Rapport de stage - Master 2 SAR ATIAM - Base des articles ...
Rapport de stage - Master 2 SAR ATIAM - Base des articles ...
Rapport de stage - Master 2 SAR ATIAM - Base des articles ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Rapport</strong> <strong>de</strong> <strong>stage</strong> - <strong>Master</strong> 2 <strong>SAR</strong> <strong>ATIAM</strong>Thomas Hézardthomas.hezard@ircam.fr, 01 44 78 43 0230 juin 2010Sujet :Etudiant :On<strong>de</strong>s découplées et on<strong>de</strong>s progressivesdans les tubes acoustiques à section variablepour la représentation en gui<strong>de</strong>s d’on<strong>de</strong>s.Thomas Hézard<strong>Master</strong> 2 Informatique - spécialité <strong>SAR</strong> - parcours <strong>ATIAM</strong>thomas.hezard@ircam.fr, 06 67 06 43 03Laboratoire d’accueil : IRCAM - CNRS UMR 9912Equipe Analyse-Synthèse1, place Igor Stravinsky,75004 ParisEncadrant :Co-encadrant :Enseignant référent :Dr. Thomas Hélie, CR1 CNRS à l’IRCAMthomas.helie@ircam.fr, 01 44 78 48 24Dr. Rémi Mignot, Post-doctorantInstitut Langevin, ESPCI ParisTech10 rue <strong>de</strong> Vauquelin, 75005 Parisremi.mignot@espci.frEmmanuel Saint-Jamesemmanuel.saint-james@lip6.fr
version 1.3, mars 2011
Table <strong>de</strong>s matièresIntroduction 4Contexte et état <strong>de</strong> l’art 4Problème posé 5I Étu<strong>de</strong>s préliminaires 71 Cas <strong>de</strong>s tubes droits sans pertes 81.1 On<strong>de</strong>s découplées dans les tubes droits sans pertes . . . . . . . . . . . . . . . . . 81.2 Transposition <strong>de</strong> la métho<strong>de</strong> pour le cas <strong>de</strong>s tubes courbes . . . . . . . . . . . . . 102 Modèle considéré dans les tubes à section variable 102.1 Définitions <strong>de</strong> fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Modèle <strong>de</strong> Webster-Lokshin à abscisse curviligne . . . . . . . . . . . . . . . . . . 113 On<strong>de</strong>s découplées dans les tubes courbes avec le modèle <strong>de</strong> Webster-Lokshinà abscisse curviligne et apparition <strong>de</strong>s instabilités 12II Changement <strong>de</strong> variables en on<strong>de</strong>s découplées informées par la géométrie154 Adimensionnement, convention axiale et convention “tronçon” 164.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.2 Adimensionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.2.1 Variables spatiales et fonctions géométriques . . . . . . . . . . . . . . . . . 164.2.2 Variables temporelles et fonctions acoustiques . . . . . . . . . . . . . . . . 174.2.3 Modèle <strong>de</strong> Webster-Lokshin . . . . . . . . . . . . . . . . . . . . . . . . . . 174.3 Convention axiale et convention “tronçon” . . . . . . . . . . . . . . . . . . . . . . 175 Considérations géométriques 185.1 Paramétrisation du rayon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185.2 Profils physiquement réalistes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206 Résolution du modèle et diagonalisation <strong>de</strong> la matrice <strong>de</strong> transfert acoustique 216.1 Résolution du modèle <strong>de</strong> Webster-Lokshin à abscisse curviligne . . . . . . . . . . 216.2 Recherche d’on<strong>de</strong>s découplées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.2.1 Démarche adoptée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.2.2 Recherche <strong>de</strong>s valeurs propres . . . . . . . . . . . . . . . . . . . . . . . . . 236.2.3 Paramétrisation <strong>de</strong>s espaces propres . . . . . . . . . . . . . . . . . . . . . 246.3 Etu<strong>de</strong>s et interprétation <strong>de</strong>s valeurs propres . . . . . . . . . . . . . . . . . . . . . 26Conclusion et perspectives 462
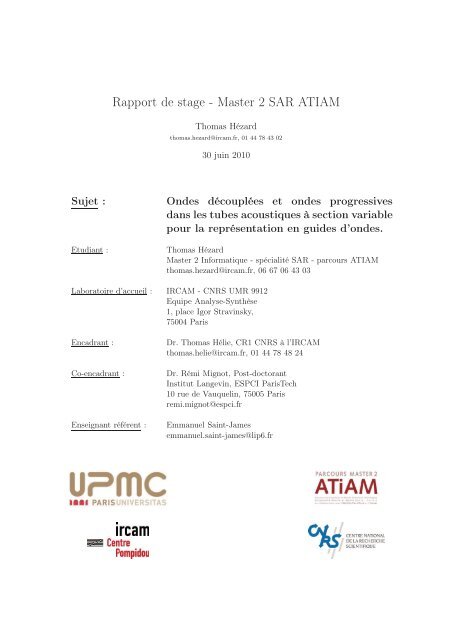
Table <strong>de</strong>s figures1 Propagation d’on<strong>de</strong>s découplées dans un tube droit . . . . . . . . . . . . . . . . . 92 Fonctions φ 1 et φ 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103 Fonctions Φ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114 Tronçon à profil convexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135 Tube à rayon négatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146 Convention axiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187 Convention tronçon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188 Fonctions S l et S r pour Υ < 0 (en haut), Υ = 0 (au milieu) et Υ > 0 (en bas) . . 209 Décomposition en quadripôles <strong>de</strong> transfert. . . . . . . . . . . . . . . . . . . . . . . 2510 3 types <strong>de</strong> tubes évasés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2711 Catégorisation <strong>de</strong>s différentes géométries <strong>de</strong> tube . . . . . . . . . . . . . . . . . . 2812 Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, tube concave (à gauche) ettube conique (à droite) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2913 Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, géométrie <strong>de</strong> type S (àgauche) et géométrie <strong>de</strong> type exponentiel (à droite) . . . . . . . . . . . . . . . . . 3014 Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, géométrie <strong>de</strong> type C . . . . 3115 Evolution <strong>de</strong>s diagrammes <strong>de</strong> Bo<strong>de</strong> <strong>de</strong>s valeurs propres en fonction <strong>de</strong> Υ . . . . . 453
IntroductionContexte et état <strong>de</strong> l’artLa modélisation physique <strong>de</strong>s instruments <strong>de</strong> musique a un intérêt majeur en synthèse sonore.En effet, elle permet <strong>de</strong> reproduire le comportement complet <strong>de</strong> l’instrument, incluant parexemple les transitoires d’attaque, <strong>de</strong> façon naturelle. Si la modélisation physique n’est pas uneidée nouvelle, les avancées récentes dans ce domaine ont montré l’importance et l’intérêt <strong>de</strong> cetoutil <strong>de</strong> modélisation comme en témoigne le nombre croissant <strong>de</strong> logiciels musicaux utilisant cetype <strong>de</strong> simulation.Nous nous intéressons ici à la modélisation physique <strong>de</strong>s tubes acoustiques pour la simulationréaliste <strong>de</strong>s instruments à vent, et plus précisément <strong>de</strong>s cuivres. Deux hypothèses historiquesprécè<strong>de</strong>nt l’ensemble <strong>de</strong>s travaux présentés ici : l’influence <strong>de</strong> l’enroulement <strong>de</strong> l’instrument estnégligé et les tubes déroulés sont considérés comme axisymétriques. Ainsi un tube acoustique estentièrement décrit par son profil (aussi appelé “perce”) : le relevé du rayon du tube le long <strong>de</strong>son axe <strong>de</strong> symétrie.Des travaux réalisés à l’IRCAM ont permis d’aboutir à <strong>de</strong>s modèles réalistes et efficaces <strong>de</strong>propagation dans les instruments à vent basés le modèle <strong>de</strong> Webster-Lokshin à abscisse curviligne[1]. Contrairement aux modèles précé<strong>de</strong>nts, ces modèles introduisent la prise en compte <strong>de</strong> lacourbure du rayon <strong>de</strong>s tubes et <strong>de</strong>s pertes visco-thermiques à la paroi interne du tube. Souscertaines contraintes, ce modèle a été résolu sous la forme d’une matrice <strong>de</strong> transfert acoustiqueliant le couple pression/débit à la sortie du tube au couple pression/débit à l’entrée du tube.Les gui<strong>de</strong>s d’on<strong>de</strong> [2, 3, 4] sont <strong>de</strong>s structures bien adaptées à la synthèse temsp-réel et <strong>de</strong>spremiers résultats aboutissant à <strong>de</strong>s structures <strong>de</strong> Kelly-Lochbaum pour les tubes courbes ontété trouvés [5, 6]. Une étu<strong>de</strong> plus récente a permis <strong>de</strong> mettre en oeuvre <strong>de</strong>s structures en gui<strong>de</strong>sd’on<strong>de</strong> bien adaptées à la synthèse sonore temps-réel [6]. Ces modèles sont basés sur une décompositionen quadripôles <strong>de</strong> transfert <strong>de</strong>s matrices <strong>de</strong> transfert acoustique solutions du modèle <strong>de</strong>Webster-Lokshin à abscisse curviligne.L’étu<strong>de</strong> présentée ici se place, entre autres, dans le cadre d’un travail sur <strong>de</strong>s outils informatiquespour la lutherie. En effet, <strong>de</strong>s travaux récents ont permis <strong>de</strong> mettre en oeuvre <strong>de</strong>s premiersoutils permettant l’estimation d’un modèle géométrique d’un profil d’instrument quelconque permettantla résolution du modèle <strong>de</strong> Webster-Lokshin [7] (joint à la fin <strong>de</strong> ce document). Ainsi, ilest aujourd’hui possible, à partir du relevé <strong>de</strong> la perce d’un instrument existant ou bien du tracé<strong>de</strong> la perce d’un instrument avant sa première fabrication, <strong>de</strong> calculer <strong>de</strong>s paramètres acoustiquestels que impédance et transmittance ou d’obtenir une version simulable en temps-réel <strong>de</strong>l’instrument.4
Première partieÉtu<strong>de</strong>s préliminairesDans un premier temps, nous reprenons le cas simple <strong>de</strong>s on<strong>de</strong>s planes se propageant dans untube droit sans pertes. Nous rappelons <strong>de</strong>ux métho<strong>de</strong>s qui permettent d’aboutir à la définition<strong>de</strong>s on<strong>de</strong>s planes progressives. Nous donnons alors quelques interprétations sur le sens acoustique<strong>de</strong>s quantités mises en jeu dans ces métho<strong>de</strong>s.Dans un second temps, nous considérons le changement d’état “standard” utilisé pour définirles on<strong>de</strong>s progressives sur le modèle <strong>de</strong> Webster-Lokshin. Enfin, nous donnons <strong>de</strong> premièresinterprétations <strong>de</strong>s instabilités qui apparaissent dans la décomposition en gui<strong>de</strong>s d’on<strong>de</strong>s à lalumière <strong>de</strong>s informations apportées par la première étu<strong>de</strong> sur les on<strong>de</strong>s planes.7
1 Cas <strong>de</strong>s tubes droits sans pertes1.1 On<strong>de</strong>s découplées dans les tubes droits sans pertesConsidérons en premier lieu un problème <strong>de</strong> propagation acoustique linéaire d’on<strong>de</strong>s planesdans un tube droit sans pertes. Les équations d’Euler et <strong>de</strong> la conservation <strong>de</strong> la masse sontdonnées par ⎧⎨∂ t⃗1 V + gradP ⃗ = 0,ρ 0⎩∂ t P +ρ 0 c 2 0 divV ⃗ (1)= 0,et peuvent s’écrire sous la forme∂ x X p +M p ∂ t X p = 0, (2)où x est la variable spatiale qui décrit l’axe <strong>de</strong> symétrie du tube et où le vecteur d’état acoustiqueX p et la matrice M p sont donnés par les expressionsX p =M p =[ ] P, (3)V⎡ ⎤0 ρ 0⎣ 1 ⎦ , (4)0ρ 0 c 2 0où ρ 0 est la <strong>de</strong>nsité <strong>de</strong> l’air, c 0 la célérité du son dans le milieu, P la pression acoustique et V lavitesse.On<strong>de</strong>s progressives : Méto<strong>de</strong> 1 Pour trouver <strong>de</strong>s on<strong>de</strong>s découplées localement (i.e. en toutpoint du volume), il suffit <strong>de</strong> diagonaliser la matrice M p . Les valeurs propres calculées sontλ + = 1 c 0et λ − = − 1 c 0. (6)Nous avons <strong>de</strong>ux valeurs propres <strong>de</strong> multiplicité 1 donc la matrice <strong>de</strong> passage possè<strong>de</strong> <strong>de</strong>ux <strong>de</strong>grés<strong>de</strong> liberté. Un choix classique permet d’obtenir la matrice <strong>de</strong> passage⎡P p = ⎣ 2 2⎤2− 2 ⎦ (7)ρ 0 c 0 ρ 0 c 0et son inverseP p −1 =On peut donc mettre l’équation (2) sous la forme(5)[ ] 1 ρ0 c 0. (8)1 −ρ 0 c 0[ 1]∂ x Y p +c 000 − 1 ∂ t Y p = 0. (9)c 0où Y p = P −1 p X p est le vecteur <strong>de</strong>s on<strong>de</strong>s progressives découplées se propageant dans le tube.On retrouve les on<strong>de</strong>s classiques[ ] [ ] p+ P +Z0 VY p =p − =(10)P −Z 0 V8
où Z 0 = ρ 0 c 0 définit l’impédance caractéristique du milieu <strong>de</strong> propagation.On note s la variable <strong>de</strong> Laplace dans le plan complexe. Le transformée <strong>de</strong> Laplace (pourlaquelle un multiplication par s correspond à une dérivation temporelle et une division par scorrespond à une intégration temporelle) <strong>de</strong> (9) s’écrit[ 1]∂ x Y p +sc 000 − 1 Y p = 0. (11)c 0On<strong>de</strong>s progressives : Méto<strong>de</strong> 2 Un secon<strong>de</strong> manière <strong>de</strong> retrouver (9) consiste à factoriserl’opérateur d’Alembertien, dans le domaine <strong>de</strong> Laplace, sous la forme∆− 1c 02 s2 = ( ∂ x −λ + s )( ∂ x +λ − s ) (12)Les opérateurs qui “propagent” les variables d’on<strong>de</strong>s (appelés “opérateurs <strong>de</strong> propagation”) dansun tube droit entre les abscisses a et b sont alorsT + p (L,s) = e −sLc 0 , p + (b,s) = T + p (L,s)p + (a,s),T − p (L,s) = e sLc 0 , p − (b,s) = T − p (L,s)p − (a,s),L = b−a.(13)On remarque que T − p (L,s) = T + p (L,s) −1 . On notera donc plus volontiersp + (b,s) = T p (L,s)p + (a,s),p − (a,s) = T p (L,s)p − (b,s),T p (L,s) = T + p (L,s). (14)ce qui met est évi<strong>de</strong>nce la structure en gui<strong>de</strong>s d’on<strong>de</strong>s présentée en figure 1.p + (a)p + (b)e −sL c 0e − sc 0p − (a)p − (b)Figure 1 – Propagation d’on<strong>de</strong>s découplées dans un tube droite −sLc 0étant le retard pur induit par la propagation dans un tube <strong>de</strong> longueur L, on définitalors “l’opérateur <strong>de</strong> dispersion” D p (s,L) :T p (s,L) = e −sLc 0 D p (s,L). (15)Dans le cas <strong>de</strong>s on<strong>de</strong>s planes que nous étudions ici, D p (s,L) = 1, ce qui signifie que les on<strong>de</strong>sp + et p − sont retardées mais ne sont pas modifiées lorsqu’elles se propagent dans un tube droitsans pertes9
