Symmetrie in physikalischen Eigenschaften des Festkörpers
Symmetrie in physikalischen Eigenschaften des Festkörpers
Symmetrie in physikalischen Eigenschaften des Festkörpers

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1<br />
<strong>Symmetrie</strong> <strong>in</strong> <strong>physikalischen</strong> <strong>Eigenschaften</strong><br />
<strong>des</strong> <strong>Festkörpers</strong><br />
Jörg Ihr<strong>in</strong>ger<br />
Institut für Kristallographie der Universität Tüb<strong>in</strong>gen<br />
Auf der Morgenstelle 10<br />
72076 Tüb<strong>in</strong>gen<br />
Vorlesung im Sommersemester 2001 mit Übungen
2<br />
1 Grundbegriffe zu Vektoren ......................................................................................................3<br />
1.1 Abbildungen, Transformation der Koord<strong>in</strong>aten ...............................................................3<br />
1.2 L<strong>in</strong>earer Vektorraum ........................................................................................................4<br />
1.3 Das Skalarprodukt ............................................................................................................5<br />
1.4 Das Vektorprodukt ...........................................................................................................5<br />
1.5 Das Spatprodukt ...............................................................................................................6<br />
2 Vektoren <strong>in</strong> unterschiedlichen Koord<strong>in</strong>atensystemen..............................................................6<br />
2.1 Das kartesische Koord<strong>in</strong>atensystem.................................................................................6<br />
2.2 Beliebige Koord<strong>in</strong>atensysteme.........................................................................................7<br />
2.3 Zerlegung e<strong>in</strong>es Vektors <strong>in</strong> Richtung e<strong>in</strong>es vorgegebenen Koord<strong>in</strong>atensystems ............9<br />
2.3.1 Beziehung zwischen den Transformationskoeffizienten..........................................9<br />
01<br />
2.3.1.1 Beispiel: Ausführliche Berechnung <strong>des</strong> Koeffizienten a<br />
1<br />
...............................11<br />
2.4 Das ko- und kontravariante Koord<strong>in</strong>atensystem ............................................................12<br />
2.4.1 Die Metrik-Koeffizienten.......................................................................................13<br />
2.4.2 Beziehungen zwischen den ko- und kontravarianten Vektorkomponenten ...........16<br />
2.5 Transformation der ko- und kontravarianten Komponenten bei Wechsel <strong>des</strong><br />
Bezugssystems ...........................................................................................................................16<br />
3 Tensoren höherer Stufe ..........................................................................................................20<br />
3.1 Tensoren 2. Stufe............................................................................................................20<br />
3.1.1 Transformation der Komponenten e<strong>in</strong>es Tensors 2. Stufe bei Wechsel <strong>des</strong><br />
Bezugssystems .......................................................................................................................22<br />
3.1.2 Der Metriktensor ....................................................................................................23<br />
3.1.3 Der Spannungstensor (Stress Tensor) ....................................................................24<br />
3.1.4 Die Hauptachsentransformation.............................................................................29<br />
3.1.5 Der Dehnungstensor (Stra<strong>in</strong> Tensor)......................................................................31<br />
Die <strong>physikalischen</strong> Komponenten e<strong>in</strong>es Tensors...................................................................34<br />
3.2 Tensoren höherer als zweiter Stufe ................................................................................35<br />
3.2.1 Rechenregeln für Tensoren ....................................................................................35<br />
3.2.2 Der Elastizitätstensor..............................................................................................36<br />
4 Analyse physikalischer <strong>Eigenschaften</strong> mit Hilfe der Gruppentheorie ...................................38<br />
4.1 Begriffe zur Darstellungstheorie ....................................................................................39<br />
4.1.1 <strong>Symmetrie</strong> angepasste Basisvektoren ....................................................................39<br />
4.1.2 Operatoren, von Neumannsches Pr<strong>in</strong>zip ................................................................40<br />
