- Page 2 and 3:
Wirawan Sumbodo, dkk. TEKNIK PRODUK
- Page 4 and 5:
Kata Sambutan Puji syukur kami panj
- Page 6 and 7:
Kata Sambutan .....................
- Page 8 and 9:
BAB VIII SISTEM PNEUMATIK DAN HYDRO
- Page 10 and 11:
4. Efektifi tas Pneumatik Sistim ge
- Page 12 and 13:
• Mudah dimanfaatkan, udara mudah
- Page 14 and 15:
dilengkapi dengan katup pengaman, b
- Page 16 and 17:
pendinginan dengan memasang sistem
- Page 18 and 19:
7.1.1.5 Kompresor Sekrup (Screw) Ko
- Page 20 and 21:
7.1.1.9 Kompresor Aliran Aksial Pad
- Page 22 and 23:
7.2.1 Peralatan Pengolahan Udara Be
- Page 24 and 25:
Udara Basah Udara Kering Air Konden
- Page 26 and 27:
7.3 Pemeriksaan Udara Kempa dan Per
- Page 28 and 29:
7.5 Katup-Katup Pneumatik Katup ber
- Page 30 and 31:
Gambar 26. Katup 3/2 Knop Pembalik
- Page 32 and 33:
7.5.2.2 Shuttle Valve Katup ini aka
- Page 34 and 35:
7.5.8 Time Delay Valve (Katup Penun
- Page 36 and 37:
Silinder Pneumatik sederhana terdir
- Page 38 and 39:
Gambar 43. Rotari Vane Motor Menuru
- Page 40 and 41:
Simbol penekan katup sinyal memilik
- Page 42 and 43:
katup pengendalian. Beberapa katup
- Page 44 and 45:
7.8.4 Katup Pengatur Aliran (Flow C
- Page 46 and 47:
pada posisi OFF maka outputnya akan
- Page 48 and 49:
7.8.5.1 Katup Kendali 5/2 penggerak
- Page 50 and 51:
akan menjadi magnet. Magnet ini aka
- Page 52 and 53:
mengurangi keausan pada peralatan p
- Page 54 and 55:
Katup sinyal akan menghasilkan siny
- Page 56 and 57:
Gambar 52. Sistim Tekanan dalam Pne
- Page 58 and 59:
Dimana: F = Gaya torak (N) P e = Te
- Page 60 and 61:
10. Analisis Kerja Sistim Pneumatik
- Page 62 and 63:
Gambar 61. Rangkaian dan Diagram Ge
- Page 64 and 65:
Sistim gerak silinder penggerak gan
- Page 66 and 67:
= Katup 5/2 dengan kontrol full pne
- Page 68 and 69:
11.1.2 Untuk Saluran 1.2 (X) Persam
- Page 70 and 71:
11.1.4 Diagram Karnought Gambar 69.
- Page 72 and 73:
Gambar 71. Menutup pintu bus dengan
- Page 74 and 75:
Gambar 74. Menutup pintu bus dengan
- Page 76 and 77:
Gambar 76. Menutup pintu bus dengan
- Page 78 and 79:
naiknya stang torak ke atas (A+) se
- Page 80 and 81:
saluran 1 akan terhubung dengan 4 d
- Page 82 and 83:
ekerja. Oleh karena itu diperlukan
- Page 84 and 85:
• Penghanyut bram/chip yaitu part
- Page 86 and 87:
14.1.2.2 Cairan Hydroik tahan Api (
- Page 88 and 89:
• Saybolt Universal; satuan visko
- Page 90 and 91:
14.1.3.2 Viscosity margins Maksud d
- Page 92 and 93:
14.1.3.3 Viskometer VisKometer adal
- Page 94 and 95:
meningkat pula viscosity index. Gam
- Page 96 and 97:
Gambar 85. Pompa Hydrolik Sirip Bur
- Page 98 and 99:
mekanik melalaui stang torak. Gerak
- Page 100 and 101:
Gambar 93. Macam-macam model katup
- Page 102 and 103:
2. Bila luas penampang A 1 pada gam
- Page 104 and 105:
16.3 Pemeliharaan Cairan Hydrolik C
- Page 106 and 107:
3. Penyedotan terjadi karena adanya
- Page 108 and 109:
16.8 Bent Axis Piston Pump (Pompa T
- Page 110 and 111:
Ukuran tangki hydrolik berkisar ant
