

KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
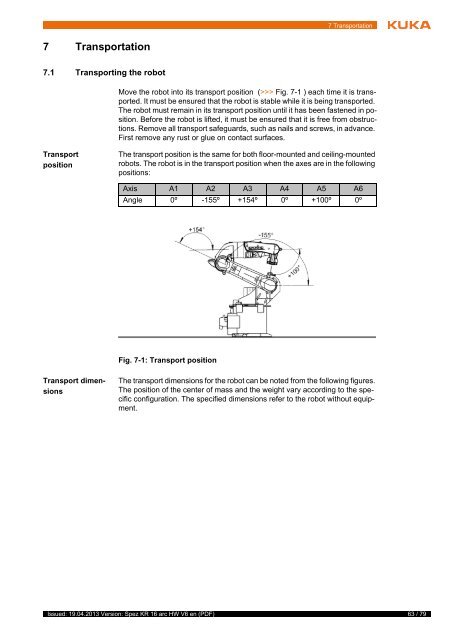
7 Transportation7 Transportation7.1 Transporting the robotMove the robot into its transport position (>>> Fig. 7-1 ) each time it is transported.It must be ensured that the robot is stable while it is being transported.The robot must remain in its transport position until it has been fastened in position.Before the robot is lifted, it must be ensured that it is free from obstructions.Remove all transport safeguards, such as nails and screws, in advance.First remove any rust or glue on contact surfaces.TransportpositionThe transport position is the same for both floor-mounted and ceiling-mountedrobots. The robot is in the transport position when the axes are in the followingpositions:Axis A1 A2 A3 A4 A5 A6Angle 0º -155º +154º 0º +100º 0ºFig. 7-1: Transport positionTransport dimensionsThe transport dimensions for the robot can be noted from the following figures.The position of the center of mass and the weight vary according to the specificconfiguration. The specified dimensions refer to the robot without equipment.Issued: 19.04.2013 Version: Spez <strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong> V6 en (PDF)63 / 79













