- Page 2 and 3:
Volumes II I Index and Cross Refere
- Page 4 and 5:
M01'OROLA LINEAR/INTERFACE ICs DEVI
- Page 6:
Index and Cross Reference In Brief
- Page 23 and 24:
MOTOROLA LlNEARIiNTERFACE ICs DEVIC
- Page 25 and 26:
Precision Low Voltage References A
- Page 27:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 35 and 36:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 47 and 48:
Vin = 10VIo2OV + 22oo"F TL431 , A,
- Page 49 and 50:
Data Conversion The line of data co
- Page 51 and 52:
Data Conversion Package Overview MO
- Page 54:
MAXIMUM RATINGS (TA = 25'C unless o
- Page 62 and 63:
MOTOROLA - SEMICONDUCTOR ----__ TEC
- Page 66 and 67:
The MC1408 consists of a reference
- Page 70:
Voltage outputs of a larger magnitu
- Page 75 and 76:
ABSOLUTE MAXIMUM RATINGS MC10319 Pa
- Page 77:
MC10319 TIMING CHARACTERISTICS (TA
- Page 82 and 83:
ICC(A) is nominally 17 mA, and does
- Page 84 and 85:
VIDEO APPUCATIONS The MC10319 is su
- Page 91 and 92:
APERTURE DELAY - The time differenc
- Page 94 and 95:
MC10321 ELECTRICAL CHARACTERISTICS
- Page 99 and 100:
applied to the reference must be su
- Page 101 and 102:
VIDEO APPLICATIONS The MC10321 is s
- Page 107:
Vin 0-25 MHz Clock +2.0 V 500 n (Op
- Page 111:
Symbol Pin 00-07 1-4, 21-24 DGnd 5
- Page 124:
Glitch Area - The energy content of
- Page 127 and 128:
MAXIMUM RATINGS MC10324 Characteris
- Page 136:
Digitally Modulating an Analog Sign
- Page 140:
Interface Circuits In Brief ... Des
- Page 149:
Interface Circuits Device AM26LS30
- Page 158:
Operating Temperature Range The max
- Page 161:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 165:
AM26LS32 MAXIMUM RATINGS Rating Sym
- Page 172 and 173:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 180 and 181:
MOTOROLA - SEMICONDUCTOR ----__ TEC
- Page 194:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 200:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 209:
MC3437 ELECTRICAL CHARACTERISTICS (
- Page 215:
------..., I 2 MC3447s i I I OAV 01
- Page 233:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 239 and 240:
MAXIMUM RATINGS (TA = 25°C) MC3469
- Page 242:
MC3469 AC SWITCHING CHARACTERISTICS
- Page 249:
MAXIMUM RATINGS (TA=25°C) MC3470,
- Page 262 and 263:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 266:
MC3471 AC SWITCHING CHARACTERISTICS
- Page 278 and 279:
MOTOROLA - SEMICONDUCTOR - ____ _ T
- Page 282:
MAXIMUM RATINGS MC3487 Roting Symbo
- Page 291:
OPERATING DYNAMIC POWER SUPPLY CURR
- Page 301 and 302:
MAXIMUM RATINGS MC34050, MC34051 Pa
- Page 306:
MC34050, MC34051 FIGURE 16 - EIA·4
- Page 318:
MC75S110 ELECTRICAL CHARACTERISTICS
- Page 323 and 324:
MC751728, MC751748 ELECTRICAL CHARA
- Page 329 and 330:
used) and at what current levels th
- Page 331:
MC75172B, MC75174B Comparing System
- Page 342 and 343:
ULN2801, ULN2802, ULN2803, ULN2804
- Page 346:
Communication Circuits In Brief ...
