Institute for Sanitary Engineering, Water Quality and Solid Waste ...
Institute for Sanitary Engineering, Water Quality and Solid Waste ...
Institute for Sanitary Engineering, Water Quality and Solid Waste ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Institute</strong> <strong>for</strong> <strong>Sanitary</strong> <strong>Engineering</strong>, <strong>Water</strong> <strong>Quality</strong> <strong>and</strong> <strong>Solid</strong> <strong>Waste</strong> Management<br />
Dissertations<br />
Systematic design <strong>and</strong> process optimisation of<br />
a robot <strong>for</strong> treatment of biomass in solar dryers<br />
Innovation stress <strong>and</strong> short product life cycles in the<br />
industrial sector of biomass processing ask <strong>for</strong> clear<br />
methodical procedures during the design process. Currently,<br />
there is a lack of systematic approaches to the<br />
development process of technical systems in this sector.<br />
There<strong>for</strong>e, in this work the design method proposed<br />
by The Association of German Engineers (VDI) was<br />
tested <strong>and</strong> adapted to the context of biomass process<br />
engineering. The development of a mixing <strong>and</strong> transporting<br />
robot <strong>for</strong> solar biomass dryers exemplifies the<br />
potential of that systematic <strong>and</strong> scientific approach.<br />
First, the requirements on the robot were determined<br />
to set up in ‘requirements lists’. A ‘conflict matrix’<br />
supported identification <strong>and</strong> elimination of conflicts<br />
of aims. The requirements on the functions of the robot<br />
were abstracted <strong>and</strong> arranged in several ‘function<br />
structure plans’. For each function, various potential<br />
‘working principles’ were identified <strong>and</strong> organised in<br />
several ‘morphological matrices’. In order to select exclusive<br />
reliable <strong>and</strong> cost-efficient components each of<br />
the 155 identified working principles was benchmarked<br />
in a ‘pre-evaluation matrix’. The best-marked components<br />
were chosen <strong>and</strong> combined to two promising preliminary<br />
concepts <strong>for</strong> the robot.<br />
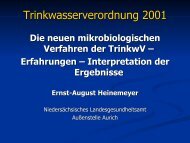
Prototype of the biomass processing robot during a<br />
field test<br />
Next, the modules of the robot were refined <strong>and</strong> worked<br />
out to two preliminary embodiment designs, solution<br />
(1) <strong>and</strong> (2). Be<strong>for</strong>e releasing <strong>for</strong> production,<br />
both designs were technically <strong>and</strong> economically evaluated.<br />
As result, the economically <strong>and</strong> technically<br />
weak points were identified. The product strength s of<br />
the solutions <strong>for</strong> the robot was computed as s 1<br />
=0.79<br />
<strong>and</strong> s 2<br />
=0.70. Solution (1) was there<strong>for</strong>e selected <strong>for</strong><br />
being designed in detail. For detail design phase, an<br />
approach is presented to combine novel Digital Mock-<br />
Up (DMU) techniques with the VDI design method.<br />
As result, especially FEM structure analysis, collision<br />
<strong>and</strong> assembly analyses were integrated into the VDI<br />
procedure. Prior to building the first physical prototype<br />
design problems were identified <strong>and</strong> solved on<br />
the digital prototype ranging from geometrical errors<br />
to impossible assembly sequences. In addition, this<br />
work shows a strategy <strong>for</strong> Product Data Management<br />
(DMU). Data in<strong>for</strong>mation loss was there<strong>for</strong>e reduced<br />
<strong>and</strong> data safety was increased since the suppliers got<br />
exclusively the manufacturing in<strong>for</strong>mation they needed<br />
actually. Finally, a physical prototype was manufactured<br />
<strong>and</strong> tested be<strong>for</strong>e market release. For this testing<br />
phase, an optimisation approach was integrated<br />
into the VDI design process. That approach was exemplified<br />
by optimising the mixing <strong>and</strong> transporting module<br />
of the biomass processing robot. During testing<br />
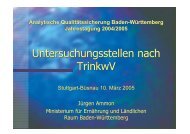
Optimised biomass processing robot after release <strong>for</strong><br />
serial production in a solar dryer <strong>for</strong> sewage sludge<br />
near Vienna, Austria<br />
Digital analyse of human/machine interaction during<br />
opening the hinged moror cap of the biomass processing<br />
robot<br />
64