4.1.2.1 Operator im Vektorraum der Atomlagen ...........................................................40<br />
4.1.2.2 Operator im Vektorraum „Atomare Auslenkung“: ............................................41<br />
4.1.2.3 Operator im Vektorraum <strong>des</strong> Dehnungstensors (thermische Ausdehnung).......46<br />
4.2 Homomorphe Abbildung................................................................................................48<br />
4.3 Aufbau der reduziblen Darstellung: ...............................................................................50<br />
4.4 Zerlegung nach irreduziblen Darstellungen ...................................................................51<br />
4.4.1 Zerlegung <strong>des</strong> Dehnungstensors nach irreduziblen Darstellungen ........................53<br />
4.4.2 Basisvektoren zum Dehnungstensor, <strong>Symmetrie</strong> 4................................................54
3<br />
1 Grundbegriffe zu Vektoren<br />
1.1 Abbildungen, Transformation der Koord<strong>in</strong>aten<br />
x ′<br />
i<br />
= t ´ x<br />
ik k<br />
x′<br />
= T ⋅ x<br />
Transformation e<strong>in</strong>es Vektors bei e<strong>in</strong>em orthogonalen<br />
Koord<strong>in</strong>atensystem, wobei der Ursprung identisch<br />
bleibe.<br />
Diese Transformationseigenschaft def<strong>in</strong>iert e<strong>in</strong>en<br />
Vektor (e<strong>in</strong>en Tensor 1. Stufe)- unabhängig von der<br />
Dimension <strong>des</strong> Raumes<br />
T<br />
Die Matrix T beschreibt die Abbildung <strong>des</strong> Vektors x<br />
auf x′, die Zahlen <strong>in</strong> der Matrix beziehen sich auf das<br />
vorgegebene Koord<strong>in</strong>atensystem.<br />
x<br />
Abbildung T<br />
x′
4<br />
1.2 L<strong>in</strong>earer Vektorraum<br />
x, y<br />
E<strong>in</strong> l<strong>in</strong>earer Vektorraum ( L ) ist e<strong>in</strong> Satz von Objekten ,..... mit der Eigenschaft, dass<br />
die Objekte mit komplexen Zahlen multipliziert und addiert werden können.<br />
1. S<strong>in</strong>d x , y ∈ L, dann ist α ⋅ x∈ L und x + y ∈ L , α sei e<strong>in</strong>e komplexe Zahl.<br />
2. Es gilt das Distributiv-Gesetz:<br />
( α + β ) ⋅x<br />
= α ⋅ x + β ⋅x<br />
( α ⋅ β ) ⋅ x = α ⋅( β ⋅ x)<br />
α ⋅ x + y = α ⋅ x + α ⋅<br />
( ) y<br />
3. L enthält e<strong>in</strong>en Nullvektor 0, so dass x + 0 = x<br />
α ⋅ y<br />
α ⋅ ( x + y)<br />
y<br />
x + y<br />
α ⋅ x<br />
x<br />
Objekte <strong>des</strong> Vektorraums <strong>in</strong> der Festkörperphysik:<br />
1. Vektoren <strong>des</strong> Orts-Raums x = ( x1 , x2,<br />
x3<br />
)<br />
2. n⋅ n Matrizen oder Tensoren = ( x ik<br />
)<br />
x + y = ( x + y )<br />
ik ik<br />
x , i = 1 ... n,<br />
k = 1...<br />
n<br />
3. Funktionen e<strong>in</strong>er reellen oder komplexen Veränderlichen z:<br />
x = ∑ x ⋅ f ( z)<br />
, , x + y = ( x + y ) ⋅ f ( z)<br />
r<br />
r<br />
r<br />
∑<br />
r<br />
4. Atomare Auslenkungsfelder, bei N Teilchen 3N dimensional<br />
r<br />
r<br />
r
5<br />
1.3 Das Skalarprodukt<br />
( A B)<br />
U = A ⋅ B = A ⋅ B ⋅ cos ,<br />
Das Skalarprodukt zwischen zwei Vektoren A, B ist e<strong>in</strong><br />
Skalar U . Es gilt das Kommutativ- und Distributivgesetz.<br />
( A , B)<br />
W<strong>in</strong>kel zwischen den Vektoren A, B<br />
E<strong>in</strong> Beispiel für die Anwendung <strong>des</strong> Skalarprodukts ist die mechanische Arbeit bei Kraftwirkung<br />
entlang e<strong>in</strong>es Wegs: Die Arbeit ist das Skalarprodukt aus dem Kraftvektor Kraft- und dem Vektor<br />
entlang <strong>des</strong> Wegs.<br />
Besonders wichtig ist das Skalarprodukt, um den W<strong>in</strong>kel zwischen zwei Vektoren zu berechnen.<br />
S<strong>in</strong>d das Skalarprodukt und die Beträge nicht bekannt, dann müssen, zu ihrer Berechnung, die<br />
Komponenten der Vektoren bekannt se<strong>in</strong>:<br />
cos<br />
( A,<br />
B)<br />
=<br />
A ⋅ B<br />
A⋅<br />
B<br />
Berechnung <strong>des</strong> W<strong>in</strong>kels zwischen den Vektoren<br />
Hilfe <strong>des</strong> Skalarprodukts<br />
A, B mit<br />
1.4 Das Vektorprodukt<br />
C = A × B = A ⋅ B ⋅s<strong>in</strong>(<br />
A,<br />
B)<br />
⋅<br />
C 0<br />
Das Vektorprodukt zwischen den Vektoren A, B ist e<strong>in</strong><br />
Vektor, der senkrecht zu der von A, B aufgespannten Ebene<br />
steht. Se<strong>in</strong>e Richtung wird so gewählt, dass die Vektoren<br />
A , B,<br />
C e<strong>in</strong> Rechtssystem bilden.<br />
C<br />
0<br />
E<strong>in</strong>heitsvektor <strong>in</strong> Richtung von C<br />
Der Betrag <strong>des</strong> Vektorprodukts von zwei Vektoren im dreidimensionalen Raum zeigt die Fläche<br />
<strong>des</strong> von den Vektoren aufgespannten Parallelogramms.<br />
E<strong>in</strong> Beispiel für das Vektorprodukt ist die Berechnung <strong>des</strong> Vektors <strong>des</strong> Drehmoments als<br />
Vektorprodukt aus dem Vektor der Kraft und dem vom Bezugspunkt für das Drehmoment<br />
ausgehenden Ortsvektor bis zum Angriffspunkt der Kraft.
