Medical Applications User Guide (pdf) - Freescale Semiconductor
Medical Applications User Guide (pdf) - Freescale Semiconductor
Medical Applications User Guide (pdf) - Freescale Semiconductor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Diagnostic and Therapy Devices<br />
17.2<br />
Using Motors for Patient<br />
Positioning<br />
Pressure ulcers or decubitus ulcers (bedsores)<br />
are one of the most common complications of<br />
patients who cannot change position in a bed.<br />
Bedsores can be caused by sweat, humidity<br />
and temperature but are mainly the result<br />
of unrelieved pressure applied by the bones<br />
to the skin and tissue. This is why the most<br />
common places for bedsores are the sacrum,<br />
elbows, knees and ankles.<br />
To avoid bedsores, hospitals and health<br />
care providers use irregular bed surfaces to<br />
distribute pressure along the whole body while<br />
electric motors allow the patient easily switch<br />
positions with just the push of a few buttons.<br />
Electric motors are clean and relatively<br />
efficient. This makes them a much better fit<br />
for use in hospital beds rather than pneumatic<br />
or hydraulic alternatives. An electronic motor<br />
system can be used to adjust the height of<br />
the bed and provide movement to the bed’s<br />
wheels. A typical system containing an MCU,<br />
an H-bridge and a motor is shown in<br />
Figure 17-2.<br />
The requirements for an MCU vary based<br />
on the size of the motor and the required<br />
efficiency. Most patient bed applications<br />
require between 32 to 100 MHz, 16 to 156 KB<br />
of flash memory, 2 to 64 KB of SRAM, a highly<br />
accurate timer and the ability to synchronize<br />
the timer with the analog to digital converter<br />
(ADC). The requirements for an H-bridge<br />
also vary, but most beds require a monolithic<br />
power IC comprising control logic, charge<br />
pump, gate drive and low RDS(ON) MOSFET<br />
output H-bridge circuitry in a small surface<br />
mount package.<br />
<strong>Freescale</strong> offers a wide variety of products<br />
specifically for motor control systems ranging<br />
from digital signal controllers (DSC) to MCUs<br />
and H-bridges. An ideal MCU and H-bridge<br />
solution for a bed is an MCF51AC256 paired<br />
with the flexible, low-power MC33926. In<br />
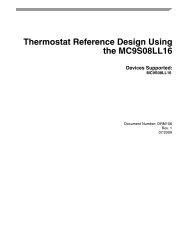
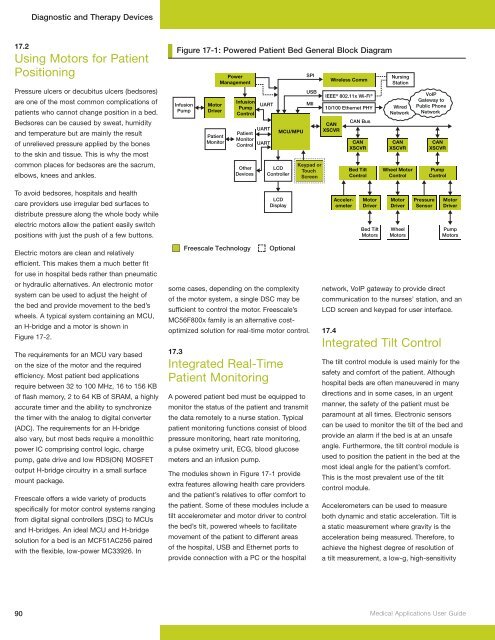
Figure 17-1: Powered Patient Bed General Block Diagram<br />
Powered Patient Bed<br />
Infusion<br />
Pump<br />
Motor<br />
Driver<br />
Patient<br />
Monitor<br />
Power<br />
Management<br />
Infusion<br />
Pump<br />
Control<br />
Patient<br />
Monitor<br />
Control<br />
Other<br />
Devices<br />
<strong>Freescale</strong> Technology<br />
Optional<br />
some cases, depending on the complexity<br />
of the motor system, a single DSC may be<br />
sufficient to control the motor. <strong>Freescale</strong>’s<br />
MC56F800x family is an alternative costoptimized<br />
solution for real-time motor control.<br />
17.3<br />
Integrated Real-Time<br />
Patient Monitoring<br />
A powered patient bed must be equipped to<br />
monitor the status of the patient and transmit<br />
the data remotely to a nurse station. Typical<br />
patient monitoring functions consist of blood<br />
pressure monitoring, heart rate monitoring,<br />
a pulse oximetry unit, ECG, blood glucose<br />
meters and an infusion pump.<br />
The modules shown in Figure 17-1 provide<br />
extra features allowing health care providers<br />
and the patient’s relatives to offer comfort to<br />
the patient. Some of these modules include a<br />
tilt accelerometer and motor driver to control<br />
the bed’s tilt, powered wheels to facilitate<br />
movement of the patient to different areas<br />
of the hospital, USB and Ethernet ports to<br />
provide connection with a PC or the hospital<br />
network, VoIP gateway to provide direct<br />
communication to the nurses’ station, and an<br />
LCD screen and keypad for user interface.<br />
17.4<br />
Integrated Tilt Control<br />
The tilt control module is used mainly for the<br />
safety and comfort of the patient. Although<br />
hospital beds are often maneuvered in many<br />
directions and in some cases, in an urgent<br />
manner, the safety of the patient must be<br />
paramount at all times. Electronic sensors<br />
can be used to monitor the tilt of the bed and<br />
provide an alarm if the bed is at an unsafe<br />
angle. Furthermore, the tilt control module is<br />
used to position the patient in the bed at the<br />
most ideal angle for the patient’s comfort.<br />
This is the most prevalent use of the tilt<br />
control module.<br />
Accelerometers can be used to measure<br />
both dynamic and static acceleration. Tilt is<br />
a static measurement where gravity is the<br />
acceleration being measured. Therefore, to<br />
achieve the highest degree of resolution of<br />
a tilt measurement, a low-g, high-sensitivity<br />
90 <strong>Medical</strong> <strong>Applications</strong> <strong>User</strong> <strong>Guide</strong><br />
UART<br />
UART<br />
UART<br />
LCD<br />
Controller<br />
LCD<br />
Display<br />
MCU/MPU<br />
SPI<br />
USB<br />
MII<br />
Keypad or<br />
Touch<br />
Screen<br />
Wireless Comm<br />
IEEE ® 802.11x Wi-Fi ®<br />
10/100 Ethernet PHY<br />
CAN<br />
XSCVR<br />
Accelerometer<br />
CAN Bus<br />
CAN<br />
XSCVR<br />
Bed Tilt<br />
Control<br />
Motor<br />
Driver<br />
Bed Tilt<br />
Motors<br />
Nursing<br />
Station<br />
Wired<br />
Network<br />
CAN<br />
XSCVR<br />
Wheel Motor<br />
Control<br />
Motor<br />
Driver<br />
Wheel<br />
Motors<br />
VoIP<br />
Gateway to<br />
Public Phone<br />
Network<br />
Pressure<br />
Sensor<br />
CAN<br />
XSCVR<br />
Pump<br />
Control<br />
Motor<br />
Driver<br />
Pump<br />
Motors