1.2 Transposition <strong>de</strong> la métho<strong>de</strong> pour le cas <strong>de</strong>s tubes courbesDans le cas <strong>de</strong>s tubes à section variable, nous nous plaçons sous les hypothèses du modèle <strong>de</strong>Webster-Lokshin à abscisse curviligne que nous présenterons en section 2. L’objectif <strong>de</strong> la partieII est <strong>de</strong> trouver <strong>de</strong>s on<strong>de</strong>s découplées dans les tubes courbes, à l’instar <strong>de</strong>s on<strong>de</strong>s planes dans lestubes droits. La métho<strong>de</strong> mise en oeuvre diffère quelque peu <strong>de</strong> celle présentée ci-<strong>de</strong>ssus. En effet,la diagonalisation sera effectuée sur la matrice <strong>de</strong> transfert obtenue par résolution du modèle etnon sur les équations du modèle lui-même. De plus, <strong>de</strong>s conditions <strong>de</strong> réalisme physique du tubeétudié seront injectées dans la matrice <strong>de</strong> transfert avant diagonalisation.Ainsi, nous pourrons étudier les opérateurs <strong>de</strong> propagation et <strong>de</strong> dispersion trouvé dans lestubes à section variable avec le modèle <strong>de</strong> Webster-Lokshin à abscisse curviligne.2 Modèle considéré dans les tubes à section variable2.1 Définitions <strong>de</strong> fonctionsComme nous allons le voir par la suite, plusieurs fonctions jouent un rôle prépondérant dansle problème et apparaissent à <strong>de</strong> nombreuses reprises, tant dans les formules liées à la géométrieque dans celles liées à l’acoustique et à la propagation <strong>de</strong>s on<strong>de</strong>s dans le tube.φ 1 : x ↦→ ∑ k≥0x k(2k)!et φ 2 : x ↦→ ∑ k≥0x k(2k +1)!(16)sont analytiques surCdoncC ∞ (R) et développables en série entière avec un rayon <strong>de</strong> convergenceinfini. Elles sont présentées en figure 2 sur l’axe réel. Ces <strong>de</strong>ux figures font apparaître <strong>de</strong>ux valeursφ1(z)454035302520151050−5−20 −15 −10 −5 0 5 10 15 20zφ2(z)109876543210−20 −15 −10 −5 0 5 10 15 20zFigure 2 – Fonctions φ 1 et φ 2limites clés que nous retrouveront tout au long <strong>de</strong> l’étu<strong>de</strong> :– −π 2 est la valeur pour laquelle φ 2 (z) s’annule et φ 1 (z) atteint son minimum– −π 2 /4 est la valeur pour laquelle φ 1 (z) s’annuleOn définit <strong>de</strong> plus la fonction Φ, qui apparaîtra régulièrement dans la suite, parΦ : x ↦→ φ 1(x)φ 2 (x) . (17)Cette fonction est présentée en figure 3 sur l’axe réel. On retrouve ici la valeur −π 2 d’annulation10
2015105Φ(z)0−5−10−15−20−15 −10 −5 0 5 10 15zFigure 3 – Fonctions Φ<strong>de</strong> φ 2 qui <strong>de</strong>vient une singularité <strong>de</strong> Φ et la valeur −π 2 /4 pour laquelle Φ s’annule.Remarque : ces fonctions peuvent s’écrire (indépen<strong>de</strong>mment du choix <strong>de</strong> √ . )φ 1 (x) = cosh (√ x ) ,⎧⎨ sinh( √ x)√ si x ≠ 0φ 2 (x) = x⎩1 si x = 0√ xΦ(x) =tanh( √ x).2.2 Modèle <strong>de</strong> Webster-Lokshin à abscisse curviligneLe premier modèle <strong>de</strong> tube acoustique à dépendance mono-spatiale fut établi par Lagrange [13]et Bernoulli [14]. Cette équation est dite “<strong>de</strong> Webster” [15] et a été abondamment étudiée [16].Pour les pertes, les premières étu<strong>de</strong>s ont été initiées par Kirchhoff [17]. On pourra retrouver l’ensemble<strong>de</strong> ces éléments bibliographique dans [18] et aussi dans [7] (joint à la fin <strong>de</strong> ce document).Les effets <strong>de</strong> courbure et <strong>de</strong> pertes sont finalement regroupés dans le modèle dit “<strong>de</strong> Webster-Lokshin” à <strong>de</strong>pendance en l’abscisse curviligne [1, 19].Soit un profil <strong>de</strong> tube z ↦→ r(z). Le passage en abscisse curviligne s’écrit en mesurant lalongueur <strong>de</strong> la paroi <strong>de</strong>puis z = 0, L(z) = ∫ z√ 0 1+r ′ (w) 2 dw. On note l’abscisse curvilignel = L(z) et on a alorsR ( L(z) ) = r(z) et R(l) = r ( L −1 (l) ) . (18)En notant P(l,t) la pression dans le tube à l’abscisse l et à l’instant t, l’équation <strong>de</strong> Webster-Lokshin, établit dans [1], s’écrit()∂l 2 (l)+2R′ R(l) ∂ l − 1c 2 ∂2 t − 2ε(l) ∂ 3 2t P(l,t) = 0 (19)0√1−Roù c 0 est la vitesse du son et ε(l) = κ ′ (l) 20 R(l)quantifie les effets visco-thermiques (κ 0 ≈3×10 −4 m 1/2 dans l’air). Cette équation est appelée équation <strong>de</strong> Webster en raison <strong>de</strong> la présencedu terme 2 R′ (l)R(l) ∂ l et équation <strong>de</strong> Lokshin en raison <strong>de</strong> la présence du terme 2ε(l)c 032∂ 3 2t .113c 0 2
oùDans le domaine <strong>de</strong> Laplace, le modèle <strong>de</strong> Webster-Lokshin complet s’écrit(∂ 2 l − Γ(s)2) [R(l)P(l,s)] = 0 (20)ρ 0 s U(l,s)S(l)+ ∂ l P(l,s) = 0 (21)Γ(s) 2 = 1c2 s2 + 2ε(l)3s 3 2 +Υ(l) (22)0 c 0 2avec Υ(l) = R′′ (l)R(l) , S(l) = πR(l)2 et U(l,t) = S(l)V(l,t) définit un débit acoustique.Remarque : la fonction Γ est définie comme une racine complexe. L’analyse complexe et notammentles racines complexes posent plusieurs problèmes théoriques que nous n’abor<strong>de</strong>ront pasici. Nous considérerons dans ce document que les fonctions définies avec <strong>de</strong>s racines complexesne posent aucun problème <strong>de</strong> définition sur C + 0 (le <strong>de</strong>mi-plan droit <strong>de</strong> Laplace).L’énergie acoustique s’écrite ac (l,t) = πR(l,t) 2 ( ρ2 V(l,t)2 + 12ρc 2P(l,t)2 ). (23)et on montre que le modèle sans pertes (ε = 0) est conservatif. Pour la cas avec pertes, il fautmener l’étu<strong>de</strong> en utilisant les énergies acoustiques étendues [20, 21].3 On<strong>de</strong>s découplées dans les tubes courbes avec le modèle <strong>de</strong>Webster-Lokshin à abscisse curviligne et apparition <strong>de</strong>s instabilitésLe modèle (20-21) peut être résolu analytiquement dans le cas où les paramètres Υ(l) et ε(l)sont constants. On définit alors un “tronçon”, portion <strong>de</strong> tube pour lequel Υ(l) est constant. Dansun tronçon, ε(l) est approximé par par sa valeur moyenne ε(l) ≈ ε = 1 ∫ LL 0ε(l)dl et le modèle<strong>de</strong> Webster-Lokshin peut être résolu.Considérons un tronçon à Υ constant <strong>de</strong> longueur L (on suppose que le tronçon est définientre les abscisses −L/2 et L/2), on note R l et R r les rayons du tronçon à gauche et à droite.Une résolution du modèle (20-21) pour la propagation entre les abscisses −L/2 et L/2 est donnéepar la matrice <strong>de</strong> transfert acoustique Q(s) (détaillée en partie 6.1)⎡[ (PL2 ,s)]U ( ⎢L2 ,s) = ⎣L0R r0πR rρ 0 s⎤⎡⎥ ⎢⎦Q(s) ⎣R lL0⎤[ (0 ⎥ P −L2ρ 0 s ⎦,s)]U ( − L 2πR ,s) . (24)lUne représentation gui<strong>de</strong>s d’on<strong>de</strong>s sous la forme d’une succession <strong>de</strong> quadripôles <strong>de</strong> transfert estdonnée dans [6]. Cette <strong>de</strong>rnière représentation est tout à fait adaptée à la simulation temps-réel(le travail d’implémentation a d’ailleurs déjà été en partie mis en oeuvre [22]). Cependant, ellepose <strong>de</strong>s problèmes <strong>de</strong> stabilité dans le cas où le paramètre Υ <strong>de</strong>vient négatif. Nous allons tenterici d’expliquer pourquoi en nous basant sur un interprétation physique <strong>de</strong> la décomposition enquadripôles présentée dans [6].12
Profil avec Υ = 4, R l = 0.1 et R r = 0.20.20.15R1(l) et −R1(l)0.10.050−0.05−0.1−0.15−0.2−0.5 0 0.5lFigure 4 – Tronçon à profil convexePrenons le cas d’un tronçon <strong>de</strong> tube à section variable <strong>de</strong> longueur 1 avec Υ = 2, R l = 0.05et R r = 0.2 (nous verrons en section 5 que ces trois paramètres suffisent à décrire entièrement letronçon); ce tronçon est tracé en figure 4.La décomposition en quadripôles proposée dans [6] fait apparaître les réflexions internes dutube semi-infini ayant le même paramètre Υ mais se continuant à l’infini à gauche et à droite. Eneffet, l’expression <strong>de</strong> la fonction <strong>de</strong> reflexion interne du tube aux abscisses −L/2 et L/2 nécessite<strong>de</strong> fixer <strong>de</strong>s conditions frontières aux extrémités du tronçon (ces fonctions <strong>de</strong> reflexions internesseront modifiées lors <strong>de</strong> la concaténation du tronçon avec une impédance <strong>de</strong> rayonnement ou unautre tronçon). Les conditions frontières choisies dans [6] sont celles d’un tube semi-infini quiprolonge le tronçon existant avec le même paramètre Υ.Autrement dit, la réflexion interne vue <strong>de</strong>puis l’intérieur du tube du côté droit est celle dutube décrit par le rayon R 1 (l) ∀l ∈ [0, ∞] et la réflexion interne vu <strong>de</strong>puis l’intérieur du tubedu côté gauche est celle du tube décrit par le rayon R 1 (l) ∀l ∈ [−∞, L].Ceci ne pose pas <strong>de</strong> problème tant que Υ est positif car le rayon tend vers ∞ en ±∞. Enrevanche, lorsque Υ <strong>de</strong>vient négatif, comme le montre les équations (39-41) le rayon ne s’exprimeplus à l’ai<strong>de</strong> <strong>de</strong>s fonctions cosh et sinh mais à l’ai<strong>de</strong> <strong>de</strong>s fonctions cos et sin. Ceci implique quele rayon peut s’annuler lorsque la longueur <strong>de</strong>vient trop gran<strong>de</strong> ou que Υ <strong>de</strong>vient trop négatifcomme l’illustre la figure 5. On définit alors la longueur critique d’un tronçon <strong>de</strong> tube pour unΥ donné (ou un Υ critique pour une longueur donnée) au-<strong>de</strong>là <strong>de</strong> laquelle le rayon s’annule àl’intérieur <strong>de</strong> son ensemble <strong>de</strong> définition. Cette valeur est précisément L crit = √ π . |Υ|Dans le cas Υ < 0, les tubes semi-infinis ont un rayon présentant une périodicité spatiale etétant alternativement positif et négatif. Un rayon négatif n’a évi<strong>de</strong>mment aucun sens physiqueet on ne peut pas s’attendre à <strong>de</strong>s comportements naturels avec <strong>de</strong> telles considérations.Une précé<strong>de</strong>nte étu<strong>de</strong> [6] a montré que, quand Υ est négatif, les passage par 0 successifsdu rayon jusqu’à l’infini provoquent l’apparition d’un continuum <strong>de</strong> pôles sur la partie positive<strong>de</strong> l’axe réel pour les fonctions <strong>de</strong> réflexion internes dans la décomposition en quadripôles <strong>de</strong>transfert. Ceci explique donc l’apparition <strong>de</strong>s instabilités dans cette décomposition.13
Υ = −40.30.2R(l) et −R(l)0.10−0.1−0.2−0.30 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Figure 5 – Tube à rayon négatiflIl est toutefois possible <strong>de</strong> donner une autre interprétation <strong>de</strong>s instabilités qui apparaissentdans la décomposition en quadripôles. En effet, Γ(s) étant un opérateur uniquement temporel (ilne fait pas apparaître <strong>de</strong> dérivée selon l) on peut écrire une sorte <strong>de</strong> d’Alembertien étendu pourle modèle <strong>de</strong> Webster-Lokshin :∂ 2 l −Γ(s)2 = ( ∂ l −Γ(s) )( ∂ l +Γ(s) ) (25)L’opérateur <strong>de</strong> dispersion pour le modèle <strong>de</strong> Webster-Lokshin est alorsD(s) = e s−Γ(s) . (26)D’après ce que l’on a dit précé<strong>de</strong>mment, on peut interpréter ce résultat comme le fait que l’onramène <strong>de</strong>s réflexions liées à <strong>de</strong>s tubes semi-infinis à l’intérieur même <strong>de</strong> l’opérateur <strong>de</strong> dispersiond’où les instabilités dans le cas Υ < 0. De plus, d’un point <strong>de</strong> vue plus “traitement <strong>de</strong> signal”,nous verrons plus tard que l’opérateur <strong>de</strong> dispersion D(s) est un filtre instable dans le cas Υ < 0.La condition sur la géométrie du profil à injecter dans la matrice <strong>de</strong> transfert est donc toutetrouvée, il s’agit <strong>de</strong> la positivité du rayon.14
Deuxième partieChangement <strong>de</strong> variables en on<strong>de</strong>s découpléesinformées par la géométrieL’objectif <strong>de</strong> cette partie est <strong>de</strong> définir <strong>de</strong> nouvelles on<strong>de</strong>s découplées, se propageant dans lestubes et permettant d’obtenir une structure gui<strong>de</strong>s d’on<strong>de</strong>s stable. Ce travail ce divise en <strong>de</strong>uxgran<strong>de</strong>s étapes. La première consiste à trouver <strong>de</strong>s conditions sur les paramètres géométriquesqui assurent que le profil <strong>de</strong> tube sur lequel nous travaillons est physiquement réaliste (la positivitédu rayon). Ensuite, nous souhaitons injecter ces conditions dans la matrice <strong>de</strong> transfertacoustique solution du modèle <strong>de</strong> Webster-Lokshin avant <strong>de</strong> diagonaliser cette <strong>de</strong>rnière. Ainsi,nous espérons trouver <strong>de</strong> nouvelles définitions d’on<strong>de</strong>s progressives découplées à l’intérieur d’untube à section variable dans lesquelles sont “inscrites” les conditions physiques <strong>de</strong> réalisme dutube. Nous <strong>de</strong>vrions <strong>de</strong> cette façon éviter les problèmes d’instabilité présentés en partie I.Une étape préliminaire consiste à définir <strong>de</strong>s quantités adimensionnées invariantes par changementd’orientation du tronçon (invariante par inversion entrée/sortie). Les formules <strong>de</strong> passageprincipales entre les variables dimensionnées et les variables adimensionnées sont données ensection 4, <strong>de</strong>s formules plus détaillées sont fournies en annexe.15
4 Adimensionnement, convention axiale et convention “tronçon”4.1 NotationsA l’exception <strong>de</strong> quelques variables qui possè<strong>de</strong>nt un nom différent en version dimensionnéeet en version adimensionnée, les notation suivantes sont respectées dans le reste du document :– les variables et les paramètres dimensionnés sont notées avec un˜,– les variables et les paramètres adimensionnés sont notées sans˜,– les variables dépendant <strong>de</strong> la variable spatiale sont notées, en convention axiale, A(l) ouA(x),– les variables dépendant <strong>de</strong> la variable spatiale sont notées, en convention tronçon, A l ouA r (l pour left, r pout right).4.2 AdimensionnementL’adimensionnement <strong>de</strong>s variables nous permet <strong>de</strong> faire disparaître toutes les constantes physiques(c 0 ,ρ 0 etc.) <strong>de</strong>s équations du modèle et ainsi <strong>de</strong> gar<strong>de</strong>r uniquement les quantités essentiellesà la compréhension physique <strong>de</strong>s phénomènes mis en jeu. L’adimensionnement touche tous lestypes <strong>de</strong> variables du problèmes : variables géométriques, variables <strong>de</strong> Kirchhoff, fonctions d’on<strong>de</strong>setc. Comme nous le verrons tout au long <strong>de</strong> cette section, la valeur clé pour l’adimensionnementest la longueur L du tube considéré. Ainsi, l’adimensionnement est propre à un tronçon et lors<strong>de</strong> la connexion <strong>de</strong> tronçons les uns aux autres, il faudra prendre soin <strong>de</strong> redimensionner lesvariables.4.2.1 Variables spatiales et fonctions géométriquesSoit un tronçon <strong>de</strong> tube <strong>de</strong> longueur L décrit par sa perce R(l), l ∈ [a, b] (on a L = b−a).La variable spatiale indépendante adimensionnée est notée x et l’adimensionnement se résume àla transformation[l ∈ [a,b] ↦−→ x ∈ − 1 2 , 1 ]. (27)2Les formules <strong>de</strong> passage entre la variable x et la variable l s’écrivent alorsa+bl−2x = X(l) = ,L(28)l = L(x) = Lx+ a+b .2(29)Dans le cas a = − L 2 ,b = L 2, les formules <strong>de</strong> passage <strong>de</strong>viennent simplementLe rayon ˜R(l) est adimensionné <strong>de</strong> la façon suivantex = X(l) = l L , (30)l = L(x) = Lx. (31)R(x) = 1 L ˜R ( L(x) ) ,˜R(l) = LR ( X(l) ) .(32)et on aΥ = L 2 ˜Υ,˜Υ = 1 L 2 Υ. (33)16