6<br />
1.5 Das Spatprodukt<br />
V<br />
= A ⋅ ( B × C)<br />
Das Spatprodukt zeigt das Volumen <strong>des</strong> von den Vektoren<br />
A , B,<br />
C aufgespannten Körpers („Spat“).<br />
A ⋅ ( B × C)<br />
= [ A,<br />
B,<br />
C]<br />
( [ C , A, B] = [ B,<br />
C,<br />
A]<br />
= )<br />
Das Spatprodukt behält bei zyklischer Vertauschung der<br />
Komponenten se<strong>in</strong>en Wert. Deshalb wählt man e<strong>in</strong> spezielles<br />
Symbol, das die zyklische Reihenfolge der Vektoren zeigt.<br />
Vertauschung von nur zwei Vektoren ändert das Vorzeichen!<br />
Das Spatprodukt ist Null, wenn es l<strong>in</strong>ear abhängige Vektoren enthält. Es ist anschaulich klar, dass<br />
<strong>in</strong> diesem Fall drei Vektoren ke<strong>in</strong> Volumen aufspannen.<br />
Das Spatprodukt wird im Folgenden e<strong>in</strong>gesetzt, um die Längen der Komponenten e<strong>in</strong>es Vektors<br />
auf die Längen der Basisvektoren <strong>des</strong> zugrunde gelegten Koord<strong>in</strong>atensystems anzupassen.<br />
2 Vektoren <strong>in</strong> unterschiedlichen Koord<strong>in</strong>atensystemen<br />
2.1 Das kartesische Koord<strong>in</strong>atensystem<br />
E<strong>in</strong> Koord<strong>in</strong>atensystem, das der Isotropie und Homogenität <strong>des</strong> Raums entspricht, ist das<br />
kartesische, <strong>des</strong>sen Basisvektoren gleich lange E<strong>in</strong>heitsvektoren s<strong>in</strong>d, die orthogonal zue<strong>in</strong>ander<br />
stehen. Es ist zur Rechnung besonders angenehm, weil die Skalar- und Spatprodukte zwischen<br />
den Basisvektoren nur entweder 1 oder 0 ergeben.<br />
g<br />
01, g<br />
02<br />
, g<br />
03<br />
g<br />
⋅ g<br />
=<br />
0k 0l<br />
δ<br />
0k<br />
0l<br />
g =<br />
01<br />
× g<br />
02<br />
g<br />
03<br />
03<br />
× g<br />
01<br />
g<br />
02<br />
02<br />
× g<br />
03<br />
g<br />
01<br />
g =<br />
g =<br />
Basisvektoren e<strong>in</strong>es orthogonalen Koord<strong>in</strong>atensystems. Der<br />
Index o vor der Nummer <strong>des</strong> Basisvektors kennzeichne das<br />
kartesische Koord<strong>in</strong>atensystem.<br />
Das Skalarprodukt zwischen unterschiedlichen Basisvektoren<br />
ist Null, zwischen zwei gleichen E<strong>in</strong>s.<br />
Das Vektorprodukt zwischen zwei Basisvektoren ergibt<br />
jeweils den im Produkt fehlenden dritten (zyklische<br />
Vertauschung)<br />
[ g , g ] 1<br />
g Das Spatprodukt, gebildet aus den Basisvektoren, ist 1.<br />
01<br />
,<br />
02 03<br />
=<br />
Tabelle 1 Skalar- Vektor- und Spatprodukt für e<strong>in</strong> kartesisches Koord<strong>in</strong>atensystem
7<br />
2.2 Beliebige Koord<strong>in</strong>atensysteme<br />
Für das Folgende werden, zur Verkürzung der Schreibweise, zwei Vere<strong>in</strong>barungen getroffen:<br />
Buchstaben<strong>in</strong>dizes<br />
Summationskonvention<br />
Jeder Buchstaben<strong>in</strong>dex kann die Werte 1,2,3<br />
annehmen<br />
Wenn e<strong>in</strong> Buchstaben<strong>in</strong>dex gleichzeitig als<br />
oberer und unterer Index auftritt, soll über<br />
diesen Index e<strong>in</strong>e Summation von 1 bis 3<br />
erfolgen<br />
Die Basisvektoren e<strong>in</strong>es beliebigen Koord<strong>in</strong>atensystems kann man als L<strong>in</strong>earkomb<strong>in</strong>ationen<br />
kartesischer Basisvektoren darstellen:<br />
g<br />
g<br />
g<br />
