Cercetare de Ex - Institutul de Mecanica Solidelor
Cercetare de Ex - Institutul de Mecanica Solidelor
Cercetare de Ex - Institutul de Mecanica Solidelor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Procedura <strong>de</strong> minimizare modifică iterativ cei şapte parametri până se obţine minimizarea<br />
următoarei funcţii obiectiv:<br />
N<br />
∑<br />
sim k exp k<br />
Ξ= ⎡htip ( P ) −htip<br />
( P ) ⎤<br />
⎣ ⎦<br />
k = 1<br />
sim k<br />
un<strong>de</strong> N este numărul <strong>de</strong> puncte <strong>de</strong> comparaţie, hvarf ( P ) este valoarea simulată a adâncimii <strong>de</strong><br />
k<br />
k<br />
pătrun<strong>de</strong>re a capului in<strong>de</strong>nterului în material pentru o apăsare cu forţa P , la timpul t , iar<br />
exp k<br />
k<br />
hvarf ( P ) este valoarea experimentală a adâncimii <strong>de</strong> pătrun<strong>de</strong>re pentru forţa <strong>de</strong> apăsare P .<br />
Procedura <strong>de</strong> minimizare folosită constă în aplicarea succesivă a două meto<strong>de</strong> <strong>de</strong> tip<br />
gradient, şi anume mai întăi metoda Gauss-Newton şi apoi metoda Levenberg-Marquardt<br />
(Nocedal şi Wright 1999, Ponthot şi Kleinermann 2006). Au fost folosite subrutinele Gauss-<br />
Newton şi Levenberg-Marquardt ale librăriei Fortran IMSL (Visual Numerics Inc. 1997).<br />
Metoda Gauss-Newton constă în următoarea corectare iterativă:<br />
p+ 1 p p p −1<br />
p<br />
x = x −µ [ H ] ( ∇Ξ)<br />
,<br />
⎡∂Ξ ∂Ξ ∂Ξ ∂Ξ ∂Ξ ∂Ξ ∂Ξ ⎤<br />
un<strong>de</strong> p este numărul iteraţiei, ∇Ξ = ⎢ y,0<br />
* * ⎥ este<br />
⎣∂E ∂ν ∂σ ∂R ∂β ∂Hkin ∂Hnl⎦<br />
p<br />
gradientul funcţiei obiectiv, H este matricea Hessiană iar p µ este un parametru <strong>de</strong> căutare a<br />
p −1 p<br />
celei mai mici valori a funcţiei obiectiv Ξ <strong>de</strong>-a lungul direcţiei <strong>de</strong> căutare [ H ] ( ∇Ξ)<br />
.<br />
Metoda Levenberg-Marquardt constă în următoarea corectare iterativă a vectorului x:<br />
p+ 1 p p T p p −1<br />
p T p<br />
x = x − [( J ) J +ξ I] ( J ) Ξ ,<br />
un<strong>de</strong> Jacobianul ( ) T<br />
J = ∇Ξ , iar p ξ este un parametru <strong>de</strong> căutare al celei mai mici valori a<br />
funcţiei obiectiv <strong>de</strong>-a lungul direcţiei <strong>de</strong> căutare. De remarcat faptul că matricile<br />
2<br />
,<br />
T<br />
p<br />
H şi<br />
p T p p −1<br />
p T<br />
[( J ) J +ξ I] ( J ) trebuie să fie pozitiv <strong>de</strong>finite pentru ca direcţia <strong>de</strong> căutare să fie o<br />
direcţie <strong>de</strong>scen<strong>de</strong>ntă, <strong>de</strong> diminuare a funcţiei obiectiv.<br />
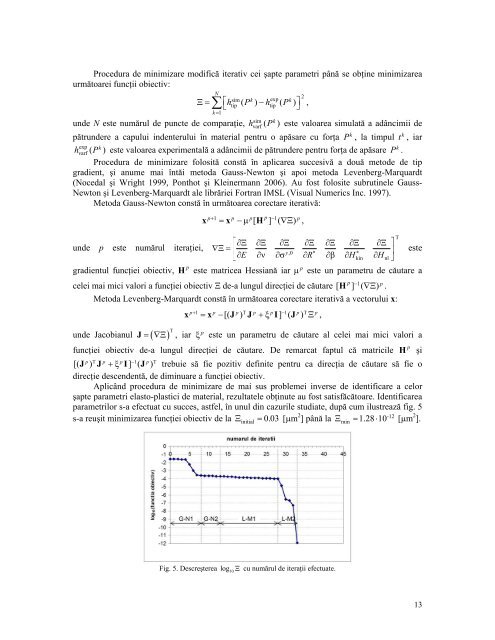
Aplicând procedura <strong>de</strong> minimizare <strong>de</strong> mai sus problemei inverse <strong>de</strong> i<strong>de</strong>ntificare a celor<br />
şapte parametri elasto-plastici <strong>de</strong> material, rezultatele obţinute au fost satisfăcătoare. I<strong>de</strong>ntificarea<br />
parametrilor s-a efectuat cu succes, astfel, în unul din cazurile studiate, după cum ilustrează fig. 5<br />
s-a reuşit minimizarea funcţiei obiectiv <strong>de</strong> la Ξ initial = 0.03 [µm 2 -12<br />
] până la Ξ = 1.28⋅ 10 [µm 2 ].<br />
Fig. 5. Descreşterea log10 Ξ cu numărul <strong>de</strong> iteraţii efectuate.<br />
min<br />
13