4.2.2 Variables temporelles et fonctions acoustiquesL’adimensionnement dans le domaine temporel (et dans le domaine <strong>de</strong> Laplace) est effectuépar rapport au temps <strong>de</strong> propagation d’une on<strong>de</strong> sonore dans un tube <strong>de</strong> longueur L :t = c 0L˜t, s = L c 0˜s,˜t = L c 0t, ˜s = c 0L s. (34)On en déduit l’adimensionnement du paramètre ˜ε et <strong>de</strong> la fonction ˜Γ(˜s)ε = √ L˜ε, ˜ε = 1 √Lε, (35)( c0) √Γ(s) = L˜ΓL s = s 2 +Υ+2εs 3 2 ,√˜Γ(˜s) = 1 ( ) ( ) L ˜s 2 ( )3(36)L Γ = +c 0˜sc ˜Υ+2ε ˜s 2.0 c 0Les variables <strong>de</strong> Kirchhoff sont adimensionnées respectivement par rapport à la pression <strong>de</strong>référence ρ 0 c 2 20 et au débit <strong>de</strong> référence c 0˜S(l) (où ˜S(l) = π˜R(l) )P(x,t) = 1 (ρ 0 c ˜P L(x), L )(1t U(x,t) =2 0 c 0 c 0 S ( L(x) ) Ũ L(x), L )tc(0˜P(l,t) = ρc 2 0 P X(l), c )0L t Ũ(l,t) = c 0 L 2˜S( ) (X(l) U X(l), c ) (37)0L tL’adimensionnement <strong>de</strong>s différentes variables d’on<strong>de</strong>s définies dans [6] est explicité en annexe.4.2.3 Modèle <strong>de</strong> Webster-LokshinEn variables adimensionnées et dans le domaine <strong>de</strong> Laplace, le modèle <strong>de</strong> Webster-Lokshins’écrit { [ ]( )s 2 +Υ+2εs 3 2 −∂x2 R(x)P(x,s) = 0sU(x,s)+∂ x P(x,s) = 0Nous avons bien réussi à faire disparaître toutes les constantes physiques du problème. Nousallons donc pouvoir nous concentrer sur la compréhension physique <strong>de</strong>s phénomènes et la recherched’on<strong>de</strong>s découplées informées par la géométrie. Cependant, nous <strong>de</strong>vons d’abord abor<strong>de</strong>rce que nous avons appelé la “convention tronçon”.4.3 Convention axiale et convention “tronçon”La convention axiale est en fait celle qui est implicitement utilisée dans la partie I. Considérerun tronçon <strong>de</strong> tube en convention axiale consiste à définir une extrémité comme étant l’entréeet l’autre comme étant la sortie et à considérer les différentes variables et fonctions le long dutube. On écrit par exemple P(x,t) ou σ(x) pour x ∈ [−1/2,1/2]. L’inconvénient <strong>de</strong> ce paradigmeest que les expressions <strong>de</strong>s variables et <strong>de</strong>s matrices <strong>de</strong> transfert acoustiques se voient modifiéeslorsque l’on retourne le tube (l’entrée <strong>de</strong>vient la sortie et vice-versa, transformation que l’on peutsymboliser par la symétrie x ↦→ −x) alors que le tube est le même. Pour s’en convaincre, il suffit<strong>de</strong> prendre l’exemple du débit acoustique : si l’on retourne le tube et que l’on gar<strong>de</strong> la mêmeconvention alors U(x) <strong>de</strong>vient à −U(−x) et non U(−x).17
La convention appelée “convention tronçon” permet <strong>de</strong> définir <strong>de</strong>s variables et <strong>de</strong>s matrices<strong>de</strong> transfert acoustiques qui ne sont pas modifiées par la symétrie x ↦→ −x. Pour cela, nousne considérons plus les variables et les fonctions pour x ∈ [−1/2,1/2] mais uniquement auxextrémités du tronçon car ce sont ces <strong>de</strong>rnières qui nous intéressent pour établir les matrices<strong>de</strong> transfert. Les variables au point x = −1/2 sont notées avec un indice . l (pour left) et lesvariables au point x = 1/2 sont notées avec un indice . r (pour right). En convention tronçon,la symétrie x ↦→ −x revient alors simplement à inverser les indices . l et . r dans les différentesfonctions, variables et matrices <strong>de</strong> passage.La convention tronçon repose sur un principe simple : les quantités dirigées sont orientéesvers l’intérieur du tube. Ainsi le débit à l’extrémité gauche du tube n’est pas modifié entre laconvention axiale et la convention tronçon, U l = U(−1/2), mais le débit à l’extrémité droite dutube se transforme en son opposée, U r = −U(1/2). De même pour les pentes normalisées σ l etσ r . Les variables d’on<strong>de</strong>s ne sont plus notées φ + ou φ − mais φ in ou φ out .Les figures 6 et 7 illustrent comment les variables <strong>de</strong> Kirchhoff et les variables d’on<strong>de</strong>s sphériquesprésentées en partie I sont modifiées entre la convention axiale et la convention tronçon.Les formules <strong>de</strong> passage en convention axiale et en convention tronçon sont indiquées ci-après.φ +( − 1 2 ,s)φ +( 1U ( − 1 )2 ,s)2U ( )12φ −( − 1 2 ,s) φ −( 12 ,s)U lφ inl(s)φ outl(s)φ outr (s)φ inr (s)U rFigure 6 – Convention axialeFigure 7 – Convention tronçonσ(l) = R′ (l)R(l)σ l = R′ (− 1 2 )R(− 1 2 ) , σ r = − R′ ( 1 2 )R( 1 2 )[ ] φ+φ − = R [ ][ 1 1 P2 1 −1 U[ ] P= 1 [ 1 1U R 1 −1][ φ+φ − ]] [φinl/rφ outl/r[Pl/r]U l/r]= R l/r2[ 1 11 −1= 1R l/r[ 1 11 −1][Pl/rU l/r]] [ φ inl/rφ outl/r]5 Considérations géométriques5.1 Paramétrisation du rayonComme nous l’avons dit, le modèle (20-21) peut être résolu analytiquement dans le cas où lesparamètres ˜Υ(l) et ˜ε(l) sont constants. Pour le paramètre ˜ε, on fait le choix ˜ε(l) ≈ 1 ∫ LL 0 ˜ε(l)dl.La constance du paramètre ˜Υ(l) induit l’équation˜R ′′ (l)− ˜Υ˜R(l) = 0. (38)18
Cette équation se résout <strong>de</strong> façon classique selon la valeur <strong>de</strong> ˜Υ(√ ) (√ )˜Υ < 0 : ˜R(l) = Ãcos −˜Υl + ˜Bsin −˜Υlavec (Ã, ˜B) ∈ R 2 , (39)˜Υ = 0 : ˜R(l) = Ã+ ˜Bl avec (Ã, ˜B) ∈ R 2 , (40))˜Υ > 0 : ˜R(l) = Ãcosh(√˜Υl + ˜Bsinh) (√˜Υl avec (Ã, ˜B) ∈ R 2 . (41)Cependant, on a montré dans [22] que ces écritures peuvent être unifiées à l’ai<strong>de</strong> <strong>de</strong>s fonctionsC et S{ C : (l,Υ) ↦→ φ1(Υl2 )S : (l,Υ) ↦→ lφ 2(Υl2 ) , (42)˜R(l) = ÃC(l, ˜Υ) + ˜BS(l, ˜Υ). (43)Par définition, les fonctions C et S sont C ∞ en Υ et en l, ce qui nous assure la continuité dumodèle géométrique en Υ.Ceci définit une famille <strong>de</strong> tronçons paramétrés pour lesquels le modèle <strong>de</strong> Webster-Lokshinà abscisse curviligne peut être résolu analytiquement. Un tronçon est entièrement définit par lesparamètres (Ã, ˜B, ˜Υ). De plus, si on considère <strong>de</strong>s tronçons <strong>de</strong> tube <strong>de</strong> longueur L sur l’intervallel ∈ [− L 2 , L 2], alors les fonctions C et S définissent une base orthogonale <strong>de</strong> l’espace <strong>de</strong>s solutions<strong>de</strong> (38).Ce paramétrage présente toutefois un inconvénient : si le paramètre Υ définit la “courbure”du tube, il est bien difficile <strong>de</strong> donner un sens aux paramètres A et B. De plus l’écriture <strong>de</strong> lapositivé du rayon avec ce paramétrage est possible mais compliqué.Les fonctions√Υ ( )sinh( )l−LS l 2: (l,Υ) ↦→ − (sinh L √ )Υ√Υ ( )sinh( )l+LS r 2: (l,Υ) ↦→ (sinh L √ )Υ(44)définissent elles-aussi une base <strong>de</strong> l’espace <strong>de</strong>s solutions <strong>de</strong> (38). De plus, comme S l( −2) l = 1,S l( l2)= 0, Sr ( − l )2 = 0 et Sr ( l2)= 1, le rayon peut s’écrire˜R(l) = ˜R l S l (l, ˜Υ)+ ˜R r S r (l, ˜Υ) (45)où ˜R l est le rayon à l’extrémité gauche du tube et ˜R r le rayon à l’extrémité droite. Ce paramétrage,qui fait apparaître les rayons aux extrémités du profil, a un sens bien plus évi<strong>de</strong>nt quantà la géométrie du profil. La figure 8 présente l’influence <strong>de</strong> Υ sur les fonctions S l et S r . Unecourbure positive correspond donc à <strong>de</strong>s tubes convexes, une courbure nulle à <strong>de</strong>s tubes droitsou coniques et une courbure négative à <strong>de</strong>s tubes concaves. Avec ce paramétrage, un tronçon estentièrement défini par les paramètres (˜R l , ˜R r , ˜Υ).19
1.5Υ < 010.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.51Υ = 0S l/r (l,Υ)0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5S l (l,Υ)S r (l,Υ)1Υ > 00.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5l/LFigure 8 – Fonctions S l et S r pour Υ < 0 (en haut), Υ = 0 (au milieu) et Υ > 0 (en bas)Enfin, on définit les quantités suivantes afin <strong>de</strong> séparer les informations concernant la géométrieproprement dite et les informations concernant l’orientation du profil.( )Rrθ = ln(46)R lρ = √ R r R l (47)(48)Les paramètres R r et R l s’écrivent alorsR r = ρe θ 2 ,R l = ρe −θ 2 .(49)L’adimensionnement <strong>de</strong> ces différents paramétrages est donné en annexe.5.2 Profils physiquement réalistesConsidérons le tube défini, en variables adimensionnées, par le rayon R(x) = R l S l Υ (x) +R r S r Υ (x).L’étu<strong>de</strong> <strong>de</strong>s fonctions S l Υ et Sr Υ lorsque fait apparaître une singularité lorsque Υ = −π2 .Cette valeur est en fait la valeur critique évoquée en section 3 en variables adimensionnées (cequi revient à considérer L = 1). Pour cette valeur, les fonctions S l et S r ten<strong>de</strong>nt vers l’infini surl’intervalle [−1/2,1/2]. On en déduit le théorème suivantThéorème 5.1 (Valeur limite <strong>de</strong> Υ)[R(l) est définit ∀x ∈ − 1 2 , 1 ]⇒ Υ > Υ crit avec Υ crit = −π 2 (50)220
La suite <strong>de</strong> l’étu<strong>de</strong> suppose cette condition respectée.Nous l’avons déjà évoqué, la première condition pour que le tube soit physiquement réalisteest la positivité stricte du rayon.Théorème 5.2 (Positivité du rayon)R(x) > 0 ∀x ∈[− 1 2 , 1 ] {Rl > 0⇔2 R r > 0(51)Preuve 5.1 (Positivité du rayon)[R(x) > 0 ∀x ∈ − 1 2 , 1 ] { (R −1⇒2)> 02 R ( )1⇒2 > 0{Rl > 0R r > 0 ⇒ R(x) = R lS − (x) + R r S + (x) > 0 ∀x ∈[car S − (x) > 0 et S + (x) > 0 ∀x ∈ − 1 2 , 1 ]2{Rl > 0R r > 0[− 1 2 , 1 ]2La <strong>de</strong>scription <strong>de</strong> la perce en abscisse curviligne fait apparaître <strong>de</strong>s propriétés inhabituelles.En effet, une pente verticale correspond à R ′ (l) = 1, on a donc la condition suivante :∣ R ′ (l) ∣ ∣ ≤ 1 (52)Cette inégalité ne nous a pas encore mené à <strong>de</strong>s conditions convaincantes et n’est pas exploitéepour l’instant.6 Résolution du modèle et diagonalisation <strong>de</strong> la matrice <strong>de</strong> transfertacoustique6.1 Résolution du modèle <strong>de</strong> Webster-Lokshin à abscisse curviligneLa résolution <strong>de</strong> (20-21) sous forme <strong>de</strong> matrice <strong>de</strong> transfert est donnée dans [1] et peut s’écriresous la formeoù[˜Pr (˜s)Ũ r (˜s)]=⎡⎢⎣L˜R r00 − π˜R rρ˜s⎤⎡⎥⎦ ˜Q r,l (˜s) ⎢⎣˜R lL0⎤[ ]0⎥ ˜Pl (˜s)ρ˜s ⎦ Ũ l (˜s)π˜R l[][1, σ l ]∆(˜s) [0,−1]∆(˜s)˜Q(˜s) =[−(σ l +σ r ), −σ r σ l −L 2˜Γ(˜s) 2 ] ∆(˜s) [1, σ r ]∆(˜s)⎡avec ∆(˜s) = ⎣ φ 1(L 2˜Γ(˜s) 2 ) ⎤(φ 2 L 2˜Γ(˜s) 2 ) ⎦En variables adimensionnées, la matrice <strong>de</strong> transfert <strong>de</strong>vient⎡ ⎤[ ] 1Pr (s)0 [⎢= ⎣R rU r (s)0 − 1⎥ Rl 0⎦Q(s)0 R l sR r s21][Pl (s)U l (s)](53)(54)(55)
oùQ(s) =[][[1, σ l ]∆(s) [0,−1]∆(s)−(σ l +σ r ), −σ r σ l −Γ(s) 2] ∆(s) [1, σ r ]∆(s)[ (φ1 Γ(s)2 ) ] (56)avec ∆(s) = (φ 2 Γ(s)2 )Les paramètres σ l , σ r et Υ sont liés. En effet, en écrivant la définition <strong>de</strong> σ l et <strong>de</strong> σ r , onmontre queσ r +σ l = −(σ r σ l +Υ) φ 2(Υ)φ 1 (Υ) . (57)On peut donc réécrire la matrice Q(s) afin <strong>de</strong> séparer les effets <strong>de</strong>s paramètres σ l et σ r :Q(s) = Q 0 (s) + σ l Q l (s) + σ r Q r (s),[][1, 0]∆(s) [0, −1]∆(s)Q 0 (s) =[0, Υ−Γ(s) 2] ,∆(s) [1, 0]∆(s)[ ][0, 1]∆(s) 0Q l (s) =,[−1, Φ(Υ)]∆(s) 0[]0 0Q r (s) =.[−1, Φ(Υ)]∆(s) [0, 1]∆(s)(58)6.2 Recherche d’on<strong>de</strong>s découpléesDans cette section, la dépendance en la variable <strong>de</strong> Laplace s est omise afin d’alléger lesnotations.6.2.1 Démarche adoptéeComme nous l’avons dit en introduction <strong>de</strong> cette partie, le but est ici <strong>de</strong> trouver <strong>de</strong>s on<strong>de</strong>sprogressives découplées informées par la géométrie. Pour cela, il nous faut injecter la condition(51) dans (58) avant la diagonalisation.Ceci est fait via le paramètre <strong>de</strong> dissymétrie θ. En effet, la condition (51) implique la réalité <strong>de</strong>cette quantité. De plus, ce rapport nous permet <strong>de</strong> distinguer les informations liée à la géométrieet celles liées à l’orientation : le signe <strong>de</strong> θ nous indique l’orientation du tube alors que |θ| (ou θ 2 )nous donne une information sur le “taux <strong>de</strong> dissymétrie”, invariant par changement d’orientation.Pour bien comprendre cette étape, il est nécessaire <strong>de</strong> se <strong>de</strong>man<strong>de</strong>r à quoi correspond physiquementla diagonalisation <strong>de</strong> la matrice Q. Comme l’indique (55), la matrice Q est la matrice <strong>de</strong>transfert acoustique entre les états acoustiques aux extrémités du tubes. Cet état acoustique estun vecteur contenant la pression normalisée par la longueur du tronçon et la dérivée temporelled’une quantité <strong>de</strong> mouvement.Par définition, la diagonalisation d’une matrice M revient à trouver les valeurs propres λpour lesquels∃X ≠ 0 / MX = λX.Dans notre cas, diagonaliser Q revient donc à chercher une “proportion” <strong>de</strong> P et <strong>de</strong> U qui sepréserve lorsqu’elle parcourt le tronçon <strong>de</strong> tube :( ( 1X = λX −2)1 )222
6.2.2 Recherche <strong>de</strong>s valeurs propresOn posePar définition,F(θ,Υ) = φ 1(θ 2 )−φ 1 (Υ)φ 2 (Υ)⎧⎪ ⎨⎪ ⎩σ l = √ Υσ r = √ Υ( √Υ )R r −R l cosh( √Υ ) ,R l sinh( √Υ )R l −R r cosh( √Υ ) .R r sinh(59)(60)On en déduit ⎧⎪ ⎨⎪ ⎩σ l =σ r =e θsinh(θ)−Φ(Υ) = F(θ,Υ)+φ 2 (Υ) φ 2 (Υ) ,e −θ(61)sinh(θ)−Φ(Υ) = F(θ,Υ)−φ 2 (Υ) φ 2 (Υ) .En injectant (61) dans (58), on obtient une nouvelle expression <strong>de</strong> la matrice Q(s), uniquementen fonction <strong>de</strong>s paramètres θ et Υ.(Q 1,1 = φ 1 Γ2 ) (+ F(θ,Υ)+ sinh(θ) )(φ 2 Γ2 )( φ 2 (Υ)Q 1,2 = −φ 2 Γ2 )(Q 2,1 = −2F(θ,Υ)φ 1 Γ2 ) ( (sinh(θ) ) )2+ −F(θ,Υ) 2 −Γ 2 (φ 2 Γ2 )φ 2 (Υ)(Q 2,2 = φ 1 Γ2 ) (+ F(θ,Υ)− sinh(θ)φ 2 (Υ)On vérifie bien que l’on a encoreLe polynôme caractéristique associé à cette matrice est)φ 2(Γ2 ) (62)<strong>de</strong>t(Q) = 1 (63)P(λ) = λ 2 −2b ′ λ+1 (64)avec b ′ = φ 1(Γ2 ) +F(θ,Υ)φ 2(Γ2 ) (65)et les valeurs propres <strong>de</strong> la matrice <strong>de</strong> transfert acoustique s’écrivent⎛ √ ⎞λ r = b ′ b⎝1−′2 −1⎠b ′ 2et⎛ √ ⎞λ l = b ′ b⎝1+′2 −1⎠b ′ 2.(66)Comme <strong>de</strong>tQ = 1, on sait que λ l = λ −1 r . On notera par la suite λ = λ r . Il existe un matrice <strong>de</strong>passage P telle que[ ] λ 0Q = P0 λ −1 P −1 . (67)23