- Page 352 and 353:
Subscriber Loop Interface Circuits
- Page 354:
PCM Mono-Circuits Codec-Filters MC1
- Page 357:
ISDN Voice/Data Circuits Integrated
- Page 360:
Voice/Data Communication (Digital T
- Page 368 and 369:
Telephone Accessory Circuits (conti
- Page 372:
Summary of Bipolar Telecom Circuits
- Page 375 and 376:
RF Communications Device MC1496, MC
- Page 388:
MAXIMUM RATINGS MC2830 Rating Symbo
- Page 395:
MAXIMUM RATINGS MC2833 Ratings Symb
- Page 398:
MC2833 FIGURE 9 - 144 MHzlX12 MULTI
- Page 403:
CIRCUIT DESCRIPTION The MC3335 is a
- Page 412:
CIRCUIT DESCRIPTION The MC3357 is a
- Page 421:
MAXIMUM RATINGS (TA = 25°C unless
- Page 426:
VCC = 4.0 V 1st IF 10.7 MHz from In
- Page 434:
MOTOROLA - SEMICONDUCTOR ----- TE
- Page 450 and 451:
Data Buffer Design The data buffer
- Page 454:
VCC = 4.0 Vdc Cl o.ot MC3371, MC337
- Page 469:
MAXIMUM RATINGS MC13055 Rating Symb
- Page 474:
The MC13055 is an extended frequenc
- Page 477:
MAXIMUM RATINGS MC13135, MC13136 Ra
- Page 494 and 495:
S-Parameters (VEE =-5.0 Vdc, TA = 2
- Page 496:
MC13155 S-Parameters (VEE = - 3.0 V
- Page 503 and 504:
MOTOROLA SEMICONDUCTOR ____ _ TECHN
- Page 508:
Pin Symbol 9 Xtalb 10 Reg. Gnd 11 E
- Page 520 and 521:
MC13175, MC13176 Figure 26. Circuit
- Page 522 and 523:
MOTOROLA SEMICONDUCTOR---- TECHNI
- Page 524 and 525:
Addendum An Introduction to Motorol
- Page 526 and 527:
COMMUNICATIONS SYSTEMS For the most
- Page 528 and 529:
In addition, there are many PC and
- Page 530 and 531:
Consumer Electronic Circuits In Bri
- Page 532 and 533:
Video Circuits Video Circuits Encod
- Page 535:
Video Circuits (continued) Bringing
- Page 540 and 541:
Video Circuits (continued) TV Stere
- Page 542:
Video Circuits (continued) Subcarri
- Page 545 and 546:
Video Circuits (continued) Multista
- Page 548 and 549:
Video Circuits (continued) PLL Tuni
- Page 550:
Video Circuits (continued) Advanced
- Page 556 and 557:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 558:
CA3146 ELECTRICAL CHARACTERICISTICS
- Page 570:
MAXIMUM RATINGS (TA = +25°C, unles
- Page 581:
AM Section The AM modulator transfe
- Page 588:
MC1377 ELECTRICAL CHARACTERICISTICS
- Page 603:
MAXIMUM RATINGS MC1378 Rating Symbo
- Page 609:
MC1388 ELECTRICAL CHARACTERISTICS (
- Page 622:
+2.0 V + Sine V Pin 28 -2.0 V +2.0V
- Page 629:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 635:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 653:
In the PLL filter circuit on Pin 19
- Page 660:
MAXIMUM RATINGS MC13024 Rating Symb
- Page 671:
MAXIMUM RAnNGS MC13077 Rating Symbo
- Page 692 and 693: Figure 1 shows a simplified block d
- Page 694: 12C Bus It is not within the scope
- Page 697: In addition, components are added t
- Page 700: up/down counter and decoder.The cou
- Page 704: B-Y and R-Y Inputs (Pin 26, 27) - C
- Page 707 and 708: MC44001 Table 2. Control Bit Truth
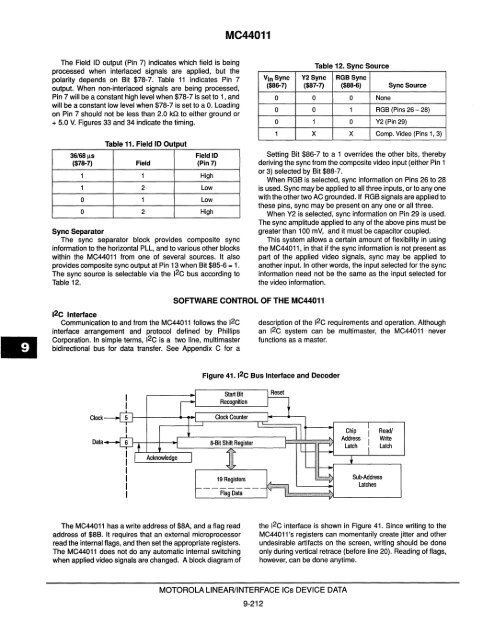
- Page 709 and 710: When the Address Read/Write bit is
