

antriebstechnik 10/2023
antriebstechnik 10/2023
antriebstechnik 10/2023

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
FORSCHUNG UND ENTWICKLUNG<br />
mm<br />
JJ(Θ, xx) = 1 ∑(yŷ − yy)2.<br />
mm<br />
ii=1<br />
Für dieses mehrdimensionale nichtlineare Optimierungsproblem<br />
wird der Backpropagation Algorithmus verwendet. Die Gewichte<br />
Θ werden sukzessive entsprechend ihres Einflusses auf<br />
das Fehlermaß J (Θ, x) verändert. Um Divergenzen des Algorithmus<br />
vorzubeugen ist die Lernrate h eingeführt zur Abmilderung<br />
des Gradienten:<br />
Θ ≔ Θ − ηη ∂∂∂∂<br />
∂∂Θ .<br />
Bevor die Trainingsdaten dem Netzwerk zum Training bereitgestellt<br />
werden, erfolgt eine Normalisierung dieser mit deren Mittelwert<br />
und Standardabweichung für die jeweiligen Eingangsgrößen<br />
und die Ausgangsgröße.<br />
DATENGRUNDLAGE<br />
Die Nachgiebigkeiten d (Einflusszahlen) für die Regressionsanalyse<br />
stammen aus den in BECAL integrierten Berechnungsverfahren<br />
. Für die Bereitstellung der Trainingsdaten werden diese<br />
Methoden mit den folgenden Restriktionen angewandt. Betrachtet<br />
werden nur konvexe Kontaktpartner (r 1,2<br />
> 0 mm), sowie die<br />
Materialpaarung Stahl-Stahl, mit E 1,2<br />
= 2<strong>10</strong> GPa und v 1,2<br />
= 0,3.<br />
Durch die Betrachtung nur einer Materialpaarung ändern sich<br />
der E-Modul und die Querkontaktionszahl nicht und werden somit<br />
als Eingangsgrößen für die Regressionsgröße nicht berücksichtigt.<br />
Somit erfolgt die Regression mit neun Eingangs- und einer<br />
Ausgangsgröße.<br />
Die Bestimmung der Einflusszahlen anhand der verbleibenden<br />
neun freien Parameter ist bereits sehr schnell, so dass eine<br />
Großzahl an Daten für die Regressionsanalyse erzeugt werden<br />
kann und keine Augmentation der Daten notwendig ist. Zunächst<br />
erfolgt in einer Voruntersuchung die Festlegung eines<br />
charakteristischen Parameterraums für die Eingangsgrößen.<br />
Diese Werte stammen dabei aus einem typischen Bereich an<br />
Geometrievariationen für geradverzahnte Stirnräder, welche<br />
sich bis zu einem Raddurchmesser von 1.000 mm ergeben können.<br />
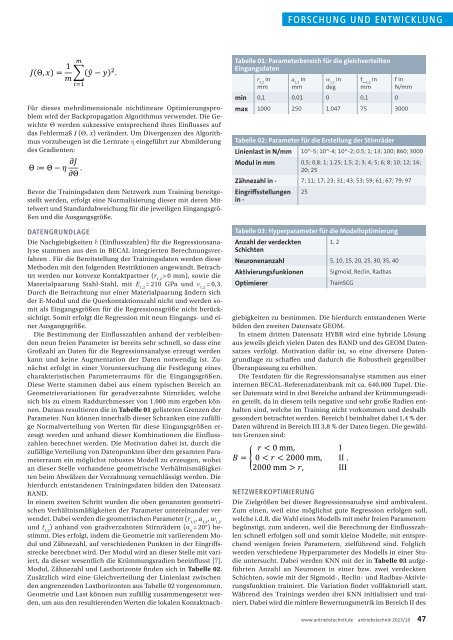
Daraus resultieren die in Tabelle 01 gelisteten Grenzen der<br />
Parameter. Nun können innerhalb dieser Schranken eine zufällige<br />
Normalverteilung von Werten für diese Eingangsgrößen erzeugt<br />
werden und anhand dieser Kombinationen die Einflusszahlen<br />
berechnet werden. Die Motivation dabei ist, durch die<br />
zufällige Verteilung von Datenpunkten über den gesamten Parameterraum<br />
ein möglichst robustes Modell zu erzeugen, wobei<br />
an dieser Stelle vorhandene geometrische Verhältnismäßigkeiten<br />
beim Abwälzen der Verzahnung vernachlässigt werden. Die<br />
hierdurch entstandenen Trainingsdaten bilden den Datensatz<br />
RAND.<br />
In einem zweiten Schritt wurden die oben genannten geometrischen<br />
Verhältnismäßigkeiten der Parameter untereinander verwendet.<br />
Dabei werden die geometrischen Parameter (r 1,2<br />
, a 1,2<br />
, w 1,2<br />
und t 1,2<br />
) anhand von gradverzahnten Stirnrädern (α n<br />
= 20°) bestimmt.<br />
Dies erfolgt, indem die Geometrie mit variierendem Modul<br />
und Zähnezahl, auf verschiedenen Punkten in der Eingriffsstrecke<br />
berechnet wird. Der Modul wird an dieser Stelle mit variiert,<br />
