico italiano Galileu Ferraris, em 1885, desenvolveu o motor elétrico assíncrono de corrente alternada. Com uma construção simples, versátil e de baixo custo, aliado ao fato de utilizar como fonte de alimentação a energia elétrica, o motor elétrico é hoje o meio mais indicado para a transformação de energia elétrica em mecânica. 1.2. TIPOS DE MOTORES ELÉTRICOS Através dos tempos, foram desenvolvidos vários tipos de motores elétricos para atender as necessidades do mercado. A tabela ao lado mostra de modo geral os diversos tipos de motores hoje existentes. (estator). Os efeitos eletromagnéticos combinados das correntes do estator e do rotor produzem a força que gera o movimento. É a corrente que passa através de um condutor ou de um circuito elétrico somente em um sentido. Uma fonte de tensão contínua pode variar o valor de sua tensão de saída, mas se a polaridade for mantida, a corrente fluirá somente em um sentido. Fig. 1.1. Corrente contínua. 1.4.2. CORRENTE ALTERNADA É a corrente que percorre um condutor ou um circuito elétrico ora num sentido e ora noutro. Normalmente estas mudanças de sentido e de intensidade se repetem regularmente (de forma senoidal) ao longo do tempo. Se uma espira girar uniformemente dentro de um campo magnético compreendido entre dois polos (figura 1.2.), segundo a lei de indução, aparecerá nesta espira uma tensão induzida de forma senoidal. Colocando os terminais desta espira em curto-circuito, circulará na mesma uma corrente, chamada corrente elétrica senoidal. Em circuitos puramente resistivos, a corrente estará em fase com a tensão, isto é, ambas atingirão os valores mínimos e máximos no mesmo instante (figura 1.2.a). Para o caso de circuitos puramente indutivos, a corrente estará atrasada em 90° em relação à tensão (figura 1.2.b) e, em circuitos puramente capacitivos, a corrente estará adiantada em 90° em relação à tensão (figura 1.2.c). Nos enrolamentos de motores elétricos de indução, que são circuitos predominantemente indutivos, a corrente estará atrasada em relação à tensão de um ângulo dependente do fator de potência do motor. • VALOR MÁXIMO DE TENSÃO OU CORRENTE O valor máximo (ou de pico) é o maior valor instantâneo que a tensão ou corrente pode atingir durante um ciclo. Fig. 1.2. Tensão alternada senoidal produzida pela rotação de um condutor girando em um campo magnético. • VALOR EFICAZ DE TENSÃO OU CORRENTE Como mostra a figura 1.2, os valores instantâneo de tensão ou corrente variam constantemente em sentido e intensidade. Porém, quando estas grandezas são medidas com um voltímetro ou um amperímetro, o valor apresentado é constante. Esse valor é chamado de valor eficaz de tensão ou de corrente e é igual ao valor de uma tensão ou corrente contínua que produz os mesmos efeitos caloríficos. Usualmente, ao se falar em valores de tensão ou corrente (como 220V e 25A), está se fazendo referência, implicitamente, a valores eficazes. 1.3. MOTOR DE INDUÇÃO De todos os tipos de motores elétricos existentes, este é o mais simples e robusto. É constituído basicamente de dois conjuntos: estator bobinado e conjunto do rotor. 06 07 Fig. 1.2.a Circuito puramente resistivo. Fig. 1.2.b Circuito puramente indutivo. Fig. 1.2.c Circuito puramente capacitivo.