Altivar 31 - Square D
Altivar 31 - Square D
Altivar 31 - Square D

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
DynBrake.tif<br />
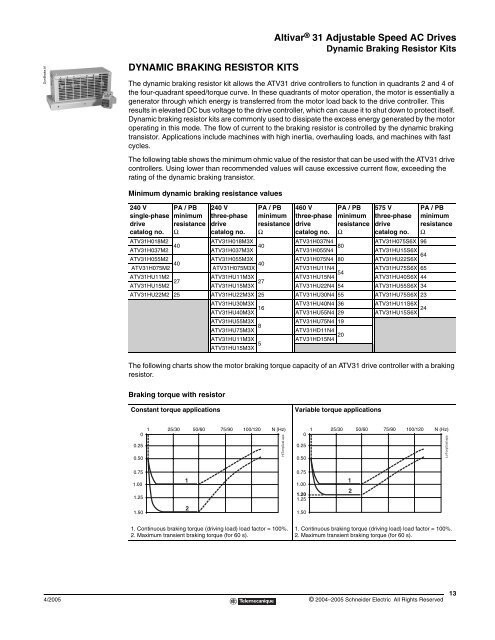
DYNAMIC BRAKING RESISTOR KITS<br />
<strong>Altivar</strong> ® <strong>31</strong> Adjustable Speed AC Drives<br />
Dynamic Braking Resistor Kits<br />
The dynamic braking resistor kit allows the ATV<strong>31</strong> drive controllers to function in quadrants 2 and 4 of<br />
the four-quadrant speed/torque curve. In these quadrants of motor operation, the motor is essentially a<br />
generator through which energy is transferred from the motor load back to the drive controller. This<br />
results in elevated DC bus voltage to the drive controller, which can cause it to shut down to protect itself.<br />
Dynamic braking resistor kits are commonly used to dissipate the excess energy generated by the motor<br />
operating in this mode. The flow of current to the braking resistor is controlled by the dynamic braking<br />
transistor. Applications include machines with high inertia, overhauling loads, and machines with fast<br />
cycles.<br />
The following table shows the minimum ohmic value of the resistor that can be used with the ATV<strong>31</strong> drive<br />
controllers. Using lower than recommended values will cause excessive current flow, exceeding the<br />
rating of the dynamic braking transistor.<br />
Minimum dynamic braking resistance values<br />
240 V<br />
single-phase<br />
drive<br />
catalog no.<br />
PA / PB<br />
minimum<br />
resistance<br />
Ω<br />
240 V<br />
three-phase<br />
drive<br />
catalog no.<br />
PA / PB<br />
minimum<br />
resistance<br />
Ω<br />
460 V<br />
three-phase<br />
drive<br />
catalog no.<br />
PA / PB<br />
minimum<br />
resistance<br />
Ω<br />
575 V<br />
three-phase<br />
drive<br />
catalog no.<br />
ATV<strong>31</strong>H018M2<br />
ATV<strong>31</strong>H037M2<br />
ATV<strong>31</strong>H055M2<br />
ATV<strong>31</strong>H075M2<br />
ATV<strong>31</strong>HU11M2<br />
ATV<strong>31</strong>HU15M2<br />
40<br />
40<br />
27<br />
ATV<strong>31</strong>H018M3X<br />
40<br />
ATV<strong>31</strong>H037M3X<br />
ATV<strong>31</strong>H055M3X<br />
40<br />
ATV<strong>31</strong>H075M3X<br />
ATV<strong>31</strong>HU11M3X<br />
27<br />
ATV<strong>31</strong>HU15M3X<br />
ATV<strong>31</strong>H037N4<br />
80<br />
ATV<strong>31</strong>H055N4<br />
ATV<strong>31</strong>H075N4 80<br />
ATV<strong>31</strong>HU11N4<br />
54<br />
ATV<strong>31</strong>HU15N4<br />
ATV<strong>31</strong>HU22N4 54<br />
ATV<strong>31</strong>H075S6X 96<br />
ATV<strong>31</strong>HU15S6X<br />
64<br />
ATV<strong>31</strong>HU22S6X<br />
ATV<strong>31</strong>HU75S6X 65<br />
ATV<strong>31</strong>HU40S6X 44<br />
ATV<strong>31</strong>HU55S6X 34<br />
ATV<strong>31</strong>HU22M2 25 ATV<strong>31</strong>HU22M3X 25 ATV<strong>31</strong>HU30N4 55 ATV<strong>31</strong>HU75S6X 23<br />
ATV<strong>31</strong>HU30M3X<br />
16<br />
ATV<strong>31</strong>HU40M3X<br />
ATV<strong>31</strong>HU40N4 36<br />
ATV<strong>31</strong>HU55N4 29<br />
ATV<strong>31</strong>HU11S6X<br />
24<br />
ATV<strong>31</strong>HU15S6X<br />
ATV<strong>31</strong>HU55M3X<br />
8<br />
ATV<strong>31</strong>HU75M3X<br />
ATV<strong>31</strong>HU11M3X<br />
5<br />
ATV<strong>31</strong>HU15M3X<br />
ATV<strong>31</strong>HU75N4 19<br />
ATV<strong>31</strong>HD11N4<br />
20<br />
ATV<strong>31</strong>HD15N4<br />
PA / PB<br />
minimum<br />
resistance<br />
Ω<br />
The following charts show the motor braking torque capacity of an ATV<strong>31</strong> drive controller with a braking<br />
resistor.<br />
Braking torque with resistor<br />
Constant torque applications Variable torque applications<br />
0<br />
0.25<br />
0.50<br />
0.75<br />
1.00<br />
1.25<br />
1.50<br />
1<br />
25/30 50/60 75/90 100/120<br />
1<br />
2<br />
1. Continuous braking torque (driving load) load factor = 100%.<br />
2. Maximum transient braking torque (for 60 s).<br />
1. Continuous braking torque (driving load) load factor = 100%.<br />
2. Maximum transient braking torque (for 60 s).<br />
4/2005 © 2004–2005 Schneider Electric All Rights Reserved<br />
N (Hz)<br />
HiTorqGraf.eps<br />
0<br />
0.25<br />
0.50<br />
0.75<br />
1.00<br />
1.20<br />
1.25<br />
1.50<br />
1<br />
25/30 50/60 75/90 100/120<br />
1<br />
2<br />
N (Hz)<br />
LoTorqGraf.eps<br />
13