Automationspraxis 01.2024

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
_Trend des Monats<br />
Bild: Kuka Group<br />
MRK ist ein Mittelweg<br />
zwischen Vollautomation<br />
und manueller Arbeit.<br />
Damit die Vorteile<br />
von MRK umfänglich<br />
genutzt werden können,<br />
muss die bisherige Planungsmethodik<br />
von Anlagen<br />
erweitert werden.<br />
Planung von MRK-Arbeitsplätzen<br />
Bei der Planung einer Neuanlage für die MRK<br />
sind daher folgende Aspekte zu beachten:<br />
1. Zuordnung der Tätigkeit auf Mensch oder Roboter:<br />
Zunächst sind alle Tätigkeiten in einer Anlage<br />
zu analysieren. Die erste Frage ist hierbei:<br />
Welche Tätigkeit lässt sich wirtschaftlich automatisieren.<br />
Dabei helfen die vorher beschriebenen<br />
Gedanken des Nutzungsgrades der menschlichen<br />
Fähigkeiten. Im zweiten Schritt ist zu klären, welche<br />
dieser automatisierbaren Aufgaben sich für<br />
MRK eignen. So eignet sich das Schutzgasschweißen<br />
nicht für die direkte Zusammenarbeit von<br />
Mensch und Roboter, während das Verschrauben<br />
vorgesteckter Schrauben gut kombinierbar ist.<br />
2. Auslastung des Roboters: Um die Roboter in einer<br />
Anlage gut auszulasten, sollten gleiche Aufgaben<br />
in einer Station zusammengefasst werden. Im<br />
Gegensatz zum Menschen sollte ein Roboter nämlich<br />
möglichst nur einen Prozess ausführen, da ansonsten<br />
zeitaufwendige Werkzeugwechsel oder<br />
teure Multitools notwendig sind. Durch geschickte<br />
Anordnung der Roboter im Anlagenlayout<br />
kann die Auslastung des Roboters erhöht werden,<br />
indem der Roboter zwei Arbeitsplätzen zuarbeitet.<br />
Letztlich ist die Zuordnung der Aufgaben und die<br />
Anordnung im Layout ein iterativer Prozess, da<br />
am Ende alle Werker und Roboter gut ausgelastet<br />
sein sollten.<br />
3. Nachempfinden der Werker-Tätigkeit vermeiden:<br />
Die Versuchung ist groß, bei bekannten Montage-Tätigkeiten<br />
den Menschen durch den Roboter<br />
nachzuahmen. Dies führt aber selten zu einer<br />
guten Lösung. Der manuelle Arbeitsplatz ist so gestaltet<br />
worden, dass er die menschlichen Schwächen<br />
wie z.B. ungünstige Körperstellung, Ermüdung,<br />
punktförmige Krafteinleitung, etc. vermeidet.<br />
Der Roboter hat diese Schwächen nicht, dafür<br />
aber andere Defizite wie z.B. die Wahrnehmungsfähigkeit.<br />
Damit führt das Nachahmen zu Anlagenkonzepten,<br />
in denen zweimal suboptimale Lösungen<br />
gefunden werden müssen.<br />
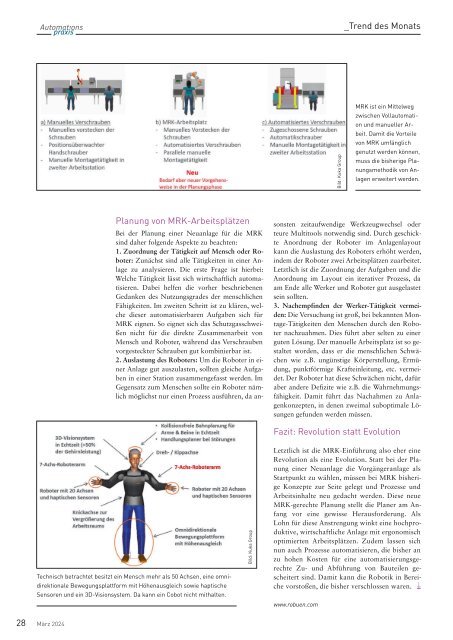
Fazit: Revolution statt Evolution<br />
Technisch betrachtet besitzt ein Mensch mehr als 50 Achsen, eine omnidirektionale<br />
Bewegungsplattform mit Höhenausgleich sowie haptische<br />
Sensoren und ein 3D-Visionsystem. Da kann ein Cobot nicht mithalten.<br />
Bild: Kuka Group<br />
Letztlich ist die MRK-Einführung also eher eine<br />
Revolution als eine Evolution. Statt bei der Planung<br />
einer Neuanlage die Vorgängeranlage als<br />
Startpunkt zu wählen, müssen bei MRK bisherige<br />
Konzepte zur Seite gelegt und Prozesse und<br />
Arbeitsinhalte neu gedacht werden. Diese neue<br />
MRK-gerechte Planung stellt die Planer am Anfang<br />
vor eine gewisse Herausforderung. Als<br />
Lohn für diese Anstrengung winkt eine hochproduktive,<br />
wirtschaftliche Anlage mit ergonomisch<br />
optimierten Arbeitsplätzen. Zudem lassen sich<br />
nun auch Prozesse automatisieren, die bisher an<br />
zu hohen Kosten für eine automatisierungsgerechte<br />
Zu- und Abführung von Bauteilen gescheitert<br />
sind. Damit kann die Robotik in Bereiche<br />
vorstoßen, die bisher verschlossen waren. ↓<br />
www.robuen.com<br />
28 März 2024