Edge-connectivity of undirected and directed hypergraphs
Edge-connectivity of undirected and directed hypergraphs
Edge-connectivity of undirected and directed hypergraphs

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Section 6.4. Directed network design problems with orientation constraints 105<br />
v1 a1<br />
v2 v3<br />
v1 v2 v3 v4 v5 v6<br />
v4<br />
e1<br />
a2<br />
v5<br />
e2<br />
v6<br />
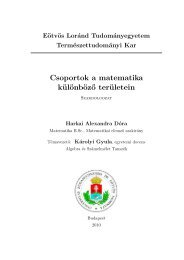
Figure 6.2: Transformation into a submodular flow problem in Theorem 6.13<br />
correspond to the hyperedges <strong>and</strong> hyperarcs in E ∪ A; we denote a node corresponding to<br />
a hyperedge or hyperarc e by ue. The edge set B contains an edge from the head <strong>of</strong> e to ue<br />
(with edge cost equal to the cost <strong>of</strong> e) if e is a hyperarc; if e is a hyperedge, then B contains<br />
edges from every node <strong>of</strong> e to ue (each with cost equal to the cost <strong>of</strong> the corresponding<br />
orientation <strong>of</strong> e). A set function q is defined on the ground set U ∪ V as follows:<br />
⎧<br />
⎪⎨ p(X ∩ V ) if ue ∈ X implies that the nodes <strong>of</strong> e are in X,<br />
q(X) := −1<br />
⎪⎩<br />
−∞<br />
if X = {ue} for some e ∈ E,<br />
otherwise.<br />
Figure 6.2 shows this construction. Let f ≡ 0 be the lower capacity <strong>of</strong> the edges <strong>and</strong><br />
g ≡ 1 the upper capacity. It is easy to see that if p is intersecting supermodular, then q is<br />
crossing supermodular. So Theorem 2.28 implies that the problem <strong>of</strong> finding a minimum<br />
ua1<br />
cost <strong>directed</strong> subgraph D ′ = (U, V ; B ′ ) <strong>of</strong> D that satisfies<br />
δD ′(X) − ϱD ′(X) ≥ q(X) for every X ⊆ U ∪ V (6.6)<br />
can be solved in polynomial time (note that this is a one-way submodular flow system).<br />
Since q({ue}) = −1 if e ∈ E, ue is the head <strong>of</strong> at most one edge <strong>of</strong> D ′ . Thus the subgraph<br />
D ′ corresponds to an oriented sub-hypergraph M ′ <strong>of</strong> M. It is easy to check that M ′ covers<br />
the requirement function p if <strong>and</strong> only if D ′ satisfies (6.6).<br />
6.4.2 TDI property<br />
The above construction shows that when the requirement function is intersecting supermod-<br />
ular, the <strong>directed</strong> network design problem with orientation constraints can be transformed<br />
into a submodular flow problem which is TDI. We now prove that the linear system that<br />
we naturally associate to the original problem is also TDI, even for positively intersecting<br />
supermodular requirement functions. To formulate the appropriate linear program, the<br />
hypergraph analogue <strong>of</strong> orientation constraints must be defined. The elements <strong>of</strong> a set A ′<br />
ua2<br />
ue1<br />
ue2<br />
V<br />
U