Ces valeurs propres et la matrice <strong>de</strong> passage qui leur est associée définissent un nouveau typed’on<strong>de</strong>s progressives découplées qui se propagent à l’intérieur d’un tube acoustique à Υ constantavec prise en compte <strong>de</strong>s pertes visco-thermique.La diagonalisation <strong>de</strong> la matrice <strong>de</strong> transfert acoustique s’écrit donc :⎡]⎢= ⎣U r[Pr1R r00 − 1R r s⎤⎥⎦P6.2.3 Paramétrisation <strong>de</strong>s espaces propres[ ] [ λ 00 λ −1 P −1 Rl 00 R l s][PlU l](68)Pour trouver les vecteurs propres associés à chaque valeur propre, on résout[ ] [ ]ul/r ul/rQ = λv l/rl/r v l/r(69)Comme la diagonalisation fait apparaître <strong>de</strong>ux valeurs propres <strong>de</strong> multiplicité 1, la matrice <strong>de</strong>passage possè<strong>de</strong> <strong>de</strong>ux <strong>de</strong>grés <strong>de</strong> liberté que l’on note α et β. En définissant√b′K = (φ ) b ′2 −12 Γ2b ′ 2et (70)a = sinh(θ)φ 2 (Υ) , (71)on obtient la matrice <strong>de</strong> passageP =[α βα(a−K) β(a+K)](72)et son inverse⎡P −1 = 1 ⎣2αβK(K +a)β −β(K −a)α α⎤⎦ . (73)Nous avons donc trouvé un paramétrage <strong>de</strong> la matrice <strong>de</strong> passage liée aux valeurs propresdéfinies ci-<strong>de</strong>ssus.Maintenant que nous connaissons l’expression <strong>de</strong>s matrices <strong>de</strong> passage, l’équation <strong>de</strong> transfert(68) peut être mise sous la forme d’une succession <strong>de</strong> quadripôles. Cette décomposition estprésentée en figure 9 (à gauche) en convention admittance (pression en entrée, débit en sortie).Nous souhaitons obtenir une struture symétrique. Remarquons tout d’abord que lorsque l’onchange l’orientation, a <strong>de</strong>vient −a, on note donc a l = a et a r = −a. Comme le changementd’orientation doit se traduire uniquement par l’inversion <strong>de</strong>s indices . l et . r , il apparaît unecondition sur les <strong>de</strong>grés <strong>de</strong> libertés <strong>de</strong> notre décomposition : α et β. En effet, on observe que lasymétrie est retrouvée dans le cas où le changement d’orientation change α en β et inversement.En notant α l = α et α r = β, on retrouve bien un structure entièrement symétrique (9 à droite).Un travail reste à faire sur le choix <strong>de</strong>s quantités α l et α r . Nous pouvons citer comme possibilités<strong>de</strong> choix respectant la symétrie :– α l = α r– α l = R l et α r = R r– α l = R r et α r = R l24
PlUlRl1/RlsPlUlPlUl1/αa−K −β/α2βKRlαa−Ks − β α2βKRlsRlαlal−K− αrsαl2αrKRlsλλλλλλ−2αK−α/β a+K1/β2αKRrs− α β−a−KsRrβ2αlKRrs− α lαrar−KsRrαrUrPrUrPr1/Rr−RrsUrPrFigure 9 – Décomposition en quadripôles <strong>de</strong> transfert. Rappelons que le but <strong>de</strong> l’étu<strong>de</strong> est,entre autres, <strong>de</strong> retrouver <strong>de</strong>s fonctions stables dans la boucle interne. Les trois représentationssont équivalentes avec a l = a, a r = a, α l = α et β r = β.25
6.3 Etu<strong>de</strong>s et interprétation <strong>de</strong>s valeurs propresL’expression (68) fait apparaître les nouveaux opérateurs <strong>de</strong> propagation (voir aussi la figure9), il s’agit simplement <strong>de</strong> la valeur propre λ. Etudions quelques propriétés <strong>de</strong> ce “nouvelopérateur” <strong>de</strong> propagation.Cas <strong>de</strong>s tubes droits Etudions en premier lieu le cas Υ = 0 et θ = 0 (tube droit). Dans cecas, on trouveb ′ = φ 1(Γ2 ) (74)λ = φ 1(Γ2 ) −Γφ 2(Γ2 ) = e −Γ (75)On retrouve bien les mêmes opérateurs <strong>de</strong> propagation et <strong>de</strong> dispersion qu’en section 1 (enprenant ε = 0, on obtient Γ(s) = √ s 2 qui vaut s sur C + 0 en choisissant la fonction racine coupéesur R − ).Première étu<strong>de</strong> la fonction F D’après (64-66), on montre aisément que l’on retrouve l’opérateur<strong>de</strong> propagation e −Γ si F(θ,Υ) = 0. De plus, notons que la valeur <strong>de</strong> F(θ,Υ) ne dépendpas du signe <strong>de</strong> θ mais uniquement <strong>de</strong> θ 2 . On se place donc maintenant dans le cas θ ≥ 0 (lechoix du signe <strong>de</strong> θ revient simplement à un choix d’orientation du tronçon). Ceci nous permet<strong>de</strong> faire une première cartographie <strong>de</strong>s différentes géométries selon les valeurs <strong>de</strong> θ 2 et Υ.Υ −π 2 0 +∞θ 2 < Υ X X Géométrie <strong>de</strong> type Cθ 2 = Υ X Tube droit Géométrie <strong>de</strong> type exponentielθ 2 > Υ Tube convexe Tube conique Géométrie <strong>de</strong> type STable 1 – Catégorisation géométrique en fonction <strong>de</strong> θ et ΥLes différentes géométries <strong>de</strong>s tubes évasés (ou tubes convexes, i.e. Υ > 0) sont présentéesen figure 10. Les 3 tubes représentés sont définis entre 0 et L = 1 mais les rayons sont tracésau-<strong>de</strong>là <strong>de</strong> ces valeurs afin d’illustrer les propriétés <strong>de</strong> chaque type géométrique.La géométrie <strong>de</strong> type C correspond au cas θ 2 < Υ. Ces profils peuvent s’écrire sous la formeCcosh(al+b) (le calcul n’est pas détaillé ici). On constate sur la figure 10 l’abscence <strong>de</strong> passagepar 0 du rayon dans ce cas. La géométrie <strong>de</strong> type S correspond au cas θ 2 > Υ. Ces profils peuvents’écrire sous la forme Ssinh(al+b) (le calcul n’est pas détaillé ici). On constate sur la figure 10un changement <strong>de</strong> signe du rayon (en l 0 < 0). Enfin, la géométrie <strong>de</strong> type exponentiel correspondau cas θ 2 = Υ. On montre dans ce cas que le profil peut s’écrire sous la forme Ee al+b (le calculn’est pas détaillé ici).Cette première catégorisation <strong>de</strong> profil peut être tracée dans le plan ayant pour axes Υ et θ 2 ,voir figure 11.Etudions les évolutions <strong>de</strong>s diagrammes <strong>de</strong> Bo<strong>de</strong> du nouvel opérateur <strong>de</strong> propagation enfonction <strong>de</strong>s paramètres Υ et θ. Les figures 12 à 14 présentent les diagrammes <strong>de</strong> Bo<strong>de</strong> <strong>de</strong>l’opérateur <strong>de</strong> propagation pour un tube concave, un tube cônique, un tube à géométrie <strong>de</strong> typeS, un tube à géométrie <strong>de</strong> type exponentiel et un tube à géométrie <strong>de</strong> type C.Nous pouvons retrouver <strong>de</strong> nombreuses informations intéressantes dans ces courbes. Premièrement,on constate l’apparition <strong>de</strong> “mo<strong>de</strong>s en creux” ou “mo<strong>de</strong>s non transportés” dans lemodule <strong>de</strong> l’opérateur <strong>de</strong> propagation. Ces mo<strong>de</strong>s, propres au tronçon, sont à vrai dire plus <strong>de</strong>s“germes <strong>de</strong> mo<strong>de</strong>s” que <strong>de</strong>s mo<strong>de</strong>s proprement dits. En effet, l’effet général <strong>de</strong> ces mo<strong>de</strong>s seraprofondément modifié lorsque le tronçon sera connecté à un autre tronçon ou à une impédance26
Exemple <strong>de</strong> géométrie <strong>de</strong> type CR(l) et −R(l)R(l) et −R(l)R(l) et −R(l)10−1−1 −0.5 0 0.5 1 1.550−540200−20lExemple <strong>de</strong> géométrie <strong>de</strong> type exponentiel−1 −0.5 0 0.5 1 1.5lExemple <strong>de</strong> géométrie <strong>de</strong> type S−40−1 −0.5 0 0.5 1 1.5Figure 10 – 3 types <strong>de</strong> tubes évasésl<strong>de</strong> rayonnement par exemple. Autre exemple, si on connecte <strong>de</strong> façon C 1 ce tronçon à un autretronçon ayant le même paramètre Υ et la même longueur, on obtient un tronçon ayant commelongueur la somme <strong>de</strong>s <strong>de</strong>ux longueurs originales et le même paramètre Υ. On <strong>de</strong>vrait doncretrouver le même diagramme <strong>de</strong> Bo<strong>de</strong> avec un mo<strong>de</strong> sur <strong>de</strong>ux (cela n’a pas encore été vérifié).Nous reparleront <strong>de</strong> ces mo<strong>de</strong>s un peu plus loin.Par ailleurs, on remarque que, dans le cas <strong>de</strong>s géométries <strong>de</strong> type exponentiel, les mo<strong>de</strong>s encreux présents dans le module <strong>de</strong> l’opérateur <strong>de</strong> propagation disparaissent, on retrouve λ = e Γ(qui est stable car Υ > 0).27
ΥTubes symétriquesGéométrie <strong>de</strong> type exponentielGéométrie <strong>de</strong> type CTubes droitsGéométrie <strong>de</strong> type STubes côniques− π24Tubes concavesθ 2Tubes concaves−π 2Figure 11 – Catégorisation <strong>de</strong>s différentes géométries <strong>de</strong> tubeCommentaires généraux sur les tubes à section variable Nous avons étudié les valeurspropres et les opérateurs <strong>de</strong> propagation qui ont été trouvés dans cette étu<strong>de</strong>. Afin <strong>de</strong> présenterles opérateurs <strong>de</strong> dispersion, les pages suivantes présentent une série <strong>de</strong> courbes qui permettent<strong>de</strong> comparer l’opérateur <strong>de</strong> dispersion D(s) (26) précé<strong>de</strong>mment utilisé avec le nouvel opérateur<strong>de</strong> dispersion déduit <strong>de</strong>s valeurs propres que nous avons trouvé :D n (s) = e s λ(s). (76)Les pages suivantes présentent le tracé du rayon, les modules et phases <strong>de</strong> D(s) dans ledomaine <strong>de</strong> Laplace et les modules et phases <strong>de</strong> D n (s) dans le domaine <strong>de</strong> Laplace pour plusieursjeux <strong>de</strong> paramètres Υ, θ et ε.Sur chaque double page, les figures sont présentés comme suit– De gauche à droite : Υ = 10, 1, 0, −1, −5.– De haut en bas : rayon du tronçon, module <strong>de</strong> D(s), phase <strong>de</strong> D(s), module <strong>de</strong> D n (s),phase <strong>de</strong> D n (s).Les doubles pages sont présentées dans cet ordre :– ε = 0, Rr/Rl = 1,– ε = 0, Rr/Rl = 2,– ε = 0, Rr/Rl = 10,– ε = 0.1, Rr/Rl = 1,– ε = 0.1, Rr/Rl = 2,– ε = 0.1, Rr/Rl = 10.Les co<strong>de</strong>s couleurs sont les suivants :– Pour les modules, l’échelle va <strong>de</strong> 0 à 2, du bleu foncé au rouge. Tout ce qui est supérieurà 2 est rouge foncé. Cette coloration ne permet pas <strong>de</strong> différencier les pics d’amplitu<strong>de</strong>28
Υ = −4, θ = 1, R l = 0.1, ε = 0 Υ = 0, θ = 1, R l = 0.1, ε = 00.450.30.40.280.260.350.24R(l)0.30.25R(l)0.220.20.180.20.160.140.150.120.1−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50l0.1−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50l−1−1−2−2−3−3|λ(iω)|−4−5|λ(iω)|−4−5−6−6−7−7−8−8−9ω−15 −10 −5 0 5 10 15−9ω−15 −10 −5 0 5 10 15443322arg(λ(iω))10−1arg(λ(iω))10−1−2−2−3−3−4ω−15 −10 −5 0 5 10 15−4ω−15 −10 −5 0 5 10 15Figure 12 – Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, tube concave (à gauche) ettube conique (à droite)supérieur à 2 mais en revanche, elle est très adaptée pour repérer le passage au-<strong>de</strong>ssus ouen-<strong>de</strong>ssous <strong>de</strong> 1.– Pour les phases, l’échelle est circulaire : les couleurs correspondantes à −π et π sont rouges.Les couleurs se déroulent ensuite en passant par le bleu clair pour une phase nulle.29
Υ = 2, θ = 2, R l = 0.1, ε = 0 Υ = 4, θ = 2, R l = 0.1, ε = 00.80.80.70.70.60.6R(l)0.50.4R(l)0.50.40.30.30.20.20.1−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50l0.1−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50l−2−2−4−4−6−6|λ(iω)|−8−10|λ(iω)|−8−10−12−12−14−14−16−16−18ω−15 −10 −5 0 5 10 15−18ω−15 −10 −5 0 5 10 15443322arg(λ(iω))10−1arg(λ(iω))10−1−2−2−3−3−4ω−15 −10 −5 0 5 10 15−4ω−15 −10 −5 0 5 10 15Figure 13 – Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, géométrie <strong>de</strong> type S (à gauche)et géométrie <strong>de</strong> type exponentiel (à droite)30
Υ = 4, θ = 1, R l = 0.1, ε = 00.280.260.240.22R(l)0.20.180.160.140.120.10.08−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50l−1−2−3|λ(iω)|−4−5−6−7−8−9ω−15 −10 −5 0 5 10 15432arg(λ(iω))10−1−2−3−4ω−15 −10 −5 0 5 10 15Figure 14 – Diagramme <strong>de</strong>s Bo<strong>de</strong> <strong>de</strong>s opérateurs <strong>de</strong> propagation, géométrie <strong>de</strong> type C31
(θ = 0,ε = 0) Υ = 10 Υ = 1 Υ = 00.250.250.250.20.20.20.150.150.150.10.10.10.050.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 332
Υ = −1Υ = −50.250.250.20.20.150.150.10.10.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 333
(θ = ln(2),ε = 0) Υ = 10 Υ = 1 Υ = 00.350.350.350.30.30.30.250.250.250.20.20.20.150.150.150.10.10.10.050.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 334
Υ = −1Υ = −50.350.350.30.30.250.250.20.20.150.150.10.10.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 335
(θ = ln(10),ε = 0) Υ = 10 Υ = 1 Υ = 01.41.41.41.21.21.21110.80.80.80.60.60.60.40.40.40.20.20.20−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 336
Υ = −1Υ = −51.41.41.21.2110.80.80.60.60.40.40.20.20−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 337
(θ = 0,ε = 0.1) Υ = 10 Υ = 1 Υ = 00.250.250.250.20.20.20.150.150.150.10.10.10.050.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 338
Υ = −1Υ = −50.250.250.20.20.150.150.10.10.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 339
(θ = ln(2),ε = 0.1) Υ = 10 Υ = 1 Υ = 00.350.350.350.30.30.30.250.250.250.20.20.20.150.150.150.10.10.10.050.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 340
Υ = −1Υ = −50.350.350.30.30.250.250.20.20.150.150.10.10.050.050−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 341
(θ = ln(10),ε = 0.1) Υ = 10 Υ = 1 Υ = 01.41.41.41.21.21.21110.80.80.80.60.60.60.40.40.40.20.20.20−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151515101010555000−5−5−5−10−10−10−15−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 342
Υ = −1Υ = −51.41.41.21.2110.80.80.60.60.40.40.20.20−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 3151510105500−5−5−10−10−15−15−3 −2 −1 0 1 2 3−3 −2 −1 0 1 2 343
