

Effizientes Model-Checking für CTL - Institut für Theoretische ...
Effizientes Model-Checking für CTL - Institut für Theoretische ...
Effizientes Model-Checking für CTL - Institut für Theoretische ...
WENIGER ANZEIGEN

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
a<br />
a<br />
a,b a,b<br />
a<br />
a<br />
b a,b<br />
Kripke-Struktur<br />
a<br />
b a<br />
a,b a<br />
b<br />
a a,b<br />
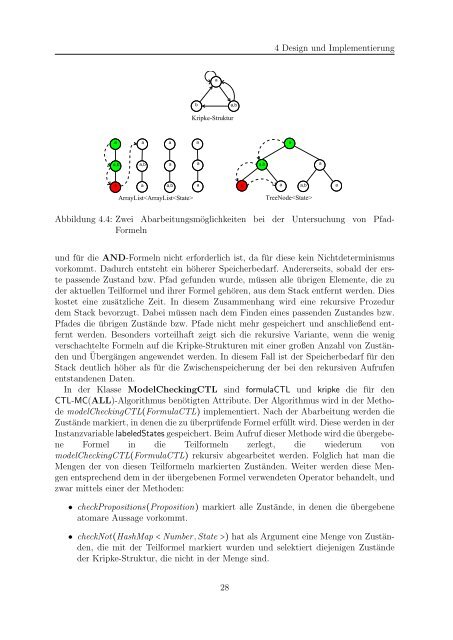
ArrayList) hat als Argument eine Menge von Zuständen,<br />
die mit der Teilformel markiert wurden und selektiert diejenigen Zustände<br />
der Kripke-Struktur, die nicht in der Menge sind.<br />
28<br />
a<br />
a





