

KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
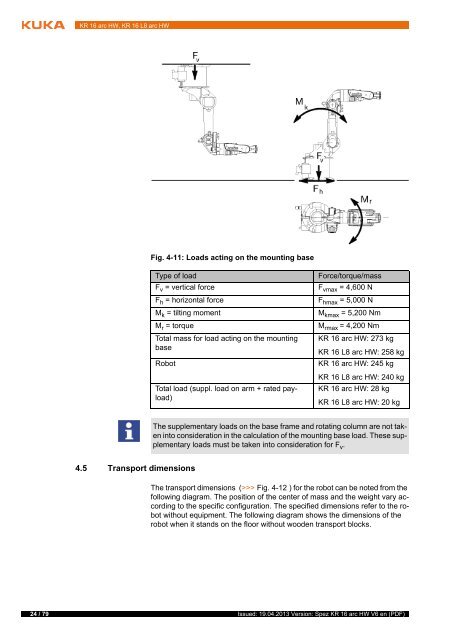
<strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong>, <strong>KR</strong> <strong>16</strong> <strong>L8</strong> <strong>arc</strong> <strong>HW</strong>Fig. 4-11: Loads acting on the mounting baseType of loadF v = vertical forceF h = horizontal forceM k = tilting momentM r = torqueTotal mass for load acting on the mountingbaseRobotTotal load (suppl. load on arm + rated payload)Force/torque/massF vmax = 4,600 NF hmax = 5,000 NM kmax = 5,200 NmM rmax = 4,200 Nm<strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong>: 273 kg<strong>KR</strong> <strong>16</strong> <strong>L8</strong> <strong>arc</strong> <strong>HW</strong>: 258 kg<strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong>: 245 kg<strong>KR</strong> <strong>16</strong> <strong>L8</strong> <strong>arc</strong> <strong>HW</strong>: 240 kg<strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong>: 28 kg<strong>KR</strong> <strong>16</strong> <strong>L8</strong> <strong>arc</strong> <strong>HW</strong>: 20 kgThe supplementary loads on the base frame and rotating column are not takeninto consideration in the calculation of the mounting base load. These supplementaryloads must be taken into consideration for F v .4.5 Transport dimensionsThe transport dimensions (>>> Fig. 4-12 ) for the robot can be noted from thefollowing diagram. The position of the center of mass and the weight vary accordingto the specific configuration. The specified dimensions refer to the robotwithout equipment. The following diagram shows the dimensions of therobot when it stands on the floor without wooden transport blocks.24 / 79 Issued: 19.04.2013 Version: Spez <strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong> V6 en (PDF)