Ces nombreuses figures nous donnent <strong>de</strong> précieux renseignements sur l’intérêt <strong>de</strong>s propagateursque nous avons trouvé. Rappelons qu’en raison <strong>de</strong> la présence <strong>de</strong> racine complexe, nousnous bornons pour l’instant à considérer les fonctions sur le <strong>de</strong>mi-plan droit <strong>de</strong> Laplace. Uneétu<strong>de</strong> plus approfondie permettrait <strong>de</strong> tirer <strong>de</strong> nombreuses informations <strong>de</strong> la partie <strong>de</strong>s courbessur C − 0 .En premier lieu, il est bon <strong>de</strong> souligner que, dans le cas <strong>de</strong>s tubes droits (avec ou sans pertes),nous retrouvons l’opérateur <strong>de</strong> dissipation unitaire définit en section 1.Ensuite, ces figures nous prouvent qu’il n’est pas absur<strong>de</strong> <strong>de</strong> définir comme opérateur <strong>de</strong>dispersion D n (s) = e s λ(s). En effet, l’absence <strong>de</strong> déroulement <strong>de</strong> phase sur la partie droite <strong>de</strong>stracé <strong>de</strong> phase <strong>de</strong> D n (s) prouvent que ces opérateurs <strong>de</strong> contiennent pas <strong>de</strong> retard. On en concluedonc que λ(s) contient un retard e −s , il s’agit bien d’un opérateur <strong>de</strong> propagation, au sens ou ilest constitué d’un retard et d’un opérateur <strong>de</strong> dispersion (sans retard).Plus important, nous pouvons remarquer que les nouveaux opérateurs <strong>de</strong> dispersion (ou <strong>de</strong>propagation) ont, dans tous les cas, l’heureuse propriété d’avoir un module inférieur à 1. Ainsi, lespropagateurs en eux-mêmes sont stables, contrairement aux propagateurs initiaux qui présententun pôle très important dans C + 0 . On remarque aussi que les coupures sur la partie positive <strong>de</strong>l’axe réel dans les diagrammes <strong>de</strong> phase <strong>de</strong> e s−Γ(s) dûes aux changements <strong>de</strong> signe successif durayon quand Υ < 0 ont bien été éliminées avec les nouveaux opérateurs. Ce résultat en soit estdéjà un très grand progrès dans la décomposition en on<strong>de</strong>s découplées, il nous assure la stabilitélors du transport. De plus, nous pouvons observer sur la figure 9 que le gain <strong>de</strong> la boucle interneest égal à λ 2 . La boucle interne est donc elle aussi stable.Enfin, on remarque une structure <strong>de</strong> mo<strong>de</strong>s non transportés (module plus petit que 1), notammentpour les valeurs <strong>de</strong> |Υ| gran<strong>de</strong>s. Ces mo<strong>de</strong>s, dûs probablement à la finitu<strong>de</strong> du tronçonnous assurent que l’information géométrique (finitu<strong>de</strong> du tronçon et positivité du rayon) a bienété transmise dans la matrice <strong>de</strong> transfert acoustique.Les figures 15 présentent l’évolution <strong>de</strong>s diagrammes <strong>de</strong> Bo<strong>de</strong> (module à gauche, phase àdroite, même co<strong>de</strong> couleur que précé<strong>de</strong>mment) <strong>de</strong> λ(s) en fonction <strong>de</strong> la valeur <strong>de</strong> Υ. Sur uneimage, chaque ligne correspond à un diagramme <strong>de</strong> Bo<strong>de</strong> (avec la pulsation ω en abscisse) et laposition en ordonnée indique la valeur du paramètre Υ.Etudions d’abord le premier cas : θ 2 =0, géométrie parfaitement symétrique. Le cas Υ=θ 2 =0correspond au tube droit donc le propagateur est un retard pur, le module vaut 1. Au <strong>de</strong>ssous,(courbure négative), le module est plus petit que 1 et finit par être complètement nul quandon atteint le cas limite Υ = −π 2 . Cela s’interprète <strong>de</strong> la façon suivante. Quand Υ = 0, noussommes dans le cas d’un tube droit, tout se propage. Quand Υ=−π 2 , le tube concave <strong>de</strong>vientfermé et rien ne se propage, tout est mo<strong>de</strong>, les propagateurs sont nuls. Tout est mo<strong>de</strong> parce que,précisément, Υ=−π 2 est le seul cas (limite) où on a <strong>de</strong>s vrais conditions frontière : il correspondà un tronçon fermé. On retrouve cette <strong>de</strong>rnière propriété sur l’autre figure qui correspond àun tube dissymétrique. Pour un tube dissymétrique, les basses fréquences ne se propagent pas,même dans le cas <strong>de</strong>s tubes exponentiels (cas Υ=θ 2 ). Pour un tube dissymétrique qui n’est pasexponentiel, <strong>de</strong>s mo<strong>de</strong>s sont retenus, pour Υ>0 et Υ
60|λ(s)|60arg ( λ(s) )505040403030ΥΥ202010100060ω−3 −2 −1 0 1 2 3|λ(s)|60ωarg ( λ(s) )−3 −2 −1 0 1 2 3505040403030ΥΥ2020101000ω−3 −2 −1 0 1 2 3ω−3 −2 −1 0 1 2 3Figure 15 – Ces figures présentent l’évolution du diagramme <strong>de</strong> Bo<strong>de</strong> (module à gauche, phaseà droite, même co<strong>de</strong> couleur que précé<strong>de</strong>mment) <strong>de</strong> λ(s) en fonction du paramètre Υ. Dans tousles cas, ε = 0. Dans la première ligne, la ligne rouge représente la valeur Υ = θ 2 = 0, dans la<strong>de</strong>uxième ligne, la ligne rouge représente la valeur Υ = θ 2 = 16.45
Conclusion et perspectivesNous avons réussi pendant ce <strong>stage</strong> à mettre à jour un nouveau type d’on<strong>de</strong>s découplées.Ces on<strong>de</strong>s intègrent une condition géométrique <strong>de</strong> réalisabilité du tube : la positivité stricte durayon. Ainsi, nous pensons pouvoir supprimer le problème existant précé<strong>de</strong>mment lié à <strong>de</strong>s changements<strong>de</strong> signe virtuels du tube dans les fonctions <strong>de</strong> réflexions internes. Un premier résultatnous confirme que les propagateurs trouvés sont intéressants car, contrairement aux propagateursprécé<strong>de</strong>nts, ils sont stables quelques soient les valeurs <strong>de</strong>s paramètres θ et Υ.Il reste cependant <strong>de</strong> nombreux points à approfondir.Premièrement, l’interprétation <strong>de</strong>s nouveaux propagateurs n’est pas encore très claire et unerecherche approfondie dans ce sens sera nécessaire pour continuer le processus <strong>de</strong> compréhension<strong>de</strong>s phénomènes physiques mis en jeu.Au <strong>de</strong>là <strong>de</strong> la compréhension physique, l’étu<strong>de</strong> est loin d’être finie. Nous avons mis en oeuvreune famille <strong>de</strong> matrices <strong>de</strong> transfert paramétrées par <strong>de</strong>ux <strong>de</strong>grés <strong>de</strong> liberté et il sera nécessaired’étudier ces paramètres afin <strong>de</strong> retrouver, d’une part, une expression <strong>de</strong> matrice <strong>de</strong> transfertsymétrique par changement d’orientation du tube, et d’autre part, d’étudier la stabilité et lapassivité <strong>de</strong>s fonctions <strong>de</strong> réflexions internes [23, 24]. Car la stabilité <strong>de</strong>s propagateurs n’impliquepas forcément la stabilité <strong>de</strong>s fonctions <strong>de</strong> réflexions internes.Une fois la stabilité et la passivité <strong>de</strong>s fonctions <strong>de</strong> réflexions internes assurées, il resteraplusieurs étapes avant d’arriver à une véritable structure gui<strong>de</strong>s d’on<strong>de</strong>s stables et simulable àfaible coût.La première consiste en l’approximation <strong>de</strong>s différentes fonctions <strong>de</strong> transfert qui contiennent<strong>de</strong>s coupures (continuum <strong>de</strong> pôles) en fonctions contenant un ensemble fini <strong>de</strong> pôles (représentationsintégrales) comme cela a déjà été fait dans [1, 6]. La <strong>de</strong>uxième consiste en la discrétisationdu système complet nécessaire pour la simulation temps-réel.Plusieurs <strong>de</strong> ces étapes faisaient partie <strong>de</strong> mes objectifs initiaux pour ce <strong>stage</strong> et je n’ai malheureusementpas encore eu la possibilité <strong>de</strong> mener ces étu<strong>de</strong>s à terme. J’ai passé du temps surune première étu<strong>de</strong> <strong>de</strong> la paramétrisation <strong>de</strong>s fonctions <strong>de</strong> réflexions internes définies initialementqui n’a malheureusement pas abouti et je me suis finalement dirigé vers la solution <strong>de</strong> ladiagonalisation <strong>de</strong> la matrice Q. Les premiers résultats trouvés sur les propagateurs sont plutôtencourageants et j’ai bon espoir que ces travaux servent <strong>de</strong> point <strong>de</strong> départ à une rechercheapprofondie qui permettra enfin <strong>de</strong> trouver une solution <strong>de</strong> simulation stable à faible coût <strong>de</strong>stubes acoustiques basée sur le modèle <strong>de</strong> Webster-Lokshin à abscisse curviligne quelque soit lagéométrie du tube à simuler.46
Références[1] Thomas Hélie. Modélisation physique d’instruments <strong>de</strong> musique en systèmes dynamiques etinversion. Thèse <strong>de</strong> doctorat, Université <strong>de</strong> Paris XI - Orsay, Paris, 2002.[2] J. O. Smith. Physical mo<strong>de</strong>ling synthesis update. Computer Music Journal, 20(2) :44–56,1996. MIT Press.[3] J.L. Kelly and Lochbaum C.C. Speech synthesis. In Proc. 4th Int. Cong. Acoust., pages1–4, 1962.[4] G. P. Scavone. An Acoustic Analysis of Single-Reed Woodwind Instruments with an Emphasison Design and Performance Issues and Digital Wavegui<strong>de</strong> Mo<strong>de</strong>ling Techniques. PhD thesis,Music Dept., Stanford University, 1997.[5] Th. Hélie, R. Mignot, and D. Matignon. Wavegui<strong>de</strong> mo<strong>de</strong>ling of lossy flared acoustic pipes :Derivation of a Kelly-Lochbaum structure for real-time simulations. In IEEE WASPAA,pages 267–270, Mohonk, USA, 2007.[6] Rémi Mignot. Réalisation en gui<strong>de</strong>s d’on<strong>de</strong>s numériques stables d’un modèle acoustiqueréaliste pour la simulation en temps-réel d’instruments à vent. Thèse <strong>de</strong> doctorat, Edite <strong>de</strong>Paris - Telecom ParisTech, Paris, 2009.[7] Thomas Hélie, Thomas Hézard, and Rémi Mignot. Représentation géométrique optimale <strong>de</strong>la perce <strong>de</strong> cuivres pour la calcul d’impédance d’entrée et <strong>de</strong> transmittance, et pour l’ai<strong>de</strong>à la lutherie. In Actes du 10ème Congrès Français d’Acoustique, 2010.[8] D. P. Berners. Acoustics and signal processing techniques for physical mo<strong>de</strong>ling of brassinstruments. PhD thesis, Standford University, 1999.[9] E. Ducasse. Modélisation et simulation dans le domaine temporel d’instruments à vent àanche simple en situation <strong>de</strong> jeu : métho<strong>de</strong>s et modès. PhD thesis, Université du Maine,2001.[10] E. Ducasse. An alternative to the traveling-wave approach for use in two-port <strong>de</strong>scriptionsof acoustic bores. J. Acoust. Soc. Am., 112 :3031–3041, 2002.[11] J. Gilbert, J. Kergomard, and J. D. Polack. On the reflection functions associated withdiscontinuities in conical bores. J. Acoust. Soc. Am., 04, 1990.[12] Rémi Mignot, Thomas Hélie, and Denis Matignon. Stable realization of a <strong>de</strong>lay system mo<strong>de</strong>linga convergent acoustic cone. In Mediterranean Conference on Control and Automation,pages 1574–1579, Ajaccio, France, 2008.[13] J. L. Lagrange. Nouvelles recherches sur la nature et la propagation du son. Misc. Taurinensia(Mélanges Phil. Math., Soc. Roy. Turin), 1760-1761.[14] D. Bernoulli. Sur le son et sur les tons <strong>de</strong>s tuyaux d’orgues différemment construits. Mém.Acad. Sci. (Paris), 1764.[15] A. G. Webster. Acoustical impedance, and the theory of horns and of the phonograph. Proc.Nat. Acad. Sci. U.S., 5 :275–282, 1919. Errata, ibid. 6, p.320 (1920).[16] E. Eisner. Complete solutions of the Webster horn equation. J. Acoust. Soc. Amer.,41(4) :1126–1146, 1967.[17] G. Kirchhoff. Ueber die einfluss <strong>de</strong>r wärmeleitung in einem gase auf die schallbewegung. Annalen<strong>de</strong>r Physik Leipzig, 134, 1868. (English version : R. B. Lindsay, ed., PhysicalAcoustics,Dow<strong>de</strong>n, Hutchinson and Ross, Stroudsburg, 1974).[18] A. Chaigne and J. Kergomard. Acoustique <strong>de</strong>s instruments <strong>de</strong> musique. Belin, 2008.[19] T. Hélie. Unidimensional mo<strong>de</strong>ls of acoustic propagation in axisymmetric wavegui<strong>de</strong>s. J.Acoust. Soc. Am., 114 :2633–2647, 2003.47
[20] H. Haddar, Th. Hélie, and D. Matignon. A webster-lokshin mo<strong>de</strong>l for waves with viscothermallosses and impedance boundary conditions : strong solutions. pages 66–71, 2003.[21] D. Matignon. Asymptotic stability of the Webster-Lokshin mo<strong>de</strong>l. In Mathematical Theoryof Networks and Systems (MTNS), pages 11 p. CD–Rom, Kyoto, Japan, jul 2006. (invitedsession).[22] Thomas Hézard. Construction <strong>de</strong> famille d’instruments à vent virtuels. Projet <strong>de</strong> fin d’étu<strong>de</strong>sd’ingénieur, Ecole Nationale Supérieure <strong>de</strong> l’Electronique et <strong>de</strong> ses Applications, Cergy-Pontoise, 2009.[23] S. Bilbao. Waves and Scattering Methods for Numerical Simulation. John Wiley and Sons,2004.[24] Alfred Fettweis. Wave digital filters : Theory and practice. In Proc. of the IEEE, volume 74,pages 270 – 327, 1986.48
AnnexeSont présentés ici les nombreux calculs effectués pendant ce travail <strong>de</strong> <strong>stage</strong> à partir <strong>de</strong>stravaux présentés dans la thèse <strong>de</strong> Rémi Mignot. Ces différentes expressions ont été obtenues dansle cadre <strong>de</strong> plusieurs pistes explorées pour la résolution du problème posé. Un grand nombre <strong>de</strong>ces pistes ont été infructueuses et n’ont pas été présentées dans le présent document. Néanmoins,nous tenons à intégrer ces expressions dans ce document car elles pourront être utilisées dans lacontinuité <strong>de</strong> ces travaux.1 Algèbre généraleX + 1 (s)T + (s)X + 2 (s)R l (s)R r (s)X − 1 (s)T − (s)X − 2 (s)Figure 1–Quadripôle[ X−1X + 2]=[A11 A 12A 21 A 22][ X+1X − 2],[ X+2X − 2]=[B11 B 12B 21 B 22][ X+1X − 1]A 11 = R l , A 12 = T − , A 21 = T + , A 22 = R rB 11 = T + T − − R l R rT − , B 12 = RrT − , B 21 = − RlT − , B 22 = 1T −A 11 = − B 21, A 12 = 1 , A 21 = B 11B 22 − B 12 B 21, A 22 = B 12B 22 B 22 B 22 B 22B 11 = A 12A 21 − A 11 A 22, B 12 = A 22, B 21 = − A 11, B 22 = 1A 12 A 12 A 12 A 12