- Page 112 and 113:
Contoh: Ukuran pompa yang baru , ke
- Page 114 and 115:
10o -15oC dibawah suhu permulaan me
- Page 116 and 117:
Secara garis besar urutan kerja sis
- Page 118 and 119:
BAB IX PROSES PRODUKSI INDUSTRI MOD
- Page 120 and 121:
menjadi dua, yaitu fi xed automatio
- Page 122 and 123:
Gambar 3. Penggeser pneumatik dan r
- Page 124 and 125:
Perusahaan PLC saat ini sudah memul
- Page 126 and 127:
3.3.2 AND dan NOT AND (NAND) Jika m
- Page 128 and 129:
Tabel 4. Aturan aljabar saklar OR 3
- Page 130 and 131:
Simbol ladder diagramnya seperti Ga
- Page 132 and 133:
3.6. Device Masukan Program Device
- Page 134 and 135:
dan akan aktif pada saat sinyal dit
- Page 136 and 137:
Gambar 21. Hubungan antara I/O deng
- Page 138 and 139:
3.14.2.2 Special Relay Special rela
- Page 140 and 141:
3.14.2.10 Catu Daya (Power Supply)
- Page 142 and 143:
1. Untuk membuat ladder baru lagi d
- Page 144 and 145:
Maka kerja dari rangkaian tersebut
- Page 146 and 147:
Pada gambar diagram ladder tersebut
- Page 148 and 149:
Gambar 44. Diagram ladder aplikasi
- Page 150 and 151:
Pada saat volume minyak pelumas men
- Page 152 and 153:
14. Klik pada toolbar symbol dan Kl
- Page 154 and 155:
Contoh pembuatan diagram ladder pad
- Page 156 and 157: Gambar 49. Diagram Ladder aplikasi
- Page 158 and 159: 1. Pengenalan Robot BAB X TEKNOLOGI
- Page 160 and 161: Istilah Robot Sebagai pemahaman awa
- Page 162 and 163: Gambar 4. Robot dan kontroler 1.2.3
- Page 164 and 165: Efektor jika disamakan dengan manus
- Page 166 and 167: Aktuasi dapat menggunakan 3 dari pe
- Page 168 and 169: 1.4.3 Robot Teknologi Tinggi Robot
- Page 170 and 171: Gambar 13. Gerak Robot Rotasi,Trans
- Page 172 and 173: 2.1.3 Koordinat Polar Koordinat pol
- Page 174 and 175: Penggerak elektrik dapat bekerja de
- Page 176 and 177: Gambar 21. Jangkauan kerja sisi ata
- Page 178 and 179: Gambar 23. Robot palletizing 3.1.2
- Page 180 and 181: • Potensi resiko kanker, kabut ha
- Page 182 and 183: las manual maka lingkungan pengelas
- Page 184 and 185: 4.3.2 Gripper Ruang Hampa / Mangkok
- Page 186 and 187: • Ukuran komponen yang bisa berva
- Page 188 and 189: Sensor non-kontak dapat berupa, per
- Page 190 and 191: Gambar 40. Aplikasi sensor non-cont
- Page 192 and 193: pelindung. Kawat sensor ini bisa di
- Page 194 and 195: Gambar 46. Thermistor 4.9 Sensor Ca
- Page 196 and 197: 4.10 Sensor Jarak dan Sudut 4.10.1
- Page 198 and 199: Encoder memiliki dua jenis yaitu :
- Page 200 and 201: 5.1 Solenoids Solenoid merupakan ak
- Page 202 and 203: Gambar 60. Silinder penggerak ganda
- Page 204 and 205: Gambar 62. Prinsip kerja motor AC K
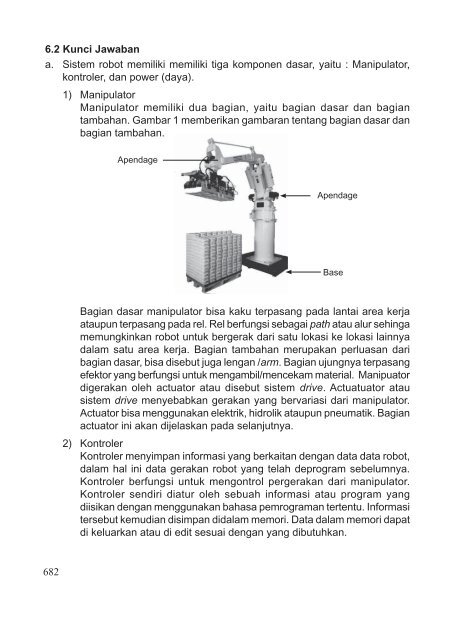
- Page 208 and 209: 3) Power Suply (Catu Daya) Power su
- Page 210 and 211: Robot memiliki tiga tingkatan/level
- Page 212 and 213: Perkembangan tuntutan konsumen yang
- Page 214 and 215: 9. Bagian kesembilan akan membahas
- Page 216 and 217: Peter Patient, dkk. Pengantar Ilmu