

KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics
KR 16 arc HW, KR 16 L8 arc HW - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
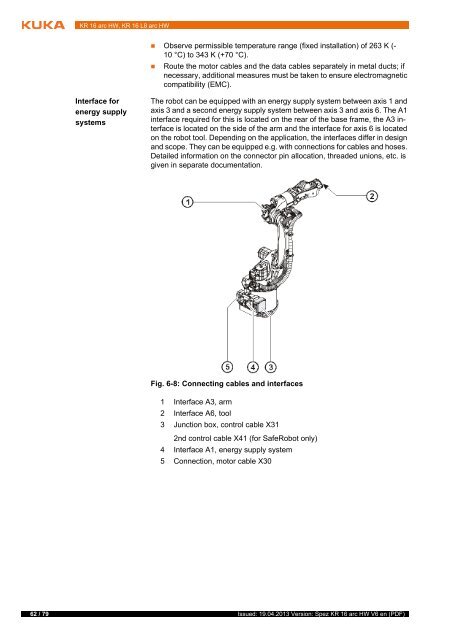
<strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong>, <strong>KR</strong> <strong>16</strong> <strong>L8</strong> <strong>arc</strong> <strong>HW</strong>• Observe permissible temperature range (fixed installation) of 263 K (-10 °C) to 343 K (+70 °C).• Route the motor cables and the data cables separately in metal ducts; ifnecessary, additional measures must be taken to ensure electromagneticcompatibility (EMC).Interface forenergy supplysystemsThe robot can be equipped with an energy supply system between axis 1 andaxis 3 and a second energy supply system between axis 3 and axis 6. The A1interface required for this is located on the rear of the base frame, the A3 interfaceis located on the side of the arm and the interface for axis 6 is locatedon the robot tool. Depending on the application, the interfaces differ in designand scope. They can be equipped e.g. with connections for cables and hoses.Detailed information on the connector pin allocation, threaded unions, etc. isgiven in separate documentation.Fig. 6-8: Connecting cables and interfaces1 Interface A3, arm2 Interface A6, tool3 Junction box, control cable X312nd control cable X41 (for SafeRobot only)4 Interface A1, energy supply system5 Connection, motor cable X3062 / 79 Issued: 19.04.2013 Version: Spez <strong>KR</strong> <strong>16</strong> <strong>arc</strong> <strong>HW</strong> V6 en (PDF)