2 Adimensionnementl ∈ [a, b] ↦−→ x ∈L = b − a[− 1 2 , 1 ]2On donnera une version simplifiée <strong>de</strong>s formules <strong>de</strong> passage avec a = − L 2 et b = L 2 .Les paramètres dimensionnés sont notés avec un ˜.2.1 Paramètres géométriques dépendant <strong>de</strong> la translation2.1.1 Cas général⎡V = ⎣ φ 1A = V T ⎛⎜⎝1L0( L 0à = V T 0 − a + b2( ( ˜Υ a+b) 2)2) ) 2φ 2(˜Υ( a+b2⎤ ⎡⎦ = ⎣ φ 1x = X (l) = l − a+b2Ll = L(x) =Lx + a + b2⎞0⎟a + b ⎠ Ũ (B = VT2L)U(˜B = V T(Υ( a+b) 2)L 2 2) ) 2φ 2(ΥL 2 ( a+b2)0 1˜Υ a + b Ũ02)0 1− Υ a + b U0L 2⎤[ ]⎦ A, U = , Ũ =B[ ØB]2.1.2 Cas particulier a = − L 2 et b = L 2x = X (l) = l Ll = L(x) =LxA = 1 LÃà = LAB = ˜B˜B = B
2.2 Variables et fonctions <strong>de</strong> base2.2.1 Variables indépendantes et coefficients2.2.2 Rayons, pentes et surfacest = c 0L ˜t s = L c 0˜s Υ=L 2 ˜Υ ε =√L˜ε˜t = L c 0t ˜s = c 0L s ˜Υ =1L 2 Υ ˜ε = 1 √LεR ( x ) = 1 L ˜R ( L(x) )˜R ( l ) = LR (X (l))dR( ) 1 x =dx Ld ˜Rdxd ˜R ( ) dR l = Ldl dl( ) d ˜R ( )L(x) = ldldR( )(X (l)) = xdxσ ( x ) = Lζ ( L(x) ) = R′( x )R ( x ) S( x ) = πR ( x ) 2 1 =L ˜S ( 2 L(x) )ζ(l) = 1 L σ (X (l)) = ˜R ′( l )˜R ( l )) ) 2˜S( l = π ˜R( l = L 2 S (X (l))C Υ : z(√ )↦→ cosh Υ zS Υ : z ↦→( √Υ )sinh z√Υ˜R(l) =LR ( X (l) ) = ÃC˜Υ(l)+ ˜BS˜Υ(l)˜R ′ (l) = d ˜R (l) =LdRdl dl (X (l)) = Ã ˜Υ S ˜Υ(l)+ ˜BC˜Υ(l)R(x) = 1 L ˜R ( L(x) ) = AC Υ (x)+BS Υ (x)R ′ (x) = dRdx (x) = 1 d ˜R ( )L(x)L dx= A Υ S Υ (x)+BC Υ (x)2.2.3 Autres fonctions( c0)Γ(s) =L˜ΓL s = √ s 2 1+Υ e ac (x, t) =ρ 0 c 2 0 L 2 ẽac˜Γ(˜s) = 1 ( ) LL Γ ˜s =c 0(L(x), L )tc 0√ ( ) ˜s 2+c ˜Υ(ẽ ac l, ˜t ) (= ρ 0 c 2 0 L 2 e ac X (l), c 00 L ˜t)
2.3 Variables d’états2.3.1 Variables <strong>de</strong> KirchoffP (x, t) = 1 (ρ 0 c ˜P L(x), L )t2 0 c 0(˜P (l, t) =ρc 2 0 P X (l), c )0L t⎧⎨⎩2.3.2 Variables <strong>de</strong> type on<strong>de</strong>s planes p ±e ac (x, t) = 1 2 R(x)2 [(1+ R c 2(1U(x, t) =c 0 L 2 S ( L(x) ) Ũ L(x), L )tc 0) (Ũ(l, t) =c 0 ˜S( X (l) U X (l), c )0L t∂x 2 P (x, (x)t)+2R′ R(x) ∂ x P (x, t) − ∂t 2 P (x, t) = 0∂ t U(x, t)+∂ x P (x, t) = 0{ []()s 2 +Υ− ∂x2 R(x)P (x, s) = 0sU(x, s)+∂ x P (x, s) = 0e ac (x, t) =πR(x) 2 P (x, t) 2 + U(x, t) 2p ± (x, t) = 1 (ρ 0 c 2 ˜p± L(x), L )t0 ( c 0˜p ± (l, t) =ρ 0 c 2 0 p ± X (l), c )0L t[ ] [ ][ ]p + (x, s)p − = 1 1 S(x)/Sc P (x, s)(x, s) 2 1 −S(x)/S c U(x, s)[ ] [][ ]P (x, s) 1 1 p + (x, s)=U(x, s) S c /S(x) −S c /S(x) p − (x, s)R(x) 2 ) (p + (x, t) 2 + p − (x, t) 2) +22.3.3 Variables <strong>de</strong> type on<strong>de</strong>s sphériques φ ±2(1 − R c 2 )]R(x) 2 p + (x, t)p − (x, t)(φ ± 1(x, t) =Lρ 0 c ˜φ ± L(x), L )t2 0 c 0˜φ ( ± (l, t) =Lρ 0 c 2 0 φ ± X (l), c )0L t[ ] [ ][φ + (x, sφ − = R(x) 1 1 P (x, s)(x, s) 2 1 −1 U(x, s)[ ] [ ][P (x, s)= 1 1 1 φ + (x, s)U(x, s) R(x) 1 −1 φ − (x, s)]]{ (s + ∂x)φ + (x, s) = σ(x)φ − (x, s)(s − ∂x)φ − (x, s) = −σ(x)φ + (x, s)
e ac (x, t) =π(φ + (x, t) 2 + φ − (x, t) 2)2.3.4 Variables <strong>de</strong> type on<strong>de</strong>s sphériques ψ ±(ψ ± 1(x, t) =Lρ 0 c ˜ψ ± L(x), L )t2 0 c 0˜ψ ( ± (l, t) =Lρ 0 c 2 0 ψ ± X (l), c )0L t[ ] [ ][ ]ψ + (x, s)ψ − = R(x) 1 1 P (x, s)(x, s) 2 1 −1 U(x, s)[ ] [ ][ ]P (x, s)= 1 1 1 ψ + (x, s)U(x, s) R(x) 1 −1 ψ − (x, s)⎧⎪⎨+ R′ (x)2s+ R′ (x)sR(x) 2 [01( )s + ∂x ψ + (x, s) = − Υ ψ(x, s)2s[ ]−1P (x, s)1]ψ(x, s)⎪⎩( )s − ∂x ψ + (x, s) = − Υ ψ(x, s)2se ac (x, t) = 1 (2 ρ 0c 2 0 πL[(1+2 1+ σ(x) ) ) 2ψ + (x, t) 2 +t( ( ) )]σ(x)2+2 2 −ψ + (x, t)ψ − (x, t)t(1+(1 − σ(x) ) ) 2ψ − (x, t) 2t
3 Convention “tronçon”3.1 Présentation <strong>de</strong> la convention “tronçon”p + (− 1 2 ,s)p + ( 1u(− 1 2 ,s)2 ) u( 1 2 )u lp inl(s)p outr (s)u rp − (− 1 2 ,s)p − ( 1 2 ,s)p outl(s)p inr (s)Figure 2 – Convention axialeFigure 3 – Convention tronçonσ(l) = R′ (l)R(l)σ l = R′ (− 1 2 )R(− 1 2 ) , σ r = − R′ ( 1 2 )R( 1 2 )[ ] p+p − = 1 [ ][ 1 S/Sc P2 1 −S/S c U[ ] [ P 1 1=U S c /S −S c /S][ p+p − ]] [pinl/rp out[Pl/rl/r]= 1 2] [=U l/r[ ][ ]1 Sl/r /S c Pl/r1 −S l/r /S c U l/r] [ 1 1 p inS c /S l/r −S c /S l/rl/rp outl/r][ ] φ+φ − = R [ ][ 1 1 P2 1 −1 U[ ] P= 1 [ 1 1U R 1 −1][ φ+φ − ]] [φinl/rφ out]= R l/rl/r 2]U l/r[Pl/r[ 1 11 −1= 1R l/r[ 1 11 −1][Pl/rU l/r]] [ φ inl/rφ outl/r][ ψ+[ PUψ − ]= R 2]= 1 R[ 1 11 −1[ 1 11 −1][ PU] [+ R′ −12s 1][ ψ+ψ − ]+ R′sR 2 [ 01]P]ψ[ψinl/rψ outl/r[Pl/rU l/r]]== R l/r2+ R′ l/r2s[ 1 11 −1[ −111R l/r[ 1 11 −1+ R′ l/rsR l/r2⎡⎣]P l/r][Pl/rU l/r]] [ ψl/rinψl/rout⎤0σ l/rR ′ l/r /R l/r]⎦ ψ l/r
3.2 Fonctions et paramètres <strong>de</strong> baseC Γ (s) =cosh ( Γ(s) )S Γ (s) = sinh ( Γ(s) )Γ(s)T (s) = e −Γ(s) = D(s)e −s = T + (s) =T − (s)D(s) = e s−Γ(s)R(s) = s − Γ(s)s +Γ(s)R le (s) = T le (s) − 1 = s − Γ(s) − σ ls +Γ(s)+σ l=R re (s) = T re (s) − 1 = s − Γ(s) − σ rs +Γ(s)+σ r=R li (s) = T li (s) − 1 = − s − Γ(s)+σ ls +Γ(s)+σ l=R ri (s) = T ri (s) − 1 = − s − Γ(s)+σ rs +Γ(s)+σ r=2ss +Γ(s)+σ l− 12ss +Γ(s)+σ r− 12Γ(s)s +Γ(s)+σ l− 12Γ(s)s +Γ(s)+σ r− 1k l = S c − S lS c + S l= − Z c − Z lZ c + Z lk r = S c − S rS c + S r= − Z c − Z rZ c + Z rR s ll(s) =−σ 2s + σ lσ rRr(s) s =−2s + σ rσ l = R′ (− 1 2 )R(− 1 2 )σ r = − R′ ( 1 2 )R( 1 2 )
3.3 Quadripôles <strong>de</strong> conversionP l1p inlp outr−2 S cS rU rS cS l−1−1S cS rU l−2 S cS lp outlp inr1P rFigure 4 – Quadripôle <strong>de</strong> conversion(P l ,U l ) ↔ (p inl,p outl)Figure 5 – Quadripôle <strong>de</strong> conversion(p inl,p outl) ↔ (P l ,U l )P lR lφ inlφ outr− 2 R rU r1 −1−1 1U l− 2 R lφ outlφ inrR rP rFigure 6 – Quadripôle <strong>de</strong> conversion(P l ,U l ) ↔ (φ inl,φ outl)Figure 7 – Quadripôle <strong>de</strong> conversion(φ inl,φ outl) ↔ (P l ,U l )P lR lψ inlψ outr− 2 R rU r1+ σ ls−1−11+ σ rsU l− 2 R lψ outlψ inrR rP rFigure 8 – Quadripôle <strong>de</strong> conversion(P l ,U l ) ↔ (ψlin ,ψl out )Figure 9 – Quadripôle <strong>de</strong> conversion(ψlin ,ψl out ) ↔ (P l ,U l )
3.4 Fonctions <strong>de</strong> transfertP l (s)H 21 (s)U r (s)H 11 (s)H 22 (s)U l (s)H 12 (s)P r (s)Figure 10 – Quadripôle en variables (P, U)Fonctions <strong>de</strong> transfert en variables (P, U) Voir figure 10H 11 (s) = 1 C Γ (s)+σ l S Γ (s)s S Γ (s)H 22 (s) = − 1 C Γ (s)+σ r S Γ (s)s S Γ (s)( ) 3 Rl 1 1H 12 (s) = −R r s S Γ (s)H 21 (s) =(RrR l) 31s1S Γ (s)Fonctions <strong>de</strong> transfert en variables (p in ,p out ) Voir figure 11p inl(s)T + p (s)p outr (s)R l p(s)R r p(s)p outl(s)T − p (s)p inr (s)Figure 11 – Quadripôle en variables (p in ,p out )T + p = R lR r((1 + kl )(1 − k r )T φ)/dpT − p = R rR l((1 − kl )(1 + k r )T φ)/dpR l p = ( k l + k l k r R r φ + k rR l φ Rr φ + Rl φ − k rT 2 φ)/dpRp r = ( k r + k r k l Rφ l + k lRφ r Rl φ + Rr φ − k lTφ) 2 /dpd p = 1+ ( k l Rφ l + k rRφ r + k lk r Rφ l Rr φ − k lk r Tφ2 )
φ inl(s)T + φ (s)φ outr (s)R l φ (s)R r φ (s)φ outl(s)T − φ (s)φ inr (s)Figure 12 – Quadripôle en variable (φ in ,φ out )Fonctions <strong>de</strong> transfert en variables (φ in ,φ out ) Voir figure 12T φ (s) =[ (1+ σ l + σ r2sRφ l (s) = [ (σl + σ r−sRφ r (s) = [ (σl + σ r−s)C Γ (s)+ 1 ( Γ(s)22 s( Γ(s)2)C Γ (s) −)C Γ (s) −s( Γ(s)2s( σl σ) ) r+ s + + σ l + σ r S Γ (s)s( σl σ) ) ]r− s + + σ l − σ r S Γ (s)s( σl σ) ) r− s + − σ l + σ r S Γ (s)s]] −1T φ (s)2T φ (s)2T + φ=T − φ=T le T ri T +1 − R ri R li T − T +T re T li T −1 − R ri R li T − T +R l φ = R le + R riT le T li T + T −1 − R ri R li T − T +R r φ = R re + R liT re T ri T + T −1 − R ri R li T − T +(Rφ l = (1 − RrR s ψ )Rl s +(1+2Rs l )( R ψ + Rr(T s ψ 2 − R2 ψ ))) /d φ(Rφ r = (1 − Rl s R ψ)Rr s +(1+2Rs r )( R ψ + Rl s (T ψ 2 − R2 ψ ))) /d φ()T φ = (1 + Rl s )(1 + Rs r )T ψ /d φd φ = 1− ( Rl s R ψ + RrR s ψ − Rl s Rs rR 2 ψ + Rl s Rs 2rT )ψFonctions <strong>de</strong> transfert en variables (ψ in ,ψ out ) Voir figure 13[T + ψ (s) = T − ψ (s) =T ψ(s) = C Γ (s)+ 1 2(Rψ l (s) = Rr ψ (s) =R ψ(s) = 1 − Γ(s)22 s(Γ(s) 2)+ s S Γ (s)s)+ s S Γ (s)T ψ (s)] −1
ψlin (s)T + ψ (s)ψrout (s)R l ψ (s)R r ψ (s)ψlout (s)T − ψ (s)ψ inr (s)Figure 13 – Quadripôle en variables (ψ in ,ψ out )T ψ =R ψ =(1 − R2 ) T1 − R 2 T 2 = D ψe −s =(1 − T2 ) R1 − R 2 T 2(1 − R2 ) D1 − R 2 T 2 e−s
4 Connexion <strong>de</strong> <strong>de</strong>ux tubes4.1 Connexion à régularité au moins C 1Voir figures 14 et 15.q in1,lq out1,rq in2,lq out2,rD 1 (s 1 )e −s1−R 1,2 (s 1 ,s 2 )D 2 (s 2 )e −s2D 1 (s 1 )e −s1D 2 (s 2 )e −s2q out1,lq in1,rq out2,lq in2,rFigure 14 – Concaténation à régularité au moins C 1D k (s k ) = e s k − Γ k (s k )( )Γ k (s k ) =√s 2 3k +Υ k +2ε k s k 2R 1,2 (s 1 ,s 2 ) = s 2Γ 1 (s 1 ) − s 1 Γ 2 (s 2 )s 2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 )q in1,lχ in1,lχ out1,rχ in2,lχ out2,rq out2,rD 1 (s 1 )e −s1T 2 χ(s 1 ,s 2 )e −s2C q,χRχ 1 (s 1,s 2 ) Q χ Rχ 2 (s 1,s 2 )C χ,qe −s1T 1 χ(s 1 ,s 2 )e −s2 D 2(s 2 )q out1,lχ out1,lχ in1,rχ out2,lχ in2,rq in2,rFigure 15 – Concaténation à régularité au moins C 1T 1 χ(s 1 ,s 2 ) = D 1 (s 1 ) ( 1 − R 1,2 (s1,s 2 ) ) = L 2L 12s 1 Γ 2 (s 2 )s 1 Γ 2 (s 2 )+s 2 Γ 1 (s 1 ) es 1−Γ 1 (s 1 )T 2 χ(s 1 ,s 2 ) = D 2 (s 2 ) ( 1+R 1,2 (s1,s 2 ) ) = L 1L 22s 2 Γ 1 (s 1 )s 2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) es 2−Γ 2 (s 2 )R 1 χ(s 1 ,s 2 ) = D 1 (s 1 )R 1,2 (s1,s 2 )= s 2Γ 1 (s 1 ) − s 1 Γ 2 (s 2 )s 2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) es 1−Γ 1 (s 1 )R 2 χ(s 1 ,s 2 ) = −D 2 (s 2 )R 1,2 (s1,s 2 )= s 1Γ 2 (s 2 ) − s 2 Γ 1 (s 1 )s 2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) es 2−Γ 2 (s 2 )
4.2 Connexion à régularité au moins C 0Voir figures 16 et 17.q in1,lq out1,rq in2,lq out2,rD 1 (s)e −s1D 1 (s)e −s1R h 1,2 (s 1,s 2 )L 1L 2L 2L 1R h 2,1 (s 1,s 2 )D 2 (s)e −s2D 2 (s)e −s2q out1,lq in1,rq out2,lq in2,rFigure 16 – Concaténation à régularité au moins C 0D k (s k ) = e s k − Γ k (s k )( )Γ k (s k ) =√s 2 3k +Υ k +2ε k s k 2Rk h (s 1,s 2 ) = β (k s2 Γ 1 (s 1 ) − s 1 Γ 2 (s 2 ) − ( )s 2 σ 1,r + s 1 σ 2,l(s2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) ) + ( )s 2 σ 1,r + s 1 σ 2,lavec β 1,2 =1et β 2,1 = −1.q in1,lχ in1,lχ out1,rχ in2,lχ out2,rq out2,rD 1 (s 1 )e −s1T 2 χ(s 1 ,s 2 )e −s2C q,χRχ(s 1 1 ,s 2 ) Q χ Rχ(s 2 1 ,s 2 )C χ,qe −s1T 1 χ(s 1 ,s 2 )e −s2 D 2 (s 2 )q out1,lχ out1,lχ in1,rχ out2,lχ in2,rq in2,rFigure 17 – Concaténation à régularité au moins C 0T 1 χ(s 1 ,s 2 ) = D 1 (s 1 ) ( 1 − R j 2,1 (s 1,s 2 ) ) = L 2L 12s 1 Γ 2 (s 2 )(s2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) ) + ( s 2 σ 1,r + s 1 σ 2,l)e s 1−Γ 1 (s 1 )Tχ(s 2 1 ,s 2 ) = D 2 (s 2 ) ( 1+R j 1,2 (s 1,s 2 ) ) = L 12s 2 Γ 1 (s 1 )(L 2 s2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) ) + ( )e s 2−Γ 2 (s 2 )s 2 σ 1,r + s 1 σ 2,l(s2 Γ 1 (s 1 ) − s 1 Γ 2 (s 2 ) ) − ( )s 2 σ 1,r + s 1 σ 2,lRχ 1 (s 1,s 2 ) = D 1 (s 1 )R1,2 h (s 1,s 2 )=( s2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) ) + ( )e s 1−Γ 1 (s 1 )s 2 σ 1,r + s 1 σ 2,l(s1 Γ 2 (s 2 ) − s 2 Γ 1 (s 1 ) ) − ( s 2 σ 1,r + s 1 σ 2,l)Rχ 2 (s 1,s 2 ) = D 2 (s 2 )R2,1 h (s 1,s 2 )=( s2 Γ 1 (s 1 )+s 1 Γ 2 (s 2 ) ) + ( )e s 2−Γ 2 (s 2 )s 2 σ 1,r + s 1 σ 2,l
4.3 Connexion à régularité quelconqueVoir figures 18 et 19.q in1,lq out1,rq in2,lq out2,rD 1 (s)e −s1D 1 (s)e −s1R j 1,2 (s 1,s 2 )R 2,lR 1,rR 1,rR 2,lR j 2,1 (s 1,s 2 )D 2 (s)e −s2D 2 (s)e −s2q out1,lq in1,rq out2,lq in2,rFigure 18 – Concaténation à régularité quelconqueD k (s k ) = e s k − Γ k (s k )( )Γ k (s k ) =√s 2 3k +Υ k +2ε k s k 2R j k (s 1,s 2 ) = β (k s2 S 1,r Γ 1 (s 1 ) − s 1 S 2,l Γ 2 (s 2 ) − ( )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,l(s2 S 1,r Γ 1 (s 1 )+s 1 S 2,l Γ 2 (s 2 ) ) + ( )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,lavec β 1,2 =1et β 2,1 = −1.q in1,lχ in1,lχ out1,rχ in2,lχ out2,rq out2,rD 1 (s 1 )e −s1T 2 χ(s 1 ,s 2 )e −s2C q,χRχ(s 1 1 ,s 2 ) Q χ Rχ(s 2 1 ,s 2 )C χ,qe −s1T 1 χ(s 1 ,s 2 )e −s2 D 2 (s 2 )q out1,lχ out1,lχ in1,rχ out2,lχ in2,rq in2,rFigure 19 – Concaténation à régularité quelconqueT 1 χ (s 1,s 2 ) = D 1 (s 1 ) ( 1 − R j 2,1 (s 1,s 2 ) )= R 1,r2s 1 Γ 2 (s 2 )S( 2,lR 2,l s2 S 1,r Γ 1 (s 1 )+s 1 S 2,l Γ 2 (s 2 ) ) + ( )e s 1−Γ 1 (s 1 )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,lTχ 2 (s 1,s 2 ) = D 2 (s 2 ) ( 1+R j 1,2 (s 1,s 2 ) )= R 2,l2s 2 Γ 1 (s 1 )S( 1,rR 1,r s2 S 1,r Γ 1 (s 1 )+s 1 S 2,l Γ 2 (s 2 ) ) + ( )e s 2−Γ 2 (s 2 )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,lRχ 1 (s 1,s 2 ) = D 1 (s 1 )R j 1,2 (s 1,s 2 )(s2 S 1,r Γ 1 (s 1 ) − s 1 S 2,l Γ 2 (s 2 ) ) − ( )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,l= (s2 S 1,r Γ 1 (s 1 )+s 1 S 2,l Γ 2 (s 2 ) ) + ( )e s 1−Γ 1 (s 1 )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,lRχ 2 (s 1,s 2 ) = D 2 (s 2 )R j 2,1 (s 1,s 2 )(s1 S 2,r Γ 2 (s 2 ) − s 2 S 1,l Γ 1 (s 1 ) ) − ( )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,l= (s2 S 1,r Γ 1 (s 1 )+s 1 S 2,l Γ 2 (s 2 ) ) + ( )e s 2−Γ 2 (s 2 )s 2 S 1,r σ 1,r + s 1 S 2,l σ 2,l
5 Connection avec une impédance passivee −sq outr1 − R(s)ψ outrU outr−c 0 ˜SrŨ outr−R(s)R(s)−11+ σrs˜Ze −sD(s)q inr1+R(s)ψ inrR r− 2 R r1U inrρ 0c 02Ũ inrFigure 20 – Concaténation avec une impédance passivee −se −sq outrq inr− 2ρ 0c 0 s 2 + ˜S r ˜Z( 2sσr − 2sΓ(s) )2ρ 0 c 0 s 2 + ˜S r ˜Z( 2sσr +2sΓ(s) )Figure 21 – Concaténation avec une impédance passive
6 Forme standard réduite et applicationsφ inlφ outrF le −sH lG lG rHre −sF rφ outlFigure 22 – Forme standard réduiteφ inr6.1 Expression <strong>de</strong>s fonctions H et FH l (s) = Rφ l (s) − D+ φ (s)G r(s)e −2sH r (s) = Rφ r (s) − D− φ (s)G l(s)e −2sF l (s) = D + φ (s)( 1 −G l (s)G r (s)e −2s)F r (s) = D − φ (s)( 1 −G l (s)G r (s)e −2s)6.2 Forme “décomposée” : Gui<strong>de</strong> d’on<strong>de</strong>H l (s) = R le (s) = s − Γ(s) − σ ls +Γ(s)+σ lH r (s) = R re (s) = s − Γ(s) − σ rs +Γ(s)+σ rF l (s) = D(s) ( 1+R ri (s) )( 1+R le (s) ) ()()= e s−Γ(s) 2Γ(s)2ss +Γ(s)+σ r s +Γ(s)+σ lF r (s) = D(s) ( 1+R li (s) )( 1+R re (s) ) ()()= e s−Γ(s) 2Γ(s)2ss +Γ(s)+σ l s +Γ(s)+σ rG l (s) = R li(s) ( 1+R ri (s) )D(s) = − e s−Γ(s) s − Γ(s)+σ l1+R li (s)s +Γ(s)+σ rG r (s) = R ri(s) ( 1+R li (s) )D(s) = − e s−Γ(s) s − Γ(s)+σ r1+R ri (s)s +Γ(s)+σ l
6.3 Formes standards équivalentes et connexionsLes trois formes standards fig. 23, fig. 24 et fig. 25 sont équivalentes.φ inlφ outrF le −s1H lG lG rHr1e −sF rφ outlFigure 23 – Forme standard 1φ inrφ inlφ outr1F l e −s1H lG l /F lG r /F rHr1F r e −s1φ outlFigure 24 – Forme standard 2φ inrφ inlφ outr1e −sF lH lG l F r /F lG r F l /F rHrF re −s1φ outlFigure 25 – Forme standard 3φ inr
6.3.1 Connexion (au moins C 0 ) <strong>de</strong> 2 formes standards 1Les systèmes <strong>de</strong>s figures 26 et 27 sont équivalents.1F 2 lG 1 rH 1 rH 2 lG 2 lF 1 r1Figure 26 – Connexion standard 1F 2 l1 −H 1 rH 2 lGr 1 + F r 1 Hl21 −Hr 1H2 lF 2 l H1 rGl 2 +1 −HrH 1 l2F 1 r1 −H 1 rH 2 lFigure 27 – Connexion standard 16.3.2 Connexion (au moins C 0 ) <strong>de</strong> 2 formes standards 2Les systèmes <strong>de</strong>s figures 28 et 29 sont équivalents.11G 1 r /F 1 rH 1 rH 2 lG 2 l /F 2 l11Figure 28 – Connexion standard 26.3.3 Connexion (au moins C 0 ) <strong>de</strong> 2 formes standards 3Les systèmes <strong>de</strong>s figures 30 et 31 sont équivalents.
