messtechnik & emv - EuE24.net
messtechnik & emv - EuE24.net
messtechnik & emv - EuE24.net

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
M E S S T E C H N I K & E M V<br />
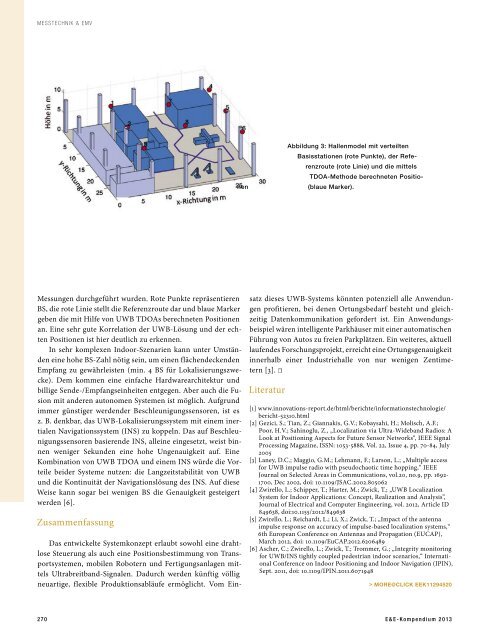
Abbildung 3: Hallenmodel mit verteilten<br />
Basisstationen (rote Punkte), der Referenzroute<br />
(rote Linie) und die mittels<br />
TDOA-Methode berechneten Positio-<br />
(blaue Marker).<br />
nen<br />
Messungen durchgeführt wurden. Rote Punkte repräsentieren<br />
BS, die rote Linie stellt die Referenzroute dar und blaue Marker<br />
geben die mit Hilfe von UWB TDOAs berechneten Positionen<br />
an. Eine sehr gute Korrelation der UWB-Lösung und der echten<br />
Positionen ist hier deutlich zu erkennen.<br />
In sehr komplexen Indoor-Szenarien kann unter Umständen<br />
eine hohe BS-Zahl nötig sein, um einen flächendeckenden<br />
Empfang zu gewährleisten (min. 4 BS für Lokalisierungszwecke).<br />
Dem kommen eine einfache Hardwarearchitektur und<br />
billige Sende-/Empfangseinheiten entgegen. Aber auch die Fusion<br />
mit anderen autonomen Systemen ist möglich. Aufgrund<br />
immer günstiger werdender Beschleunigungssensoren, ist es<br />
z. B. denkbar, das UWB-Lokalisierungssystem mit einem inertialen<br />
Navigationssystem (INS) zu koppeln. Das auf Beschleunigungssensoren<br />
basierende INS, alleine eingesetzt, weist binnen<br />
weniger Sekunden eine hohe Ungenauigkeit auf. Eine<br />
Kombination von UWB TDOA und einem INS würde die Vorteile<br />
beider Systeme nutzen: die Langzeitstabilität von UWB<br />
und die Kontinuität der Navigationslösung des INS. Auf diese<br />
Weise kann sogar bei wenigen BS die Genauigkeit gesteigert<br />
werden [6].<br />
Zusammenfassung<br />
Das entwickelte Systemkonzept erlaubt sowohl eine drahtlose<br />
Steuerung als auch eine Positionsbestimmung von Transportsystemen,<br />
mobilen Robotern und Fertigungsanlagen mittels<br />
Ultrabreitband-Signalen. Dadurch werden künftig völlig<br />
neuartige, flexible Produktionsabläufe ermöglicht. Vom Ein-<br />
satz dieses UWB-Systems könnten potenziell alle Anwendungen<br />
profitieren, bei denen Ortungsbedarf besteht und gleichzeitig<br />
Datenkommunikation gefordert ist. Ein Anwendungsbeispiel<br />
wären intelligente Parkhäuser mit einer automatischen<br />
Führung von Autos zu freien Parkplätzen. Ein weiteres, aktuell<br />
laufendes Forschungsprojekt, erreicht eine Ortungsgenauigkeit<br />
innerhalb einer Industriehalle von nur wenigen Zentimetern<br />
[3]. ☐<br />
Literatur<br />
[1] www.innovations-report.de/html/berichte/informationstechnologie/<br />
bericht-52310.html<br />
[2] Gezici, S.; Tian, Z.; Giannakis, G.V.; Kobaysahi, H.; Molisch, A.F.;<br />
Poor, H.V.; Sahinoglu, Z., „Localization via Ultra-Wideband Radios: A<br />
Look at Positioning Aspects for Future Sensor Networks“, IEEE Signal<br />
Processing Magazine, ISSN: 1053-5888, Vol. 22, Issue 4, pp. 70-84, July<br />
2005<br />
[3] Laney, D.C.; Maggio, G.M.; Lehmann, F.; Larson, L.; „Multiple access<br />
for UWB impulse radio with pseudochaotic time hopping,“ IEEE<br />
Journal on Selected Areas in Communications, vol.20, no.9, pp. 1692-<br />
1700, Dec 2002, doi: 10.1109/JSAC.2002.805062<br />
[4] Zwirello, L.; Schipper, T.; Harter, M.; Zwick, T.; „UWB Localization<br />
System for Indoor Applications: Concept, Realization and Analysis”,<br />
Journal of Electrical and Computer Engineering, vol. 2012, Article ID<br />
849638, doi:10.1155/2012/849638<br />
[5] Zwirello, L.; Reichardt, L.; Li, X.; Zwick, T.; „Impact of the antenna<br />
impulse response on accuracy of impulse-based localization systems,“<br />
6th European Conference on Antennas and Propagation (EUCAP),<br />
March 2012, doi: 10.1109/EuCAP.2012.6206489<br />
[6] Ascher, C.; Zwirello, L.; Zwick, T.; Trommer, G.; „Integrity monitoring<br />
for UWB/INS tightly coupled pedestrian indoor scenarios,“ International<br />
Conference on Indoor Positioning and Indoor Navigation (IPIN),<br />
Sept. 2011, doi: 10.1109/IPIN.2011.6071948<br />
> MORE@CLICK EEK11294520<br />
2 7 0 E & E - K o m p e n d i u m 2 0 13