g<br />
1<br />
g<br />
2<br />
,<br />
, g<br />
01 02 03<br />
1<br />
= a<br />
1<br />
g<br />
01<br />
+ a1<br />
g<br />
02<br />
+ a1<br />
g<br />
03<br />
01 02<br />
03<br />
2<br />
= a<br />
2<br />
g<br />
01<br />
+ a2<br />
g<br />
02<br />
+ a2<br />
g<br />
03<br />
01 02 03<br />
3<br />
= a<br />
3<br />
g<br />
01<br />
+ a3<br />
g<br />
02<br />
+ a3<br />
g<br />
03<br />
g =<br />
3<br />
l<br />
k<br />
a 0 k<br />
g<br />
0l<br />
Basisvektoren e<strong>in</strong>es beliebigen<br />
Koord<strong>in</strong>atensystems.<br />
Aufstellung <strong>des</strong> beliebigen Koord<strong>in</strong>atensystems<br />
im kartesischen. Die neun<br />
Transformationskoeffizienten<br />
01 02 03<br />
03<br />
a<br />
1<br />
, a1<br />
, a1<br />
,......., a3<br />
def<strong>in</strong>ieren das beliebige<br />
Koord<strong>in</strong>atensystem.<br />
Schreibweise mit Buchstaben<strong>in</strong>dizes und<br />
Summationskonvention<br />
Tabelle 2 Basisvektoren e<strong>in</strong>es beliebigen Koord<strong>in</strong>atensytems als L<strong>in</strong>earkomb<strong>in</strong>ation aus<br />
Basisvektoren e<strong>in</strong>es kartesischen Systems<br />
g<br />
g<br />
g<br />
1 2 3<br />
01<br />
= a<br />
01g1<br />
+ a01g<br />
2<br />
+ a01g<br />
3<br />
1 2 3<br />
02<br />
= a<br />
02g1<br />
+ a02g<br />
2<br />
+ a02g<br />
3<br />
1 2 3<br />
03<br />
= a<br />
03g1<br />
+ a03g<br />
2<br />
+ a03g<br />
3<br />
l<br />
g<br />
0 k<br />
=<br />
0k<br />
a g<br />
l<br />
Umkehrung: Die kartesischen Basisvektoren<br />
werden durch die <strong>des</strong> beliebigen<br />
Koord<strong>in</strong>atensystems ausgedrückt<br />
Schreibweise mit Summationskonvention,<br />
k=1,2,3.<br />
Tabelle 3 Basisvektoren e<strong>in</strong>es kartesischen Koord<strong>in</strong>atensystems als L<strong>in</strong>earkomb<strong>in</strong>ation aus<br />
Basisvektoren e<strong>in</strong>es beliebigen Systems
8<br />
Beispiel:<br />
g =<br />
1<br />
g 01<br />
2<br />
= g<br />
01<br />
g<br />
02<br />
3<br />
= g<br />
01<br />
+ g<br />
02<br />
g<br />
03<br />
g +<br />
g +<br />
g =<br />
01<br />
g 1<br />
02<br />
= −g1<br />
g<br />
2<br />
03<br />
= −g<br />
2<br />
g<br />
3<br />
g +<br />
g +<br />
Aufstellung e<strong>in</strong>es Koord<strong>in</strong>atensystems<br />
(Beispiel 1) als L<strong>in</strong>earkomb<strong>in</strong>ation aus<br />
kartesischen Basisvektoren<br />
Umkehrung dazu<br />
Tabelle 4 Zahlenbeispiel zur Aufstellung e<strong>in</strong>es beliebigen Koord<strong>in</strong>atensystems aus den<br />
Basisvektoren e<strong>in</strong>es kartesischen Systems<br />
a<br />
03<br />
a<br />
3<br />
a<br />
1<br />
a<br />
01<br />
a<br />
2<br />
a<br />
02<br />
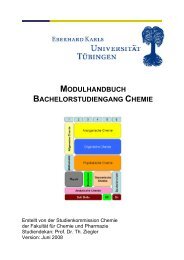
Abbildung 1 Basisvektoren <strong>des</strong> Koord<strong>in</strong>atensystems <strong>des</strong> Beispiels (grün) und Basisvektoren e<strong>in</strong>es<br />
kartesischen Systems (blau, sie bilden die Kanten der Würfel, die Kantenlänge sei 1). Rechts:<br />
„Spat“ aus den grünen Basisvektoren. Der Punkt zeigt den Ursprung der Koord<strong>in</strong>atensysteme.<br />
Im Folgenden dient dieses System als Realisierung e<strong>in</strong>es kovarianten Koord<strong>in</strong>atensystems. Das<br />
dazu kontravariante Koord<strong>in</strong>atensystem zeigt Abbildung 2, es wird im Folgenden e<strong>in</strong>geführt.