11 −H 1 rH 2 lGr1Fr1H 2 l+1 −Hr 1H2 lGl2Fl2H 1 r+1 −Hr 1H2 l11 −H 1 rH 2 lFigure 29 – Connexion standard 2F 1 l1G 1 r F 1 l /F 1 rH 1 rH 2 lG 2 l F 2 r /F 2 l1F 2 rFigure 30 – Connexion standard 3F 1 l1 −H 1 rH 2 lG 1 r F 1 lF 1 r+ H2 l F 1 l1 −H 1 rH 2 lG 2 l F 2 rF 2 l+ H1 rF 2 r1 −H 1 r H2 lF 2 r1 −H 1 r H2 lFigure 31 – Connexion standard 3
10ème Congrès Français d’AcoustiqueLyon, 12-16 Avril 2010Représentation géométrique optimale <strong>de</strong> la perce <strong>de</strong> cuivres pour le calculd’impédance d’entrée et <strong>de</strong> transmittance, et pour l’ai<strong>de</strong> à la lutherieThomas Hélie, Thomas Hézard, Rémi MignotCNRS UMR 9912 - IRCAM, 1 place Igor Stravinsky, F-75004 Paris,{thomas.helie,thomas.hezard,remi.mignot}@ircam.frDans cet article, nous nous intéressons à représenter efficacement l’acoustique <strong>de</strong> tubes à symétrie axialeayant une perce C 1 , c’est-à-dire, continue et à dérivée continue. Pour ce faire, nous nous appuyons sur unmodèle 1D proche <strong>de</strong> l’équation <strong>de</strong>s pavillons mais plus raffiné (l’équation dite <strong>de</strong> “Webster-Lokshin” àabscisse curviligne) ainsi que <strong>de</strong>s modèles simplifiés d’embouchure et <strong>de</strong> rayonnement à calotte sphériquepour les pavillons. Le modèle <strong>de</strong> propagation inclut l’effet <strong>de</strong>s pertes visco-thermiques sous l’hypothèse<strong>de</strong>s tubes acoustiques larges (impédance <strong>de</strong> paroi équivalente <strong>de</strong> Cremer). De plus, il repose sur <strong>de</strong>sapproximations sur la géométrie <strong>de</strong>s isobares plus faibles (quasi-sphéricité au voisinage <strong>de</strong> la paroi) queles approximations usuelles (on<strong>de</strong>s planes ou sphériques). Une résolution exacte du modèle <strong>de</strong> propagationest possible lorsque ses coefficients (Υ quantifiant l’évasement du profil et ε quantifiant les pertes) sontconstants. Les profils géométriques admissibles définissent <strong>de</strong>s tronçons. Le profil complet est réalisépar leur concaténation en imposant que leur jonction soit <strong>de</strong> régularité C 1 . Si la longueur totale estfixée, un tel profil <strong>de</strong> N tronçons possè<strong>de</strong> exactement 2N +1 paramètres libres (N paramètres Υ, N−1longueurs, et 2 coefficients libres). Un algorithme qui optimise ces paramètres pour tout profil donné a étéconstruit. Il permet d’obtenir <strong>de</strong>s <strong>de</strong>scriptions fidèles d’une perce cible, préservant la régularité C 1 , parun nombre réduit <strong>de</strong> tronçons (comparativement aux représentations en tubes droits ou coniques). Unformalisme classique en matrices <strong>de</strong> transfert permet <strong>de</strong> fournir l’impédance d’entrée et la transmittance<strong>de</strong> l’instrument. Ce travail est présenté <strong>de</strong> la façon suivante. Après quelques rappels historiques, nousprésentons le modèle acoustique . Puis, nous introduisons une famille <strong>de</strong> profils paramétrés permettantla résolution exacte <strong>de</strong>s matrices <strong>de</strong> transfert acoustiques. Nous construisons un algorithme pour estimerles paramètres correspondant à un profil cible. Enfin, nous testons cet algorithme et reconstruisons lesimpédances d’entrée. Nous comparons ces résultats à<strong>de</strong>s mesures et àceuxobtenus par d’autres métho<strong>de</strong>s(concaténation <strong>de</strong> tubes droits, coniques, ou intégration numérique spatiale du modèle original).1 Sur les équations <strong>de</strong>s pavillons1.1 Historique abrégé et contexteModèle 1D et géométrie Le premier modèle <strong>de</strong>tube acoustique à dépendance mono-spatiale fut établipar Lagrange [1] et Bernoulli [2]. Cette équation dite“<strong>de</strong> Webster” [3], abondamment étudiée [4], repose sur<strong>de</strong>s hypothèses qui ont été périodiquement révisées.Ainsi, pour assurer l’orthogonalité <strong>de</strong>s fronts d’on<strong>de</strong>sà la paroi, Lambert [5] et Weibel [6] réfutent l’hypothèseinitiale d’on<strong>de</strong>s planes et postulent leur sphéricité. Laquasi-sphéricité est validée expérimentalement dans lespavillons aux basses fréquences par Bena<strong>de</strong> et Janson[7]. Puis, Putland [8] montre qu’une propagationà dépendance mono-spatiale ne peut être gouvernéeque par une équation <strong>de</strong> Webster, pour “une certainecoordonnée”, et que les on<strong>de</strong>s planes, cylindriques ousphériques seules peuvent respecter une telle propriété.Malgré cette restriction, <strong>de</strong>s raffinements <strong>de</strong> modèles1D ont encore été recherchés car ils permettent <strong>de</strong>s calculsd’impédance aisés et la plage fréquentielle non perturbéepar les mo<strong>de</strong>s transverses reste intéressante pourbon nombre d’instruments à vent. Ainsi, [9] suppose <strong>de</strong>sfronts d’on<strong>de</strong>s en ellipsoï<strong>de</strong>s. Dans [10], un modèle exactest établi dans la carte <strong>de</strong>s isobares, à partir duquel uneéquation <strong>de</strong> Webster est obtenue en supposant uniquementla quasi-sphéricité <strong>de</strong>s isobares au voisinage <strong>de</strong> laparoi (hypothèse retenue dans cet article).Pertes visco-thermiques Un autre raffinement estla modélisation <strong>de</strong>s pertes visco-thermiques aux parois.Kirchhoff introduit l’effet <strong>de</strong> conduction thermique etétend la théorie <strong>de</strong> Stokes. Il fournit <strong>de</strong> premières solutionssimples dans l’espace libre et dans un tube. Ildonne la formule <strong>de</strong> dispersion générale exacte pourun cylindre lorque le problème est à symétrie <strong>de</strong>révolution [11] (en l’absence <strong>de</strong> symétrie, une versionexacte généralisée est établie dans [12, éq.(56)]).Certaines simplifications sont aussi proposées. Ainsi,la théorie <strong>de</strong> Zwikker et Kosten (cf. e.g. [13, p210])est établie en séparant les effets <strong>de</strong> couches limites visqueuseset thermiques dans les équations <strong>de</strong> départ. Lesconditions <strong>de</strong> validité <strong>de</strong> cette théorie sont données dans[14, 15] qui exhibent un lien plus direct avec l’équation<strong>de</strong> dispersion <strong>de</strong> Kirchhoff. De plus, Cremer établit l’admittanceéquivalente d’un écran plan réfléchissant <strong>de</strong>son<strong>de</strong>s planes pour un angle d’inci<strong>de</strong>nce donné [16]. Cerésultat coïnci<strong>de</strong> avec celui <strong>de</strong> Kirchhoff pour un gui<strong>de</strong> à
sectionrectangulairelarge(épaisseur<strong>de</strong>scoucheslimitesfaibles <strong>de</strong>vant les longueurs du rectangle).Pour ces simplifications, les équations <strong>de</strong> propagationincluent un terme avec une dérivée temporelle fractionnaire(voir l’équation <strong>de</strong> Lokshin [17, 18] et aussi[19]). Des solutions exactes <strong>de</strong> l’équation <strong>de</strong> Lokshin ontété données par Matignon [20, 21] et mettent en lumièreuneffet<strong>de</strong>mémoirelongue.Lapriseencompte<strong>de</strong>pertesdans l’équation <strong>de</strong>s pavillons établie dans [10] fait apparaîtreun terme similaire.Contexte et approche Le modèle considéré ici reposesur l’hypothèse <strong>de</strong> quasi-sphéricité <strong>de</strong>s isobares auvoisinage <strong>de</strong> parois à admittance <strong>de</strong> Cremer. Les étapespour son établissement sont données ci-<strong>de</strong>ssous.1.2 Equation <strong>de</strong>s on<strong>de</strong>s et isobaresDanslesystème<strong>de</strong>coordonnéescylindriques(r,θ,z),les isobares d’un problème à symétrie d’axe (Oz) ont <strong>de</strong>s<strong>de</strong>scriptions paramètriques (localement au moins) <strong>de</strong> laforme r = f(s,u,t), z = g(s,u,t) et θ ∈ [0,2π[, où sin<strong>de</strong>xe une isobare, u est une coordonnée libre. Puisquele niveau <strong>de</strong> pression ne dépend spatialement que <strong>de</strong> s,la carte dynamique (f,g) satisfait l’équation implicite∃p ∣ P(z = f(s,u,t), r = g(s,u,t), t) = p(s,t).En exploitant cette équation et le changement <strong>de</strong>(coordonnées(z,r,t) → (s,u,t), l’équation <strong>de</strong>s on<strong>de</strong>s ∂z 2 +)1r ∂ r +∂r 2 − 1 c∂ 2 2 t P(z,r,t) = 0 se récrit exactement(α(s,u,t)∂s+β(s,u,t)∂ 2 s +γ(s,u,t)∂ s ∂ t + 1 )c 2∂2 t p(s,t)=0, (1)où α, β, γ sont <strong>de</strong>s expressions (détaillées dans [22, 10])<strong>de</strong> f, g et leurs dérivées jusqu’à l’ordre 2 en s, u, t.En appliquant la dérivation ∂u k pour k = 1,2,3 àcette <strong>de</strong>rnière équation, on trouve que, pour tout s,u,t,⎛⎝∂ u α ∂ u β ∂ u γ∂ 2 uα ∂ 2 uβ ∂ 2 uγ∂ 3 uα ∂ 3 uβ ∂ 3 uγ⎞ ⎛⎠ ⎝∂ 2 sp∂ s p∂ s ∂ t p⎞⎛⎠ = ⎝000⎞⎠.Lanullité dudéterminant <strong>de</strong>lamatrice 3×3 fournit doncune condition nécessaire, purement géométrique, pourque la carte isobare correspon<strong>de</strong> à une propagation.Dans le cas statique (∂ t f = ∂ t g = 0), une étu<strong>de</strong> similairemontre que les seules cartes admissibles correspon<strong>de</strong>ntaux cas connus : on<strong>de</strong>s planes, cylindriques,sphériques,cartesmodalesassociéesàunnombred’on<strong>de</strong>k 0 réel (oscillation infinie) ou bien imaginaire pur (on<strong>de</strong>exponentielle non oscillante). Dans le cas modal, ondéduit <strong>de</strong> l’équation isobare l’invariant géométrique∂ s ln(g 2 (∂ sf) 2 +(∂ s g) 2 ) ((∂ u f) 2 +(∂ u g) 2 +2 (∂ s f) 2 +(∂ s g) 2) sk0 2 = 0,si on choisit l’in<strong>de</strong>x s égal au niveau <strong>de</strong> la déforméemodale (voir [10] pour plus <strong>de</strong> détails). Ainsi, aucunecarte statique ne peut porter une propagation 1D nonmodale si le tube n’est ni droit, ni conique.1.3 Approximation 1D pour paroi idéaleUne paroi idéalement immobile et rigi<strong>de</strong> appartientaux lignes <strong>de</strong> champ <strong>de</strong> pression (cf. [22, p33] pour lescasdégénérés).Enchoisissantuorthogonaleàs,ilexistedonc (f,g) et w tels que f(s,u=w,t)=F(s), g(s,u=w,t)=R(s) où F,R est une paramétrisation <strong>de</strong> la perce.En évaluant (1) en u = w, on trouve les coefficientsexacts α(s,w,t) = 1/ ( F ′ (s) 2 +R ′ (s) 2) , β(s,w,t) = 0 etγ(s,w,t)α(s,w,t) = d (ln∣ R(s))ds F ′ ∣ +∂ s ln ∣ ∂u g(s,u=w,t) ∣ . (2)(s)La seule information géométrique manquante pour obtenirun modèle 1D via (1) est donc le second terme <strong>de</strong>(2) qui met en jeu une dérivée d’ordre 1 en u (variation<strong>de</strong> la ligne <strong>de</strong> champ lorqu’on s’éloigne <strong>de</strong> la paroi).Pour assurer la compatibilité avec <strong>de</strong>s isobares(i) planes dans les tubes droits, (ii) sphériques dans lescônes, (iii) orthogonales à la paroi, (iv) quasi-sphériquesdans les pavillons [7], (v) sans les supposer figées, onretient l’hypothèse suivante : à la paroi, une isobares’éloigne lentement <strong>de</strong> son approximation sphérique tangente.Plus précisément, en notant ζ(s,u,t) l’écart relatif(cf. [22]), on a ∂uζ(s,u=w,t) k = 0 pour k = 0(contact)et k=1(tangence). En supposant la validité pour k=2(éloignement plus lent qu’une parabole), on obtient queγ(s,w,t). Ceci conduit à l’équation <strong>de</strong> Websterα(s,w,t) = (s)2R′ R(s)(∂l 2 +2 R′ (l)R(l) ∂ l − 1 )c 2∂2 t p(l,t) = 0, (3)si s=l est l’abscisse curviligne mesurant la longueur surla paroi (α(s,u=w,t) = 1).1.4 Paroi à admittance <strong>de</strong> CremerEn présence <strong>de</strong> pertes visco-thermiques, l’orthogonalité<strong>de</strong>sisobaresàlaparoin’estplusvali<strong>de</strong>.Silescoucheslimites sont d’épaisseur faible <strong>de</strong>vant R(l) et le rayon <strong>de</strong>courbure <strong>de</strong> ce profil, cette perturbation peut être estiméeen approchant l’action <strong>de</strong> la paroi par son admittance<strong>de</strong> Cremer [16]. L’hypothèse <strong>de</strong> coïnci<strong>de</strong>nce localeà l’ordre 2 <strong>de</strong> l’isobare et sa sphère tangente conduit àune version perturbée <strong>de</strong> (3) donnée par [22, 10](∂ 2 l +2 R′ (l)R(l) ∂ l − 1 c 2∂2 t − 2ε(l)c 3 2∂ 3 2t)p(l,t) = 0, (4)où ∂ 3 2t est une dérivée fractionnaire [20] et ε(l) =κ 0√1−R ′ (l) 2R(l)quantifie les effets visco-thermiques (κ 0 =√l′ v +(γ−1) √ l h ≈3×10 −4 m 1/2 dansl’air).Cetteéquationest dite <strong>de</strong> Webster(cas ε = 0)-Lokhin(cas R ′ = 0).1.5 Modèle complet, propriétés, validitéOn considère ici la propagation dans l’espace <strong>de</strong>sisobares redressées, sous l’hypothèse <strong>de</strong> leur quasisphéricitéà la paroi, avec pertes, modélisée par(∂ 2 l −[ 1c 2∂2 t + 2ε(l)c 3 2∂ 3 2t +Υ(l)]) [R(l)p(l,t) ]= 0 (5)ρ∂ t v(l,t)+∂ l p(l,t) = 0 (6)
où Υ = R ′′ /R. Si R est <strong>de</strong>ux fois dérivable, (5) équivautà (4). Hors <strong>de</strong> la couche limite, la vitesse particulaireest colinéaire au gradient <strong>de</strong> pression : elle satisfaitl’équation d’Euler dont on tire (6) après projection.Propriétés du changement <strong>de</strong> coordonnée z→lPour une <strong>de</strong>scription <strong>de</strong> perce z ↦→ r(z), la lon-<strong>de</strong> la paroi mesurée <strong>de</strong>puis z = 0 est L(z) =∫gueurz√1+r′ (z)02 dz dont on tire R(l) = r ( L −1 (l) ) . Endérivant l’expression R(L(z)) = r(z), on trouve queR ′ (L(z)) = r ′ (z)/ √ 1+r ′ (z) 2 . On a donc les propriétéssuivantes, inhabituelles pour (3-6) : (i) |R ′ (l)| ≤ 1;(ii) R ′ (l) = 1 correspond à une pente verticale. Notonsqu’un tube droit reconduit bien aux équations gouvernantles on<strong>de</strong>s planes (R ′ /R = 0, l = z), et un cônereconduit aux on<strong>de</strong>s sphériques (2R ′ /R = 2/l). Si uneperce finit par une pente verticale, le modèle opère unrecollage naturel avec une solution en on<strong>de</strong>s sphériques.Validité Le modèle sans perte (3) est exact si Υ=0.Il fournit une approximation intéressante si |Υ| est suffisammentfaible ou si les fréquences sont suffisammentbasses (voir [23] pour une analyse précise). L’hypothèse1D est conditionnée par l’absence <strong>de</strong> mo<strong>de</strong>s transverses,qu’on caractérise parf < K + (R max ) −1 avec K + = 1.84c2π ≈ 631.8m.s−1 .Lemodèle<strong>de</strong>spertessupposequel’épaisseur<strong>de</strong>scoucheslimites est faible <strong>de</strong>vant le rayon R et le rayon <strong>de</strong> cour-√bure R c donné par (1+R′ (z) 2 ) 23R ′′ (z)si s=z et par 1 1−R′ (l) 2R ′′ (l)si s=l. La condition la plus contraignante vient <strong>de</strong> lacouche visqueuse. Elle se traduit par (cf. e.g. [13, p212])f > K − (R min ) −2 avecK − = µ2πρ ≈ 2.39×10−6 m 2 .s −1 .2 Solutions exactes pour <strong>de</strong>sgéométries paramétrées2.1 Propagation à coefficients constantsProfils admissibles et régularité Dans le domaine<strong>de</strong> Laplace (variable s) et pour <strong>de</strong>s conditions initialesnulles, les équations (5-6) se récrivent[( (sc) 2+2ε(l) ( sc)32+Υ(l)){ }−∂l] 2 R(l)P(l,s) = 0, (7)ρs U(l,s)S(l)+∂ l P(l,s) = 0, (8)où U(l,s)=S(l)V(l) avec S(l)=πR(l) 2 . Ces équationsse résolvent analytiquement si ε et Υ sont constants.Puisque R ′′ (l)−Υ(l)R(l)=0, les profils à Υ constantsont <strong>de</strong> la forme (avec (A,B) ∈ R 2 )R(l) = Acos( √ −Υl)+Bsin( √ −Υl), si Υ < 0,R(l) = A+Bl, si Υ = 0,R(l) = Acosh( √ Υl)+Bsinh( √ Υl), si Υ > 0.Ces familles peuvent être décrites par la forme unifiéeR(l) = AC Υ (l)+BS Υ (l), (9)1. Remarque : on vérifie que ε(l) = κ 0 R c(l)Υ(l) (si Υ ≠ 0).où (Υ,l) ↦→ C Υ (l) = φ 1(Υl2 ) et (Υ,l) ↦→ S Υ (l) =lφ 2(Υl2 ) sont <strong>de</strong>s fonctions infiniment dérivables,construites à partir <strong>de</strong>s fonctions analytiques sur Cφ 1 : z ↦→φ 2 : z ↦→+∞∑k=0+∞∑k=0z k(2k)!z k(2k +1)!((= cosh √ z),= sinh√ z)√ pour z ≠ 0 . zExcepté le cas où R est constant, cette famille <strong>de</strong>profils ne conduit pas à une fonction ε constante. Aussi,pourunintervalle[0,L]suffisammentcourt,onapproche∫ε par sa valeur moyenne ε(l) ≈ 1 LLε(l)dl. Ceci définit0un tronçon dont le profil géométrique est décrit par les4 paramètres {A,B,Υ,L} et dans lequel la propagationest caractérisée par les constantes Υ, ε et c.Matrice <strong>de</strong> transfert acoustique d’un tronçonEn notant X l (s)= [ P(l,s),U(l,s) ] T, une résolution analytique<strong>de</strong> (7-8) avec Υ et ε constants sur [a,b] conduit àX b (s) = T b,a (s)X a (s),où T b,a (s)=diag ( LR(b) , πR(b) )ρs Mb,a (s)diag ( R(a)L , )ρsπR(a)est une matrice <strong>de</strong> déterminant 1 et, en notant ∆(z) =[coshz, (sinhz)/z] T ,[M b,a (s)] 11= [1 , σ a ] ∆ ( LΓ(s) ) ,[M b,a (s)] 12= [0 , −1] ∆ ( LΓ(s) ) ,[[M b,a (s)] 21= σ b −σ a , σ a σ b −(LΓ(s)) 2] ∆ ( LΓ(s) ) ,[M b,a (s)] 22= [1 , −σ b ]∆ ( LΓ(s) ) ,où Γ(s) est une racine carrée <strong>de</strong> ( s 2 ( )3c)+ 2εs 2c+ Υ,σ l = R′ (l)R(l)/L<strong>de</strong>finit une pente normalisée avec L=b−a.2.2 Jonctions <strong>de</strong> tronçons à régularité C 1Concaténation <strong>de</strong> tronçons et contraintes <strong>de</strong>régularité Nous considérons la jonction à régularitéC 1 <strong>de</strong> N tronçons <strong>de</strong> longueurs L n (paramètres laisséslibres). Le profil complet décrit par les 4N paramètres{A n ,B n ,Υ n ,L n } n∈[1,N] est donné parR(l) =N∑R n (l)1 [ln−1,l n[(l), ∀l ∈ [l 0 ,l N ] (10)n=1∑avec R n (l) = A n C Υn (l) + B n S Υn (l) et {l n =nk=1 L n} 0≤n≤N où l 1 ,...l N−1 sont les abcisses <strong>de</strong>spoints <strong>de</strong> raccor<strong>de</strong>ment entre tronçons.Lacondition<strong>de</strong>régularitéC 1 auxjonctionss’exprimepar les 2(N −1) contraintes d’égalité suivantes :{Rn (l∀n ∈ [1,N −1], n ) = R n+1 (l n ),R n(l ′ n ) = R n+1(l ′ (11)n ).On remarque que R est linéaire en les paramètres A n etB n . L’ensemble <strong>de</strong> ces équations forme donc un systèmelinéaire (<strong>de</strong> dimension 2(N−1)) en les (2N) paramètres{A n , B n } 1≤n≤N . En faisant le choix <strong>de</strong> représenter les<strong>de</strong>ux <strong>de</strong>grés <strong>de</strong> liberté par {A 1 , B 1 }, la résolution analytiquedu système conduit à <strong>de</strong>s solutions <strong>de</strong> la forme[A n ,B n ] T = Q n [A 1 ,B 1 ] T pour 2 ≤ n ≤ N (cf. [24]).
