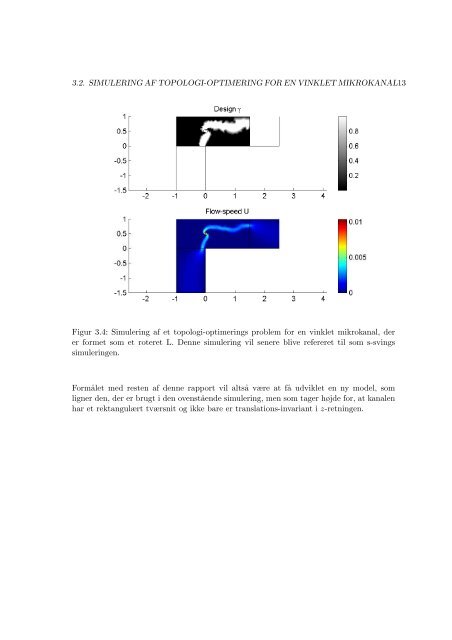
12 KAPITEL 3. TOPOLOGI-OPTIMERING Den iterative løsningsproces ser ud som følger. • For at starte iterationen gætter man på et simpelt svampe-design, altså et simpelt gamma-felt. For at gøre dette gæt fysisk beregnes den tilhørende hastighedsprofil for væskestrømningen, hvilket vil sige, at den simplificerede Navier-Stokes ligning løses. Med denne hastighedsprofil beregnes dernæst gradienten <strong>af</strong> målfunktionen langs den røde linie. Ved at følge denne gradient mod minimaet for målfunktionen, kommer man frem til et bedre gæt på gamma-feltet. • Dette gæt gøres så igen fysisk <strong>ved</strong> at beregne den tilhørende hastighedsprofil for væsken. Med denne profil beregnes så igen gradienten <strong>af</strong> målfunktionen langs den røde linie, og man kan dermed komme med et endnu bedre gæt på gamma-feltet. • Denne iterative proces fortsættes, indtil man <strong>ikke</strong> kan minimere målfunktionen y- derligere, og man har altså der<strong>ved</strong> fundet det bedst mulige svampe-design. 3.2 Simulering <strong>af</strong> topologi-<strong>optimering</strong> for en vinklet mikrokanal Der vil nu blive betragtet en konkret problemstilling, som omhandler topologi-<strong>optimering</strong> i en bestemt geometri med visse veldefinerede fysiske grænsebetingelser. Værktøjerne, som benyttes til at simulere problemet med, er MatLab og FemLab, som begge er programmer, der benytter sig <strong>af</strong> numeriske beregningsmetoder. Først defineres i FemLab det domæne, hvori problemet skal løses. I denne simulering konstrueres et vinklet domæne, som ligner et roteret L. Dette L-domæne opdeles i tre sub-domæner. Det midterste <strong>af</strong> disse sub-domæner skal svare til en porøs svamp <strong>af</strong> samme type, som den der blev omtalt først i dette kapitel, mens de to andre domæner skal svare til en tom kanal, hvor væsken kan bevæge sig ”frit”dog med ”no-slip”grænsebetingelser på kanalvæggene. Dette gøres <strong>ved</strong> at definere et varierende γ-felt i det midterste sub-domæne, og sætte γ = 1 i de to andre sub-domæner. Hvis simuleringen køres, er resultatet de to figurer vist i fig. 3.4. Den øverste <strong>af</strong> figurerne viser det design <strong>af</strong> svampen, som simuleringen har fundet frem til bedst minimerer målfunktionen, mens den nederste figur viser, hvordan hastigheden <strong>af</strong> væsken varierer gennem kanalen. Ved at betragte det design, som simuleringen er kommet frem til, kan det meget let konkluderes, at design-<strong>optimering</strong>en bestemt <strong>ikke</strong> er triviel. Det kræver i hvert fald en meget god fantasi, hvis man selv skulle komme op med netop dette design. Denne simulering, som senere vil blive refereret til som s-svings simuleringen, har altså nu optimeret målfunktionen for en væskestrømning gennem den porøse svamp. I simuleringen er den kanal, som væsken skal flyde igennem, en kanal som er translations-invariant i z-retningen, hvilket svarer til, at kanalen <strong>ikke</strong> har nogen top og bund. Det vil altså sige, at denne simulering er første skridt imod en simulering <strong>af</strong> en rektangulær kanal, som jo foruden vægge også har top og bund.
3.2. SIMULERING AF TOPOLOGI-OPTIMERING FOR EN VINKLET MIKROKANAL13 Figur 3.4: Simulering <strong>af</strong> et topologi-<strong>optimering</strong>s problem for en vinklet mikrokanal, der er formet som et roteret L. Denne simulering vil senere blive refereret til som s-svings simuleringen. Formålet med resten <strong>af</strong> denne rapport vil altså være at få udviklet en ny model, som ligner den, der er <strong>brug</strong>t i den ovenstående simulering, men som tager højde for, at kanalen har et rektangulært tværsnit og <strong>ikke</strong> bare er translations-invariant i z-retningen.