

pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft
pdf download - Software and Computer Technology - TU Delft

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
5.4 MBD Implementation 1<br />
Diagnosing the Beam Propeller Movement<br />
of the Frontal St<strong>and</strong><br />
(a) One control loop<br />
(b) Two nested control loops<br />
(c) Three nested control loops<br />
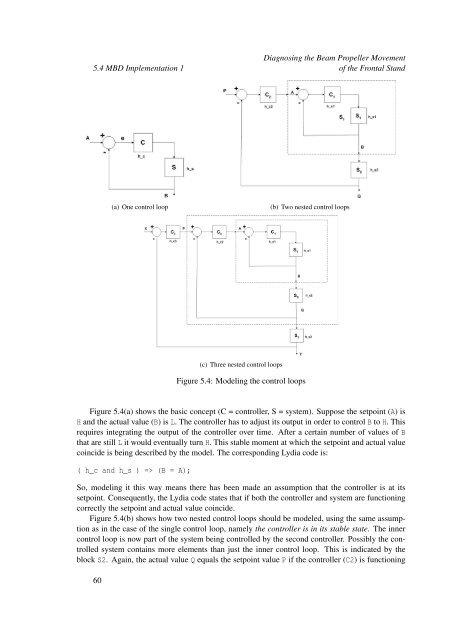
Figure 5.4: Modeling the control loops<br />
Figure 5.4(a) shows the basic concept (C = controller, S = system). Suppose the setpoint (A) is<br />
H <strong>and</strong> the actual value (B) is L. The controller has to adjust its output in order to control B to H. This<br />
requires integrating the output of the controller over time. After a certain number of values of B<br />
that are still L it would eventually turn H. This stable moment at which the setpoint <strong>and</strong> actual value<br />
coincide is being described by the model. The corresponding Lydia code is:<br />
( h_c <strong>and</strong> h_s ) => (B = A);<br />
So, modeling it this way means there has been made an assumption that the controller is at its<br />
setpoint. Consequently, the Lydia code states that if both the controller <strong>and</strong> system are functioning<br />
correctly the setpoint <strong>and</strong> actual value coincide.<br />
Figure 5.4(b) shows how two nested control loops should be modeled, using the same assumption<br />
as in the case of the single control loop, namely the controller is in its stable state. The inner<br />
control loop is now part of the system being controlled by the second controller. Possibly the controlled<br />
system contains more elements than just the inner control loop. This is indicated by the<br />
block S2. Again, the actual value Q equals the setpoint value P if the controller (C2) is functioning<br />
60