9<br />
2.3 Zerlegung e<strong>in</strong>es Vektors <strong>in</strong> Richtung e<strong>in</strong>es vorgegebenen<br />
Koord<strong>in</strong>atensystems<br />
Kennt man die Vektorprodukte zwischen den Basisvektoren, dann kann e<strong>in</strong> beliebiger Vektor<br />
unmittelbar <strong>in</strong> se<strong>in</strong>e Komponenten zerlegt werden:<br />
A =<br />
g<br />
1 2<br />
A g1<br />
+ A g<br />
2<br />
+<br />
1<br />
g<br />
2<br />
,<br />
, g<br />
3<br />
3<br />
A g<br />
1<br />
( g × g ) = g ⋅ ( g )<br />
A ⋅ A ×<br />
A<br />
1<br />
2 3<br />
1 2<br />
g<br />
3<br />
=<br />
[ A,<br />
g<br />
2<br />
, g<br />
3<br />
]<br />
[ g1,<br />
g<br />
2<br />
, g<br />
3<br />
]<br />
[ A,<br />
g<br />
l<br />
, g<br />
m<br />
]<br />
[ g , g g ]<br />
zykl.<br />
k<br />
A = , ( k , l,<br />
m)<br />
= (1,2,3 )<br />
1 2<br />
,<br />
3<br />
3<br />
Vektor <strong>in</strong> e<strong>in</strong>em beliebigen Koord<strong>in</strong>atensystem.<br />
Die Komponenten A k , k = 1,2, 3 sollen ermittelt<br />
werden<br />
Basisvektoren e<strong>in</strong>es beliebigen<br />
Koord<strong>in</strong>atensystems.<br />
1<br />
Zur Berechnung von A wird die ganze<br />
Gleichung von rechts mit dem Vektorprodukt<br />
g × multipliziert. Man erhält unmittelbar:<br />
2<br />
g 3<br />
Aufgelöst nach<br />
Spatprodukten<br />
Komponenten<br />
1<br />
A , formuliert mit<br />
A<br />
1 2 3<br />
, A , A<br />
Tabelle 5 Berechnung der Koord<strong>in</strong>aten e<strong>in</strong>es Vektors <strong>in</strong> e<strong>in</strong>em beliebigen Koord<strong>in</strong>atensystem<br />
2.3.1 Beziehung zwischen den Transformationskoeffizienten<br />
E<strong>in</strong>e Beziehung zwischen den Transformationskoeffizienten von e<strong>in</strong>em beliebigen- zu e<strong>in</strong>em<br />
l<br />
kartesischen System folgt, wenn man <strong>in</strong> g = 0 g ( Tabelle 2 ), wie <strong>in</strong> der „Umkehrung“ <strong>in</strong><br />
Tabelle 3 formuliert,<br />
m<br />
g<br />
0l<br />
durch g<br />
l<br />
a0lg<br />
m<br />
k<br />
ak<br />
0l<br />
0<br />
= ersetzt.<br />
g<br />
g<br />
1<br />
2<br />
= a<br />
+ a<br />
+ a<br />
= a<br />
+ a<br />
+ a<br />
01<br />
1<br />
02<br />
1<br />
03<br />
1<br />
01<br />
2<br />
02<br />
2<br />
03<br />
2<br />
( a<br />
( a<br />
( a<br />
( a<br />
( a<br />
( a<br />
1<br />
01<br />
1<br />
02<br />
1<br />
03<br />
1<br />
01<br />
1<br />
02<br />
1<br />
03<br />
g<br />
g<br />
g<br />
g<br />
g<br />
g<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
+ a<br />
+ a<br />
+ a<br />
+ a<br />
+ a<br />
+ a<br />
2<br />
01<br />
2<br />
02<br />
2<br />
03<br />
2<br />
03<br />
g<br />
2<br />
01<br />
2<br />
02<br />
g<br />
g<br />
g<br />
g<br />
g<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2<br />
+ a<br />
+ a<br />
3<br />
01<br />
+ a<br />
+ a<br />
+ a<br />
+ a<br />
g<br />
3<br />
02<br />
3<br />
03<br />
3<br />
01<br />
3<br />
02<br />
3<br />
03<br />
g<br />
g<br />
g<br />
g<br />
g<br />
3<br />
3<br />
3<br />
3<br />
3<br />
3<br />
)<br />
)<br />
)<br />
)<br />
)<br />
)<br />
Aus dem Vergleich der Koeffizienten für g<br />
k<br />
folgen neun Gleichungen, aus denen e<strong>in</strong> Satz<br />
aus dem jeweils anderen berechnet werden<br />
kann.<br />
g<br />
3<br />
= a<br />
+ a<br />
+ a<br />
01<br />
3<br />
02<br />
3<br />
03<br />
3<br />
( a<br />
( a<br />
( a<br />
1<br />
01<br />
