Edge-connectivity of undirected and directed hypergraphs
Edge-connectivity of undirected and directed hypergraphs
Edge-connectivity of undirected and directed hypergraphs

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
98 Chapter 6. Hypergraph orientation<br />
x1<br />
x1<br />
zc1<br />
sc1<br />
tc1<br />
wc1<br />
xi1<br />
xi1<br />
zci<br />
xi2<br />
xi2<br />
sci<br />
tci<br />
xi3<br />
xi3<br />
zck<br />
xl<br />
xl<br />
tck<br />
wci sck wck<br />
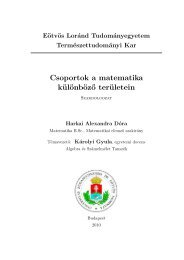
Figure 6.1: Reduction <strong>of</strong> 3-SAT to local edge-<strong>connectivity</strong> orientation. The figure shows<br />
the construction for the clause ci = (xi1, xi2, xi3). An orientation <strong>of</strong> the edges <strong>of</strong> type xx<br />
corresponds to an evaluation; the orientation <strong>of</strong> the other edges is uniquely determined.<br />
vyzc. Consider the problem <strong>of</strong> finding an orientation <strong>of</strong> G such that for every clause c ∈ C<br />
there are at least 3 edge-disjoint paths from sc to wc, 3 edge-disjoint paths from zc to tc,<br />
<strong>and</strong> 1 path from sc to tc. It is easy to see that the existence <strong>of</strong> such an orientation is<br />
equivalent to the satisfiability <strong>of</strong> C.<br />
6.2.2 Orientations <strong>and</strong> submodular flows<br />
The orientation problems described above can be studied for mixed graphs (graphs with<br />
both <strong>un<strong>directed</strong></strong> <strong>and</strong> <strong>directed</strong> edges) as well. An orientation <strong>of</strong> a mixed graph is obtained by<br />
orienting its <strong>un<strong>directed</strong></strong> edges. In [25] Frank solved the problem <strong>of</strong> finding an orientation <strong>of</strong><br />
a mixed graph that covers a given crossing supermodular set function which does not have<br />
to be non-negative. He showed that this is equivalent to a submodular flow problem, <strong>and</strong><br />
as a result minimum cost orientation (when the two possible orientations <strong>of</strong> an <strong>un<strong>directed</strong></strong><br />
edge have different costs) can be solved in polynomial time. The characterization here is<br />
considerably more complicated then in Theorem 6.3:<br />
Theorem 6.5 (Frank [25]). Let G = (V ; E, A) be a mixed graph, where E is the set <strong>of</strong><br />
<strong>un<strong>directed</strong></strong> edges, <strong>and</strong> A is the set <strong>of</strong> <strong>directed</strong> edges. Let p : 2 V → Z ∪ {−∞} be a crossing<br />
supermodular set function. Then G has an orientation covering p if <strong>and</strong> only if<br />
<br />
(p(Z) − ϱA(Z)) ≤ eE(F)<br />
Z∈F<br />
holds whenever F is a tree-composition <strong>of</strong> some X ⊆ V .<br />
The reason that tree-compositions come into the picture is the connection with submod-<br />
ular flows: in Theorem 2.28 we saw that the condition on the feasibility <strong>of</strong> a submodular<br />
sci<br />
tci