- Page 714 and 715: MAXIMUM RATINGS MC44011 Parameter S
- Page 716: MC44011 ELECTRICAL CHARACTERISTICS
- Page 734: Introduction The MC44011, a member
- Page 742 and 743: Write to Control Registers Writing
- Page 745: Reading Flags A read cycle need not
- Page 749: MC44011 Table 19. Recommended Initi
- Page 758: Aspect Ratio - The ratio of the wid
- Page 764: Composite Sync Separator The compos
- Page 773 and 774: VIF--+---t osc AFT The AFT portion
- Page 775 and 776: Alignment The alignment of the MC44
- Page 779: 24 Pin (DIP) 14 15 16 17 28 Pin (SO
- Page 783 and 784: Winding Instructions Use 38 AWG ena
- Page 785: Modes PAL - In the PAL mode the AGC
- Page 789:
MAXIMUM RATINGS MC44615A Rating Sym
- Page 796:
Symbol Pin iHset Hadvout Hadv in 5
- Page 806:
MC44802A FIGURE 1a - RIPPLE REJECTI
- Page 810:
TABLE 3 Input Data Output State R2
- Page 815 and 816:
J I Buffers MC44807/17 BUS TIMING D
- Page 818:
MOTOROLA SEMICONOUCTOR----- TECHN
- Page 824 and 825:
Basic Function The D/A section has
- Page 826 and 827:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 829 and 830:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 834:
By referring to Figures 6 and 7 it
- Page 837:
Color Difference Matrixing, Color K
- Page 843 and 844:
MOTOROLA LINEAR/INTERFACE ICs DEVIC
- Page 846:
Special Functions Function Low Side
- Page 849 and 850:
Alternator Voltage Regulator MC3309
- Page 851 and 852:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 855:
MC3334P, MCC3334, MCCF3334 ELECTRIC
- Page 864:
Introduction The MC3391 is a low si
- Page 877 and 878:
MC3399 ELECTRICAL CHARACTERICISTICS
- Page 894 and 895:
3. Oetermine the maximum steady sta
- Page 896 and 897:
Figure 27. Slow Down FET Turn-On Fi
- Page 898:
MAXIMUM RATINGS MC33092 Rating Symb
- Page 903 and 904:
Introduction The MC33092, designed
- Page 905:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 913:
The TIIW layer provides excellent i
- Page 918:
MOTOROLA SEMICONDUCTOR----- TECHN
- Page 926:
MC33298 DYNAMIC ELECTRICAL CHARACTE
- Page 939 and 940:
MC33298 Table 1. Program to Exercis
- Page 946:
The use of Cin is not mandatory, an
- Page 950 and 951:
Other Linear Circuits In Brief ...
- Page 952 and 953:
Smoke Detectors (CMOS) These smoke
- Page 955:
II MAXIMUM RATINGS (TA = +25°C, un
- Page 974:
TOTAL DC ACCURACY - The total DC ac
- Page 998:
Surface Mount Technology In Brief .
- Page 1001:
MC13024DW MC13055D MC13060D MC33023
- Page 1004 and 1005:
Remote Control Functions MC14469FN
- Page 1006 and 1007:
Analog MPQ Table Tape/Reel and Ammo
- Page 1009 and 1010:
MOTOROLA LINEAR/INTERFACE ICs DEVIC
- Page 1028 and 1029:
Quality and Reliability Assurance I
- Page 1031:
Figure 4. Portion of a Process Flow
- Page 1036 and 1037:
humidity independently of each othe
- Page 1038 and 1039:
Applications and Product Literature
- Page 1040 and 1041:
Applications and Product Literature
- Page 1042 and 1043:
Applications and Product Literature
- Page 1044 and 1045:
Applications and Product literature