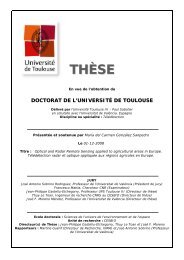
Chapitre 2. Principes de l’imagerie radar à synthèse d’ouverturerésolution géométrique qui est dégradée d’un facteur L également. Cette valeur L, qui estalors appelée nombre de vues, est donc généralement limitée à L=3 ou 4.Notons que pour le cas où les L échantillons sont corrélés, la réduction de la variance duspeckle se fait d’un facteur inférieur à L.Dans le cas d’une image L-vues, on peut montrer que la distribution statistique de l’intensitéest une loi Gamma à deux paramètres R et L :L⎛ L ⎞ 1 ⎛ LI ⎞ −1( ) exp⎜−LpII R = ⎜ ⎟⎟.I(II-10)⎝ R ⎠ Γ(L)⎝ R ⎠où Γ(L) représente la fonction Gamma : ∫ ∞ x−1−tΓ( x)= t e dt .La Figure 9 montre la densité de probabilité de l’intensité pour une cible de réflectivité 0,5pour plusieurs valeurs du nombre de vues réparties de 1 à 100. Elle indique que la variance estconsidérablement réduite quand le nombre de vues augmente, ce qui réduit d’autant laprobabilité d’erreur d’estimation de la réflectivité R.0Densité de probabilité de l'intensité98765432L=1L=3L=10L=25L=50L=1001Figure 9.R=0,500 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1IntensitéDistribution du speckle en intensité pour une image L-vues de réflectivitéLe nombre de vues que la technique multi-vue permet d’atteindre (typiquement, moins de 10vues) n’est pas assez élevé pour un certain nombre d’applications. On peut aussi augmenterartificiellement le nombre de vues par des techniques de filtrage. Ces procédés permettentd’obtenir des images avec un nombre équivalent de vues plus élevé que le nombre de vuesinitial. Cette notion de nombre de vues équivalent, noté ENL (pour Equivalent Number of57
Chapitre 2. Principes de l’imagerie radar à synthèse d’ouvertureLooks), se définit comme étant le rapport de la moyenne en intensité au carré sur la variance2Mde l’intensité : ENL = .σCette grandeur peut être directement reliée au coefficient de variation CV del’intensité : CV1= σ = .M ENL2.5.3. Les techniques de filtrage pour réduire le speckleDepuis l’émergence des premiers SARs, de nombreuses méthodes de filtrage visant à réduirel’effet du speckle ont été développées. La quasi-totalité de ces filtres sont dits adaptatifs,c’est-à-dire qu’ils ne traitent pas l’image dans sa globalité, mais pixel par pixel à partir d’unefenêtre glissante, sur laquelle le signal est supposé stationnaire et qui constitue un voisinagepermettant d’estimer localement un certain nombre de grandeurs statistiques (moyenne,variance, corrélation). Les premières méthodes fonctionnaient surtout avec des fenêtrescarrées, d’une taille typique variant de 7×7 pour les images multi-vues à 11×11 pour lesimages mono-vue. Au cours des dernières années, des algorithmes de détection de structures(points, lignes, contours) ont été développés et permettent, par une segmentation de la fenêtreinitiale, d’utiliser des fenêtres variables dont la forme change d’un pixel à l’autre en fonctionde la scène, ce qui permet de mieux respecter la condition de stationnarité du signal et demieux préserver les détails de la scène.La plupart des filtres développés sont appliqués sur une seule image à la fois, et sont donc ditsmono-canal. Le plus simple d’entre eux est le filtre moyenne, qui consiste à attribuer à unpixel la moyenne de l’intensité des pixels situés dans la fenêtre centrée sur lui. Ce filtre,utilisé le plus souvent sans détection de structure, est efficace sur les zones homogènes maisne permet pas de préserver les détails de l’image. D’autres filtres ont été développés pouraffiner la réduction du speckle. L’opération de filtrage consiste alors à estimer la réflectivité Rde la cible en fonction de l’intensité I du pixel traité et des paramètres estimés localementdans la fenêtre centrée sur le pixel. A partir de cette combinaison (linéaire ou non) entre I etles paramètres locaux, on peut estimer R en utilisant un critère statistique. Le critère le plusemployé est la minimisation de l’erreur quadratique moyenne, noté MMSE pour MinimumMean Square Error, comme c’est le cas par exemple pour les filtres de Lee (1980) et Kuan etal. (1985), qui prennent pour estimation de R une combinaison linéaire entre I et sa moyennesur la fenêtre de voisinage, et pour le filtre de Frost et al. (1982), qui estime R à partir de la58