1<br />
02<br />
1<br />
03<br />
g<br />
g<br />
g<br />
1<br />
1<br />
1<br />
+ a<br />
+ a<br />
+ a<br />
2<br />
01<br />
2<br />
02<br />
2<br />
03<br />
g<br />
g<br />
g<br />
2<br />
2<br />
2<br />
+ a<br />
+ a<br />
+ a<br />
3<br />
01<br />
3<br />
02<br />
3<br />
03<br />
g<br />
g<br />
g<br />
3<br />
3<br />
3<br />
)<br />
)<br />
)<br />
Tabelle 6 Basisvektoren e<strong>in</strong>es beliebigen Koord<strong>in</strong>atensystems als L<strong>in</strong>earkomb<strong>in</strong>ation der<br />
substituierten kartesischen Basisvektoren
10<br />
1 = a a + a a + a a<br />
01<br />
1<br />
01<br />
1<br />
1<br />
01<br />
2<br />
01<br />
02<br />
1<br />
02<br />
1<br />
1<br />
02<br />
2<br />
02<br />
03<br />
1<br />
0 = a a + a a + a a<br />
01<br />
1<br />
3<br />
01<br />
02<br />
1<br />
3<br />
02<br />
03<br />
1<br />
0 = a a + a a + a a<br />
03<br />
1<br />
1<br />
03<br />
2<br />
03<br />
3<br />
03<br />
0 = a a + a a + a a<br />
01<br />
2<br />
01<br />
2<br />
1<br />
01<br />
2<br />
01<br />
02<br />
2<br />
02<br />
2<br />
1<br />
02<br />
2<br />
02<br />
03<br />
2<br />
1 = a a + a a + a a<br />
01<br />
2<br />
3<br />
01<br />
02<br />
2<br />
3<br />
02<br />
03<br />
2<br />
0 = a a + a a + a a<br />
03<br />
2<br />
1<br />
03<br />
2<br />
03<br />
3<br />
03<br />
Inhomogenes Gleichungssystem mit 9<br />
k<br />
unbekannten a 0 , k=1,2,3, l=1,2,3<br />
l<br />
0 = a a + a a + a a<br />
01<br />
3<br />
01<br />
3<br />
1<br />
01<br />
2<br />
01<br />
02<br />
3<br />
02<br />
3<br />
1<br />
02<br />
2<br />
02<br />
03<br />
3<br />
0 = a a + a a + a a<br />
01<br />
3<br />
3<br />
01<br />
02<br />
3<br />
3<br />
02<br />
03<br />
3<br />
1 = a a + a a + a a<br />
03<br />
3<br />
1<br />
03<br />
2<br />
03<br />
3<br />
03<br />
a<br />
01<br />
k<br />
a<br />
a<br />
a<br />
a<br />
a<br />
l 02 l 03 l<br />
01<br />
+<br />
k 02<br />
+<br />
k 03<br />
a<br />
0i<br />
a 0l<br />
k 0i<br />
= δ<br />
l<br />
k<br />
= δ<br />
l<br />
k<br />
Verkürzte Schreibweise, k=1,2,3, l=1,2,3<br />
Tabelle 7 Gleichungssystem für die Transformationskoeffizienten zwischen e<strong>in</strong>em kartesischenund<br />
e<strong>in</strong>em beliebigen Koord<strong>in</strong>atensystem<br />
g<br />
01<br />
02<br />
03<br />
01<br />
= A<br />
01<br />
⋅ a1<br />
+ ⋅A<br />
02<br />
⋅ a1<br />
+ A<br />
03<br />
⋅ a1<br />
Die ersten drei Gleichungen werden als<br />
Vektorsumme <strong>in</strong> e<strong>in</strong>em kartesischen<br />
Koord<strong>in</strong>atensystem <strong>in</strong>terpretiert.<br />
a k l<br />
=<br />
0<br />
a<br />
a<br />
a<br />
1<br />
01<br />
2<br />
01<br />
3<br />
01<br />
a<br />
a<br />
a<br />
1<br />
02<br />
2<br />
02<br />
3<br />
02<br />
a<br />
a<br />
a<br />
1<br />
03<br />
2<br />
03<br />
3<br />
03<br />
Die drei Vektoren A<br />
01, A<br />
02 , A<br />
03<br />
s<strong>in</strong>d<br />
Zeilenvektoren der Matrix<br />
k<br />
a 0 l<br />
a<br />
01<br />
1<br />
=<br />
[ g<br />
01,<br />
A<br />
02<br />
, A<br />
03<br />
]<br />
[ A , A , A ]<br />
01<br />
02<br />
03<br />
Die Lösungen für die Koeffizienten, z. B. für<br />
01<br />
a<br />
1<br />
, ergeben sich aus dem Verfahren <strong>in</strong> Tabelle<br />
5.<br />
Tabelle 8 Berechnung e<strong>in</strong>es Koeffizienten aus den ersten drei Gleichungen. (Analog werden die<br />
Gleichungen 4 bis 6 und 7 bis 9 <strong>in</strong>terpretiert).