da dieser wesentlich die Krümmungsradien beeinflusst [7].<br />
Modul, Zähnezahl und Lasthorizonte finden sich in Tabelle 02.<br />
Zusätzlich wird eine Gleichverteilung der Linienlast zwischen<br />
den angrenzenden Lasthorizonten aus Tabelle 02 vorgenommen.<br />
Geometrie und Last können nun zufällig zusammengesetzt werden,<br />
um aus den resultierenden Werten die lokalen Kontaktnach-<br />
Tabelle 01: Parameterbereich für die gleichverteilten<br />
Eingangsdaten<br />
r 1,2<br />
in<br />
mm<br />
Tabelle 02: Parameter für die Erstellung der Stirnräder<br />
Linienlast in N/mm <strong>10</strong>^-5; <strong>10</strong>^-4; <strong>10</strong>^-2; 0.5; 1; 13; <strong>10</strong>0; 860; 3000<br />
Modul in mm 0,5; 0,8; 1; 1.25; 1.5; 2; 3; 4; 5; 6; 8; <strong>10</strong>; 12; 16;<br />
20; 25<br />
Zähnezahl in - 7; 11; 17; 23; 31; 43; 53; 59; 61; 67; 79; 97<br />
Eingriffsstellungen<br />
in -<br />
25<br />
Tabelle 03: Hyperparameter für die Modelloptimierung<br />
Anzahl der verdeckten<br />
Schichten<br />
1, 2<br />
Neuronenanzahl 5, <strong>10</strong>, 15, 20, 25, 30, 35, 40<br />
Aktivierungsfunkionen<br />
Optimierer<br />
a 1,2<br />
in<br />
mm<br />
w 1,2<br />
in<br />
deg<br />
Sigmoid, Reclin, Radbas<br />
TrainSCG<br />
t_ 1,2<br />
in<br />
mm<br />
min 0,1 0,01 0 0,1 0<br />
f in<br />
N/mm<br />
max <strong>10</strong>00 250 1.047 75 3000<br />
giebigkeiten zu bestimmen. Die hierdurch entstandenen Werte<br />
bilden den zweiten Datensatz GEOM.<br />
In einem dritten Datensatz HYBR wird eine hybride Lösung<br />
aus jeweils gleich vielen Daten des RAND und des GEOM Datensatzes<br />
verfolgt. Motivation dafür ist, so eine diversere Datengrundlage<br />
zu schaffen und dadurch die Robustheit gegenüber<br />
Überanpassung zu erhöhen.<br />
Die Testdaten für die Regressionsanalyse stammen aus einer<br />
internen BECAL-Referenzdatenbank mit ca. 640.000 Tupel. Dieser<br />
Datensatz wird in drei Bereiche anhand der Krümmungsradien<br />
geteilt, da in diesem teils negative und sehr große Radien enthalten<br />
sind, welche im Training nicht vorkommen und deshalb<br />
gesondert betrachtet werden. Bereich I beinhaltet dabei 1,4 % der<br />
Daten während in Bereich III 3,8 % der Daten liegen. Die gewählten<br />
Grenzen sind:<br />
rr < 0 mm,<br />
I<br />
BB = { 0 < rr < 2000 mm, II .<br />
2000 mm > rr, III<br />
NETZWERKOPTIMIERUNG<br />
Die Zielgrößen bei dieser Regressionsanalyse sind ambivalent.<br />
Zum einen, weil eine möglichst gute Regression erfolgen soll,<br />
welche i.d.R. die Wahl eines Modells mit mehr freien Parametern<br />
begünstigt, zum anderen, weil die Berechnung der Einflusszahlen<br />
schnell erfolgen soll und somit kleine Modelle, mit entsprechend<br />
wenigen freien Parametern, zielführend sind. Folglich<br />
werden verschiedene Hyperparameter des Modells in einer Studie<br />
untersucht. Dabei werden KNN mit der in Tabelle 03 aufgeführten<br />
Anzahl an Neuronen in einer bzw. zwei verdeckten<br />
Schichten, sowie mit der Sigmoid-, Reclin- und Radbas-Aktivierungsfunktion<br />
trainiert. Die Variation findet vollfaktoriell statt.<br />
Während des Trainings werden drei KNN initialisiert und trainiert.<br />
Dabei wird die mittlere Bewertungsmetrik im Bereich II des<br />
www.<strong>antriebstechnik</strong>.de <strong>antriebstechnik</strong> <strong>2023</strong>/<strong>10</strong> 47













