

pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Diagnosing the Beam Propeller Movement<br />
of the Frontal St<strong>and</strong> 5.4 MBD Implementation 1<br />
correctly, is at its setpoint <strong>and</strong> the system’s (C1, S1, S2) behavior is conform the prediction. The<br />
Lydia code is now:<br />
( h_c2 <strong>and</strong> h_c1 <strong>and</strong> h_s1 <strong>and</strong> h_s2 ) => (Q = P);<br />
In the same way Figure 5.4(c) shows how a third control loop can be nested over the other two.<br />
The reader is encouraged to see how the three control loops concept has been embedded in Figure<br />
5.3. Again, a correct functioning controller (C3) <strong>and</strong> system (C2, C1, S1, S2 <strong>and</strong> S3) implicate that<br />
the actual value Y equals the setpoint value X. This can be described by the following Lydia code:<br />
( h_c3 <strong>and</strong> h_c2 <strong>and</strong> h_c1 <strong>and</strong> h_s1 <strong>and</strong> h_s2 <strong>and</strong> h_s3 ) => (Y = X);<br />
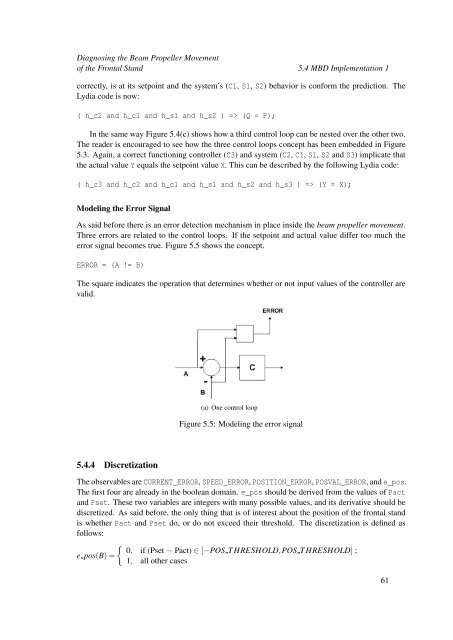
Modeling the Error Signal<br />
As said before there is an error detection mechanism in place inside the beam propeller movement.<br />
Three errors are related to the control loops. If the setpoint <strong>and</strong> actual value differ too much the<br />
error signal becomes true. Figure 5.5 shows the concept.<br />
ERROR = (A != B)<br />
The square indicates the operation that determines whether or not input values of the controller are<br />
valid.<br />
(a) One control loop<br />
Figure 5.5: Modeling the error signal<br />
5.4.4 Discretization<br />
The observables are CURRENT_ERROR, SPEED_ERROR, POSITION_ERROR, POSVAL_ERROR, <strong>and</strong> e_pos.<br />
The first four are already in the boolean domain. e_pos should be derived from the values of Pact<br />
<strong>and</strong> Pset. These two variables are integers with many possible values, <strong>and</strong> its derivative should be<br />
discretized. As said before, the only thing that is of interest about the position of the frontal st<strong>and</strong><br />
is whether Pact <strong>and</strong> Pset do, or do not exceed their threshold. The discretization is defined as<br />
follows:<br />
{ 0, if (Pset − Pact) ∈ [−POS T HRESHOLD,POS T HRESHOLD] ;<br />
e pos(B) =<br />
1, all other cases<br />
61