11<br />
Die allgeme<strong>in</strong>e Lösung für die Komponenten der Basisvektoren ist:<br />
l<br />
( a )<br />
0k<br />
k l<br />
al<br />
=<br />
1 ( −1)<br />
+ U<br />
k<br />
0k<br />
a0l<br />
a<br />
l<br />
( a )<br />
k<br />
k l<br />
0 l<br />
=<br />
1 ( −1)<br />
+<br />
0k<br />
al<br />
k<br />
Komponenten <strong>des</strong> Basisvektors g<br />
l<br />
im kartesischen<br />
Koord<strong>in</strong>atensystem<br />
g<br />
0l<br />
U 0<br />
Unterdeterm<strong>in</strong>ante der Matrix<br />
k<br />
a 0 l<br />
Determ<strong>in</strong>ante der Matrix<br />
U<br />
0l<br />
( a )<br />
k<br />
k<br />
a 0 l<br />
k<br />
a 0 l<br />
zum Element<br />
Umkehrung: Komponenten <strong>des</strong> kartesischen<br />
Basisvektors g im Koord<strong>in</strong>atensystem der<br />
0l<br />
Basisvektoren g<br />
l<br />
Tabelle 9 Matrixelemente der Transformationsmatrizen zwischen e<strong>in</strong>em kartesischen und e<strong>in</strong>em<br />
beliebigen Koord<strong>in</strong>atensystem<br />
l<br />
a 0 k<br />
2.3.1.1 Beispiel: Ausführliche Berechnung <strong>des</strong> Koeffizienten<br />
01<br />
a<br />
1<br />
Weil das Koord<strong>in</strong>atensystem kartesisch ist, gilt:<br />
A<br />
02<br />
k<br />
[ , A A ] =<br />
A 01<br />
02<br />
,<br />
× A<br />
03<br />
03<br />
2 3<br />
⎛ a02a<br />
⎜<br />
2<br />
= ⎜−<br />
a01a<br />
⎜ 2 3<br />
⎝<br />
a01a<br />
2<br />
01<br />
3<br />
01<br />
2<br />
02<br />
3<br />
02<br />
03<br />
3<br />
03<br />
02<br />
a 0l<br />
− a<br />
+ a<br />
− a<br />
1 −1<br />
1<br />
a<br />
a<br />
2<br />
02<br />
a<br />
a<br />
3<br />
03<br />
a<br />
a<br />
2<br />
03<br />
3<br />
03<br />
a<br />
2 3<br />
03 02<br />
2 3<br />
03a01<br />
2 3<br />
02a01<br />
2 3 2 3 2 3 2 3<br />
[ g , , ] = 0 ⋅⎜−<br />
a a + a a ⎟ = a a − a a<br />
01<br />
A 0<br />
A 0<br />
2<br />
a<br />
3<br />
01<br />
1<br />
⎛1⎞<br />
⎛<br />
⎜ ⎟ ⎜<br />
⎜ ⎟<br />
⎜0⎟<br />
⎜<br />
⎝ ⎠ ⎝<br />
=<br />
U<br />
a<br />
a<br />
a<br />
01 03<br />
2 3<br />
01a02<br />
− a<br />
− a<br />
2<br />
03<br />
a<br />
3<br />
02<br />
03 01<br />
2 3<br />
02a01<br />
⎞<br />
⎟<br />
⎟<br />
⎠<br />
1 2 3 2 3<br />
( a ) = a a − a<br />
01 02 03 03a02<br />
[ g<br />
01,<br />
A<br />
02<br />
, A<br />
03<br />
]<br />
[ A , A , A ]<br />
01<br />
02<br />
03<br />
=<br />
a<br />
1<br />
k<br />
0l<br />
U<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
02<br />
1<br />
( a )<br />
01<br />
03<br />
03<br />
02<br />
Das Spatprodukt zwischen den drei<br />
A A ist die<br />
Vektoren [ ]<br />
Determ<strong>in</strong>ante<br />
01, 02 , A<br />
03<br />
k<br />
a 0 l<br />
der drei Vektoren<br />
Berechnung <strong>des</strong> Vektorprodukts<br />
A × aus der Unterdeterm<strong>in</strong>anten<br />
02<br />
A 03<br />
Man bildet dazu e<strong>in</strong>e Matrix mit<br />
1,-1,1 <strong>in</strong> der ersten, und den beiden zu<br />
multiplizierenden Vektoren <strong>in</strong> der<br />
zweiten und dritten Zeile.<br />
Das Spatprodukt mit dem kartesischen<br />
E<strong>in</strong>heitsvektor wählt die<br />
entsprechende Komponente aus dem<br />
Vektorprodukt.<br />
Unterdeterm<strong>in</strong>ante der Matrix<br />
zum Element<br />
1<br />
a<br />
01<br />
Lösung für die Komponente<br />
01<br />
a<br />
1<br />
k<br />
a 0 l<br />
01<br />
Tabelle 10 Berechnung der Komponente a<br />
1<br />
mit Hilfe der Regeln für Produkte zwischen<br />
Vektoren <strong>in</strong> e<strong>in</strong>em kartesischen Koord<strong>in</strong>atensystem
12<br />
2.4 Das ko- und kontravariante Koord<strong>in</strong>atensystem<br />
Zu jedem Koord<strong>in</strong>atensystem, mit beliebigen Längen der Basisvektoren und beliebigen W<strong>in</strong>keln<br />
zwischen ihnen, kann man e<strong>in</strong> zweites e<strong>in</strong>führen, mit der Eigenschaft, dass sich die<br />
