

pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
5.3 Off-line Inference by Experts<br />
Diagnosing the Beam Propeller Movement<br />
of the Frontal St<strong>and</strong><br />
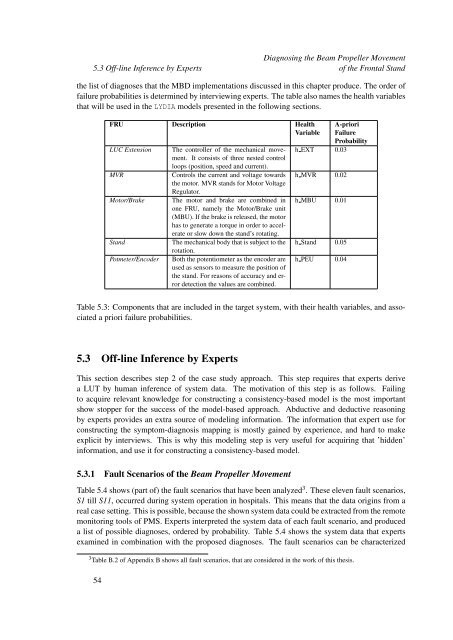
the list of diagnoses that the MBD implementations discussed in this chapter produce. The order of<br />
failure probabilities is determined by interviewing experts. The table also names the health variables<br />
that will be used in the LYDIA models presented in the following sections.<br />
FRU Description Health<br />
Variable<br />
LUC Extension<br />
MVR<br />
Motor/Brake<br />
St<strong>and</strong><br />
Potmeter/Encoder<br />
The controller of the mechanical movement.<br />
It consists of three nested control<br />
loops (position, speed <strong>and</strong> current).<br />
Controls the current <strong>and</strong> voltage towards<br />
the motor. MVR st<strong>and</strong>s for Motor Voltage<br />
Regulator.<br />
The motor <strong>and</strong> brake are combined in<br />
one FRU, namely the Motor/Brake unit<br />
(MBU). If the brake is released, the motor<br />
has to generate a torque in order to accelerate<br />
or slow down the st<strong>and</strong>’s rotating.<br />
The mechanical body that is subject to the<br />
rotation.<br />
Both the potentiometer as the encoder are<br />
used as sensors to measure the position of<br />
the st<strong>and</strong>. For reasons of accuracy <strong>and</strong> error<br />
detection the values are combined.<br />
h EXT 0.03<br />
h MVR 0.02<br />
h MBU 0.01<br />
h St<strong>and</strong> 0.05<br />
h PEU 0.04<br />
A-priori<br />
Failure<br />
Probability<br />
Table 5.3: Components that are included in the target system, with their health variables, <strong>and</strong> associated<br />
a priori failure probabilities.<br />
5.3 Off-line Inference by Experts<br />
This section describes step 2 of the case study approach. This step requires that experts derive<br />
a LUT by human inference of system data. The motivation of this step is as follows. Failing<br />
to acquire relevant knowledge for constructing a consistency-based model is the most important<br />
show stopper for the success of the model-based approach. Abductive <strong>and</strong> deductive reasoning<br />
by experts provides an extra source of modeling information. The information that expert use for<br />
constructing the symptom-diagnosis mapping is mostly gained by experience, <strong>and</strong> hard to make<br />
explicit by interviews. This is why this modeling step is very useful for acquiring that ’hidden’<br />
information, <strong>and</strong> use it for constructing a consistency-based model.<br />
5.3.1 Fault Scenarios of the Beam Propeller Movement<br />
Table 5.4 shows (part of) the fault scenarios that have been analyzed 3 . These eleven fault scenarios,<br />
S1 till S11, occurred during system operation in hospitals. This means that the data origins from a<br />
real case setting. This is possible, because the shown system data could be extracted from the remote<br />
monitoring tools of PMS. Experts interpreted the system data of each fault scenario, <strong>and</strong> produced<br />
a list of possible diagnoses, ordered by probability. Table 5.4 shows the system data that experts<br />
examined in combination with the proposed diagnoses. The fault scenarios can be characterized<br />
3 Table B.2 of Appendix B shows all fault scenarios, that are considered in the work of this thesis.<br />
54













