GÜDEL Press Automation
GÜDEL Press Automation
GÜDEL Press Automation

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
nwendungsbeispiel -<br />
pplication -<br />
pplication -<br />
utomobilindustrie industrie automobile utomotive industry<br />
ufgabenstellung<br />
Vollautomatisches Einstapeln von grossformatigen<br />
labilen Aussenhautteilen in Sonderladungsträger<br />
im Anschluss an eine <strong>Press</strong>enstrasse.<br />
Schutz der Teile in den Magazinen<br />
durch Einlegen von Zwischenlagenstreifen.<br />
Automatische Verstellbarkeit der Fördersysteme<br />
sowie vollautomatischer Toolingwechsel<br />
sind ebenfalls integriert.<br />
lösung<br />
Nach der <strong>Press</strong>e werden über zwei Gurtförderbänder<br />
wechselweise Teile bereitgestellt.<br />
Für den Abstapelvorgang sind zwei Roboter<br />
Typ Güdel roboFlex als Teiletransfer hin zum<br />
Einstapelportal, einem Flächenportal der<br />
Baureihe FP5, eingesetzt. Die Lageerkennung<br />
erfolgt über ein Kamerasystem, welches die<br />
Daten direkt den Robotern zur exakten Positionierung<br />
übermittelt. Ein weiteres parallel<br />
arbeitendes Portal übernimmt das Einlegen<br />
der Zwischenlagenstreifen.<br />
Die Ladungsträger, sowie die Magazine mit den<br />
Zwischenlagen werden automatisch und ohne<br />
Produktionsunterbruch zu- und weggeführt.<br />
Fig. 1<br />
tâche<br />
Stockage automatique de grandes pièces de carrosserie<br />
a faible rigidité dans un containeur de<br />
chargement spécial en fin de ligne de presses. Protection<br />
des pièces dans le containeur par insertion<br />
d’intercalaire. Réglage automatique des systèmes<br />
de convoyage et remplacement automatique des<br />
outils.<br />
solution<br />
En bout de ligne les pièces sont évacuées en alternance<br />
au moyen de deux convoyeurs à bandes.<br />
Les pièces sont ensuite saisies alternativement par<br />
deux robots de type roboFlex <strong>GÜDEL</strong> et transportées<br />
vers le portique de stockage de type FP5<br />
<strong>GÜDEL</strong>. Les éléments stockés sont détectés par<br />
un système de caméras, qui transmet les données<br />
directement aux robots en vue d'un positionnement<br />
précis. Un autre portique, travaillant en<br />
parallèle, se charge d'insérer les intercalaires entre<br />
chaque pièce.<br />
Les palettes de chargement ainsi que les containeurs<br />
sont amenées et sorties en mode automatique<br />
sans interruption de la production.<br />
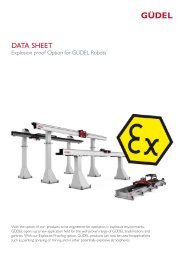
task<br />
Fully automatic stacking of large-format, unstable<br />
outer body shells on special load carriers at the<br />
end of a press conveyor system. The protection<br />
of magazined parts by using interlayer strips.<br />
Automatic adjustment of conveyor system, as well<br />
as fully automatic tooling changes.<br />
solution<br />
After the press, the parts are alternately positioned<br />
on two conveyor belts. For destacking, two<br />
<strong>GÜDEL</strong> roboFlex robots are used to transfer the<br />
parts to the stacking gantry, a FP5 series area gantry.<br />
Position recognition is performed with a vision<br />
system, which directly transmits the data to the<br />
robots for exact positioning. An additional parallel<br />
working gantry inserts the interlayer strips.<br />
The load carriers and the magazines with the interlayer<br />
strips are conveyed in and out without<br />
intermediate storage and without interrupting<br />
production.