Le nombre <strong>de</strong> <strong>de</strong>grés <strong>de</strong> liberté d’un tel profil à Ntronçons vaut donc 4N−2(N− 1) = 2N+2. Avec leschoix faits ci-<strong>de</strong>ssus, les paramètres libres sont A 1 , B 1et {Υ n ,L n } 1≤n≤N .Matrice <strong>de</strong> tansfert globale Dupoint<strong>de</strong>vueacoustique,le raccord <strong>de</strong> <strong>de</strong>ux tronçons est réalisé en écrivantla continuité <strong>de</strong> l’état acoustique X l à la jonction. Cettecontinuité fait sens au moins dès que 2 le raccord està régularité C 1 . En itérant ce procédé pour raccor<strong>de</strong>rsuccessivement les tronçons, on trouve que X lN (s) =T lN,l 0(s)X l0 (s) avecT lN,l 0= T lN,l N−1T lN−1,l N−2... T l1,l 0. (12)On retrouve le formalisme standard en produits <strong>de</strong> matrices<strong>de</strong> transfert comme dans le cas du raccor<strong>de</strong>ment<strong>de</strong> tubes droits sous l’hypothèse d’on<strong>de</strong>s planes (cf. e.g.[13, p.293]).3 Estimation <strong>de</strong> la géométrieOn s’intéresse ici à un profil <strong>de</strong> régularité C 1 , <strong>de</strong> longueurL, pour lequel Υ n’est pas constant a priori.3.1 Cible et objectifEn pratique, une perce est généralement décrite parun relevé <strong>de</strong> M +1 points, <strong>de</strong> la forme ( z m ,r(z m ) )ou ( l m ,R(l m ) ) . Souvent, le maillage spatial n’est pasrégulier : le fabricant ou le luthier ajustent la finesse dupas du relevé pour que son interpolation affine par morceauxfournisse une <strong>de</strong>scription suffisamment fidèle pourreproduire la perce. Pour ce choix d’interpolation, lesconversions exactes z↔l sont immédiates et préserventletyped’interpolation. Mais, larégularité C 1 estperdue.On considère ici qu’on dispose d’une telle interpolationl ↦→ R(l), affine par morceaux, continue,construite à partir d’un relevé <strong>de</strong> points d’un profil cibleà régularité initialement C 1 . L’objectif est <strong>de</strong> représenterle profil original par le modèle (10-11) avec un nombreN <strong>de</strong> tronçons significativement inférieur à M, visant à1. regénérer une version C 1 du profil,2. disposer d’une <strong>de</strong>scription du profil fiable et à peu<strong>de</strong> paramètres,3. profiterduformalisme(12)aveclaprécisionoffertepar le modèle <strong>de</strong> Webster-Lokshin,4. disposer d’une <strong>de</strong>scription analytique à peu <strong>de</strong> paramètres<strong>de</strong> l’acoustique du résonateur.3.2 Distance et paramètres libresA la différence <strong>de</strong>s splines dont les paramètres sontcontrôlés par les points <strong>de</strong> jonctions (<strong>de</strong> “tronçons polynomiaux”),on souhaite rendre, globalement sur l ∈[0,L], la cible interpolée R et le modèle R aussi prochesque possible. On choisit <strong>de</strong> mesurer cette proximité sur[0,L] par la déviation quadratique moyenne standardd L (R,R) = 1 L∫ L0(R(l)−R(l)) 2dl.2. Voir [22, p.66] pour une discussion <strong>de</strong> la compatibililité <strong>de</strong>cette hypothèse avec celle <strong>de</strong> quasi-sphéricité <strong>de</strong>s isobares.Puisque R est affine par morceaux et R <strong>de</strong> la forme (9)par morceaux, cette integrale s’exprime analytiquementen fonction <strong>de</strong> ( l m ,R(l m ) ) et <strong>de</strong>s paramètres du0≤m≤Mmodèle R à N tronçons (10-11). Cette expression estutilisée pour éviter le calcul numérique <strong>de</strong> l’intégrale etaccélérer significativement l’algorithme d’optimisation.Parmi les 2N+2 paramètres libres du modèle R, unepartiepeutêtrereservéepourminimiserd L (R,R)etuneautre pour résoudre <strong>de</strong> nouvelles contraintes telles queN∑1 préservation <strong>de</strong> la longueur totale : L n = L.n=1k (0 ≤ k ≤ 4) conditions aux extrémités <strong>de</strong> la formeF(l c )=F(l c ) avec F=R ou R ′ et l c =0 ou L.Le nombre <strong>de</strong> <strong>de</strong>grés <strong>de</strong> liberté <strong>de</strong> R <strong>de</strong>vient 2N+1−k.Une manière simple <strong>de</strong> contraindre la longueur totaleest <strong>de</strong> remplacer L N par L − ∑ N−1n=1 L n dans R.Une manière simple d’imposer <strong>de</strong>ux conditions auxextrémités(k=2)est<strong>de</strong>résoudreleproblèmelinéaireassocié,en les paramètres {A 1 ,B 1 }. Dans ce cas, les 2N−1paramètres libres restants sont donnés par le vecteurθ = [Υ 1 ,...Υ N ,L 1 ,...L N−1 ] T ,dont dépend le profil modèle qu’on note alors R θ et lecritère associé à minimiser est donné parC L (θ) = d L (R,R θ ).Dans la suite, nous considérons ce cas avec lescontraintes d’égalité R(0) = R(0) et R ′ (0) = R ′ (0).3.3 AlgorithmeLa minimisation <strong>de</strong> C L est un problème non linéaireet non convexe. Pour obtenir une solution satisfaisanteà partir d’algorithmes d’optimisation numérique standard3 , nous adoptons la solution pragmatique suivante.Initialisation :– Initialiser θ par Υ 1 = ··· = Υ N = 0 etL 1 = ··· =L N =L/N <strong>de</strong> sorte que l n =nL/N (ouvaleurs données par l’utilisateur, cf. perspectives),– Minimiser C l1 (θ)enΥ 1 ;mettreàjourθ ( [θ] 1 ←Υ ⋆ 1).Itérations pour n allant <strong>de</strong> 2 à N : Minimisation<strong>de</strong> C ln (θ) selon1. la variable Υ n (mise à jour <strong>de</strong> θ),2. puis, les variables Υ 1 ,...Υ n (i<strong>de</strong>m),3. puis, les variables Υ 1 ,...Υ n ,L 1 ,...L n−1 avecL n = l n − ∑ n−1k=1 L k (i<strong>de</strong>m).En pratique, ces étapes conduisent à une solutionproche <strong>de</strong> l’optimum global. Si l’on souhaite avoir <strong>de</strong>scontraintes à droite (F(L) = F(L)), on ajoute une<strong>de</strong>rnière étape. Le modèle n’étant linéaire en aucun<strong>de</strong>s paramètres [θ] k , la résolution du lagrangien associéserait délicate. On pénalise le critère en ajoutant <strong>de</strong>stermes du type ǫ ( F(L)−F(L) ) 2. On fait croître ǫ > 0jusqu’à ce que l’erreur commise sur la contrainte soitplus faible qu’un seuil fixé.3. Ici, nous avons utilisé les fonctions (sous Matlab) fminbndpour les optimisations selon une variable et fminsearch pour lesoptimisations selon plusieurs variables.
4 Applications et comparaisonsNous considérons les trois profils cibles suivants :R 1 (l)=0.3l 3 −0.45l 2 +0.194l+0.0075, R 2 (l)=0.0025+l 4polynômes à partir <strong>de</strong>squels les <strong>de</strong>scriptions R 1 et R 2affines par morceaux sont générées (pas <strong>de</strong> 1mm) et la<strong>de</strong>scription R 3 d’un trombone à partir d’un relevé <strong>de</strong>perce 4 . Ces profils tracés en figure 1 satisfont |R ′ k| < 1.R 1 (l) (en m)R 2 (l) (en m)R3(l) ou r(z) (en m)0.10.080.060.040.0200.060.050.040.030.020.0100.10.080.060.040.020l (en m)0 0.2 0.4 0.6 0.8 1 1.2l0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5l ou z (en m)0 0.5 1 1.5 2 2.5Figure 1 – Profils <strong>de</strong> test R k (-). Pour R 1 et R 2 :exemples d’approximation optimale avec 2 et 4 ou 6tronçons (- -+ et - -o). Perce originale r 3 (z) (- · -),R 3 (l) (-) et approximation avec 11 tronçons (- -o).Profil R 1 Sur la figure 1, on peut observer lesrésultats <strong>de</strong> l’algorithme (avec les 4 contraintes auxextrémités) pour N = 2 et N = 4 ou N = 6 tronçons(les jonctions sont localisés par les marqueurs + ou o).Pour illustrer les performances <strong>de</strong> l’algorithme, lafigure 2 présente les erreurs normalisées moyennes(-o)E moy2 = √ d L (R 1 ,R ∣ 1 )/‖R 1 ‖ 2 et maximales(-·-o)E2 max = max l∈[0,L] R 1 (l)−R(l) ∣ ∣/‖R 1 ‖ 2 pour N ∈{3,4,5,6}, avec contrainte sur R(l) et R ′ (l).avec la variante 2 (qui réduit considérablement le temps<strong>de</strong> calcul <strong>de</strong> l’optimisation).Profil R 2 Ce profil évasé a été approché par 128tubes droits (R a 2, L n = L/128), 64 cônes (R b 2, L n =L/64), 2 et 4 tronçons (R c 2 et R d 2) aux paramètres optimisés(figure 1). Après calcul <strong>de</strong>s matrices <strong>de</strong> transfertglobales et concaténation en l=L avec l’impédancebouchon idéalement nulle, on trouve les impédancesd’entrée données en figure 3. Ces impédances sontà comparer à la référence obtenue par résolutionnumérique 5 <strong>de</strong> (7-8). On observe que <strong>de</strong>ux tronçons40200−200 1000 2000 3000 4000 5000 600040référence20R2 b (cônes)0−200 1000 2000 3000 4000 5000 600040référence20R2 c (N=2)0−200 1000 2000 3000 4000 5000 600040référence20R2 d (N=4)0−200 1000 2000 3000 4000 5000 6000f (en Hz)référenceR a 2 (cylindres)Figure 3 – Module (en dB) <strong>de</strong>s impédances d’entréecalculées pour les profils R b 2 (-·-), R c 2 (-·-) et R d 2 (-·-),comparées à la référence (-).sont insuffisants pour obtenir <strong>de</strong>s résultats fiablesmais que 4 tronçons (soit 16 paramètres géométriques{A n ,B n ,Υ,L n } 1≤n≤4 ) donnent <strong>de</strong>s résultats déjà satisfaisantstant géométriquement que pour l’impédance.Profil R 3 L’impédance d’entrée d’un trombone avecune embouchure a été mesurée (figure 4). CetteE moyet E max2 2max10 −110 −2Nombre <strong>de</strong> tronçons N3 3.5 4 4.5 5 5.5 6Figure 2 – Profil R 1 : erreurs E moy2 et E max2 .Pour illustrer l’intérêt <strong>de</strong>s étapes, on représenteles erreurs E moy2 (-) et E2 max (-·-) pour plusieursversions <strong>de</strong> l’algorithme. Si l’étape 3 est retirée (variante1, courbes +), les erreurs sont très supérieures.Ceci confirme l’intérêt d’optimiser les longueurs L n . Sil’étape 3 n’est réalisée qu’à la <strong>de</strong>rnière itération n=N(variante 2, x), on améliore les résultats <strong>de</strong> la variante 1mais sans retrouver la qualité originale : l’optimiseurnumérique atteint un minimum local moins bon.Un travail sur l’initialisation pourrait améliorer tousces résultats et permettre <strong>de</strong> retrouver la même qualité4. Nous remercions R. Caussé <strong>de</strong> nous avoir fourni ces données.|Z| (en dB)|Z| (en dB)|Z| (en dB)|Z| (en dB)3020100−103020100−103020100−1030201000 100 200 300 400 500 600 700 800 900 1000 1100−100 100 200 300 400 500 600 700 800 900 1000 1100f (en Hz)Impédance mesuréeImpédance calculée N=11Impédance calculée N=5Impédance mesuréeExtrema <strong>de</strong> la mesureExtrema pour N=11Extrema pour N=5Figure 4 – Impédance d’entrée mesurée sur untrombone et versions calculées pour N=11, N=5 etcomparaisons (voir [25] pour plus <strong>de</strong> détails).impédance a été calculée à partir du formalisme (12) enconsidérant la matrice <strong>de</strong> transfert d’une embouchure5. La fonction utilisée est o<strong>de</strong>23 sous Matlab.
simplifiée (masse, compliance et résistance acoustique,cf. [26]) et l’impédance <strong>de</strong> rayonnement d’une sphèredont la partie inscrite dans le cône tangent au profil enl=L est pulsante [27, Modèle (M2)].5 Conclusion et perspectivesLe calcul <strong>de</strong> matrices <strong>de</strong> transfert par concaténation<strong>de</strong>tronçons<strong>de</strong>tubesàR ′′ /Rconstantaétérappelépourle modèle <strong>de</strong> propagation dit <strong>de</strong> “Webster-Lokshin” àabscisse curviligne. Un algorithme qui détermine les paramètresgéométriques <strong>de</strong>s tronçons optimisés pour approcherune cible à régularité C 1 a été proposé. Grâceà cet algorithme, le modèle géométrique génère <strong>de</strong>sreprésentations satisfaisantes <strong>de</strong> cibles avec peu <strong>de</strong> paramètres.De plus, lorsque la cible est bien approchée,lesimpédancesacoustiquescalculéessontfiables<strong>de</strong>sorteque l’outil complet pourrait s’intégrer à terme dans uneplateforme d’ai<strong>de</strong> à la lutherie (en particlulier pour lespavillons). Enfin, ces représentations permettent aussi<strong>de</strong> construire <strong>de</strong>s simulations temps réel (<strong>de</strong> type gui<strong>de</strong>d’on<strong>de</strong>s) pour la synthèse sonore [25].Parmi les perspectives, <strong>de</strong>s discontinuités <strong>de</strong> profils,la présence <strong>de</strong> trous, clapets (etc), entre chaque zoneC 1 optimisée pourrait être intégrées en définissant <strong>de</strong>sraccords à volume nul et en introduisant <strong>de</strong>s massesajoutées suivant le principe donné par exemple dans [13,p.302-332]. Par ailleurs, un travail sur les paramètresd’initialisation <strong>de</strong> l’algorithme proposé en 3.3 pourraitpermettre d’accélérer l’optimisation sans dégra<strong>de</strong>rles résultats, en n’exécutant l’étape 3 qu’à la <strong>de</strong>rnièreitération. Enfin, la représentation à peu <strong>de</strong> paramètresd’une perce <strong>de</strong>vrait permettre d’envisager une optimisationsur <strong>de</strong>s impédances (ou immitance) cibles oud’autres critères acoustiques, et plus seulement sur uncritère géométrique.RemerciementsLesauteursremercientJ.Kergomar<strong>de</strong>tD.Matignonpour les renseignements bibliographiques et P.-D. Dekoninckpour les travaux initiaux sur l’estimation <strong>de</strong> profilsgéométriques. Ce travail fait partie du projet ANRConsonnes.Références[1] J. L. Lagrange. Nouvelles recherches sur la nature et lapropagation du son. Misc. Taurinensia (Mélanges Phil.Math., Soc. Roy. Turin), 1760-1761.[2] D. Bernoulli. Sur le son et sur les tons <strong>de</strong>s tuyauxd’orgues différemment construits. Mém. Acad. Sci. (Paris),1764.[3] A. G. Webster. Acoustical impedance, and the theoryof horns and of the phonograph. Proc. Nat. Acad. Sci.U.S., 5 :275–282, 1919. Errata, ibid. 6, p.320 (1920).[4] E.Eisner. CompletesolutionsoftheWebsterhornequation.J. Acoust. Soc. Amer., 41(4) :1126–1146, 1967.[5] R. F. Lambert. Acoustical studies of the tractrix horn.I. J. Acoust. Soc. Amer., 26(6) :1024–1028, 1954.[6] E. S. Weibel. On Webster’s horn equation. J. Acoust.Soc. Amer., 27(4) :726–727, 1955.[7] A. H. Bena<strong>de</strong> and E. V. Jansson. On plane and sphericalwaves in horns with nonuniform flare. I. Theory ofradiation, resonance frequencies, and mo<strong>de</strong> conversion.Acustica, 31 :79–98, 1974.[8] G. R. Putland. Every one-parameter acoustic fieldobeys Webster’s horn equation. J. Audio Eng. Soc.,6 :435–451, 1993.[9] J. Agulló, A. Barjau, and D. H. Keefe. Acoustic propagationinflaring,axisymmetrichorns:I.Anewfamilyofunidimensional solutions. Acustica, 85 :278–284, 1999.[10] Thomas Hélie. Mono-dimensional mo<strong>de</strong>ls of the acousticpropagation in axisymmetric wavegui<strong>de</strong>s. J. Acoust.Soc. Amer., 114 :2633–2647, 2003.[11] G. Kirchhoff. Ueber die einfluss <strong>de</strong>r wärmeleitung ineinem gase auf die schallbewegung. Annalen <strong>de</strong>r PhysikLeipzig, 134, 1868. (English version : R. B. Lindsay,ed., PhysicalAcoustics, Dow<strong>de</strong>n, Hutchinson and Ross,Stroudsburg, 1974).[12] M. Bruneau, P. Herzog, J. Kergomard, and J.-D. Polack.General formulation of the dispersion equationboun<strong>de</strong>d visco-thermal fluid, and application to somesimple geometries. Wave motion, 11 :441–451, 1989.[13] A. Chaigne and J. Kergomard. Acoustique <strong>de</strong>s instruments<strong>de</strong> musique. Belin, 2008.[14] J. Kergomard. Champ interne et champ externe <strong>de</strong>sinstruments à vent. PhD thesis, Université Pierre etMarie Curie, 1981.[15] J. Kergmard. Comments on wall effects on sound propagationin tubes. J. Sound Vibr., 98(1) :149–153, 1985.[16] L. Cremer. On the acoustic boundary layer outsi<strong>de</strong> arigid wall. Arch. Elektr. Uebertr. 2, 235, 1948.[17] A. A. Lokshin. Wave equation with singular retar<strong>de</strong>dtime. Dokl. Akad. Nauk SSSR,240:43–46,1978. (russe).[18] A. A. Lokshin and V. E. Rok. Fundamental solutionsof the wave equation with retar<strong>de</strong>d time. Dokl. Akad.Nauk SSSR, 239 :1305–1308, 1978. (russe).[19] J.-D. Polack. Time domain solution of Kirchhoff’s equationfor sound propagation in viscothermal gases : a diffusionprocess. J. Acoustique, 4 :47–67, 1991.[20] D. Matignon. Représentations en variables d’état <strong>de</strong>modèles <strong>de</strong> gui<strong>de</strong>s d’on<strong>de</strong>s avec dérivation fractionnaire.PhD thesis, Université <strong>de</strong> Paris XI Orsay, 1994.[21] D.Matignon andB.d’AndréaNovel. Spectraland timedomainconsequences of an integro-differential perturbationof the wave PDE. In Int. Conf. on mathematicaland numerical aspects of wave propagation phenomena,volume 3, pages 769–771. INRIA-SIAM, 1995.[22] Thomas Hélie. Modélisation physique d’instruments <strong>de</strong>musique en systèmes dynamiques et inversion. Thèse <strong>de</strong>doctorat, Université <strong>de</strong> Paris XI - Orsay, Paris, 2002.[23] S. Rienstra. Webster’s horn equation revsisted. SIAMJ. Apll. Math., 65(6) :1981–2004, 2005.[24] Thomas Hézard. Construction <strong>de</strong> famille d’instrumentsà vent virtuels. Projet <strong>de</strong> fin d’étu<strong>de</strong>s d’ingénieur, EcoleNationale Supérieure <strong>de</strong> l’Electronique et <strong>de</strong> ses Applications,Cergy-Pontoise, 2009.[25] RémiMignot. Réalisation en gui<strong>de</strong>s d’on<strong>de</strong>s numériquesstables d’un modèle acoustique réaliste pour la simulationen temps-réel d’instruments à vent. Thèse <strong>de</strong> doctorat,Edite <strong>de</strong> Paris - Telecom ParisTech, Paris, 2009.[26] N H. Fletcher and T. D. Rossing. The Physics of MusicalInstruments. Springer-Verlag,NewYork,USA,1998.[27] Thomas Hélie and Xavier Ro<strong>de</strong>t. Radiation of a pulsatingportion of a sphere : application to horn radiation.Acta Acustica, 89 :565–577, 2003.