Skalarprodukte, die aus den Basisvektoren <strong>des</strong> e<strong>in</strong>en mit denen <strong>des</strong> anderen gebildet werden, so<br />
verhalten, als wären es Skalarprodukte zwischen kartesischen E<strong>in</strong>heitsvektoren. Zwei<br />
Koord<strong>in</strong>atensysteme mit dieser Eigenschaft nennt man ko- und kontravariant.<br />
Skalarprodukte s<strong>in</strong>d <strong>in</strong> der Physik wichtig, z. B. ist die Phase e<strong>in</strong>er ebenen Welle an e<strong>in</strong>em<br />
bestimmten Ort das Skalarprodukt aus dem Wellenvektor, der die Ausbreitungsrichtung der<br />
Welle zeigt, und dem Ortsvektor von e<strong>in</strong>em Ursprung zum Ort der Beobachtung. Wenn die<br />
Verteilung der Orte die Wahl e<strong>in</strong>es nicht kartesischen Koord<strong>in</strong>atensystems nahe legt, dann ist es<br />
s<strong>in</strong>nvoll, z. B. die Ortsvektoren im ko- und den Ausbreitungsvektor im kontravarianten<br />
Koord<strong>in</strong>atensystem zu formulieren. Schiefw<strong>in</strong>klige Koord<strong>in</strong>atensysteme werden z. B. e<strong>in</strong>geführt,<br />
um die der Orte der Teilchen <strong>in</strong> nicht kubischen Kristallen zu beschreiben.<br />
g<br />
g , g g<br />
g<br />
l<br />
1 2<br />
,<br />
3<br />
1 2 3<br />
, g , g<br />
⋅ g<br />
k<br />
= δ<br />
Tabelle 11 Ko- und kontravariante Basisvektoren<br />
l<br />
k<br />
Basisvektoren <strong>des</strong> kovarianten<br />
Koord<strong>in</strong>atensystems, erkennbar an tiefgestellten<br />
Indizes<br />
Basisvektoren <strong>des</strong> kontravarianten<br />
Koord<strong>in</strong>atensystems, erkennbar an<br />
hochgestellten Indizes<br />
Diese Forderung für das Skalarprodukt<br />
zwischen den ko- und kontravarianten<br />
Basisvektoren def<strong>in</strong>iert den Zusammenhang<br />
zwischen beiden Basissystemen.<br />
g<br />
g<br />
zykl.<br />
g g<br />
= ( k , l,<br />
m)<br />
= (1,2,3 )<br />
k l<br />
×<br />
m<br />
1 2<br />
,<br />
3<br />
k<br />
[ g , g g ]<br />
g<br />
g<br />
g<br />
1<br />
2<br />
3<br />
=<br />
=<br />
=<br />
[ g , g g ]<br />
1 2<br />
,<br />
3<br />
g<br />
[ g , g , g ]<br />
1<br />
g<br />
2<br />
× g<br />
2<br />
3<br />
3<br />
[ g , g , g ]<br />
1<br />
g<br />
3<br />
× g<br />
2<br />
1<br />
3<br />
[ g , g , g ]<br />
1<br />
1<br />
× g<br />
l m<br />
zykl.<br />
g × g<br />
= ( k , l,<br />
m)<br />
= (1,2,3 )<br />
2<br />
2<br />
3<br />
Berechnung der kontravarianten Basisvektoren<br />
aus den kovarianten<br />
Ausführlich<br />
Umkehrung dazu: Berechnung der kovarianten<br />
Basisvektoren aus den kontravarianten<br />
Tabelle 12 Berechnung der kontravarianten Basisvektoren aus den kovarianten und umgekehrt<br />
Für beide Systeme gilt:
13<br />
• S<strong>in</strong>d die Basisvektoren <strong>des</strong> kovarianten Koord<strong>in</strong>atensystems l<strong>in</strong>ear unabhängig, dann s<strong>in</strong>d<br />
es auch die <strong>des</strong> kontravarianten Systems.<br />
• Bilden die Basisvektoren <strong>des</strong> kovarianten Koord<strong>in</strong>atensystems e<strong>in</strong> Rechtssystem, dann<br />
bilden es auch die <strong>des</strong> kontravarianten Systems<br />
• Für die Spatvolum<strong>in</strong>a <strong>in</strong> beiden Koord<strong>in</strong>atensystemen gilt:<br />
1 2 3<br />
[ g g , g ] ⋅[ g , g , g ] = 1<br />
,<br />
1 2 3<br />
Das Spatprodukt im kovarianten<br />
Basissystem ist der Kehrwert <strong>des</strong><br />
Spatprodukts im kontravarianten<br />
Basissystem<br />
3<br />
g<br />
1<br />
g<br />
2<br />
g<br />
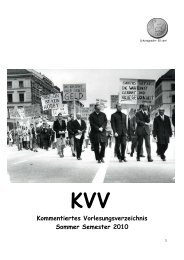
Abbildung 2 Basisvektoren <strong>des</strong> kontravarianten Koord<strong>in</strong>atensystems zum kovarianten<br />
Koord<strong>in</strong>atensystem der Abbildung 1. Die Kanten der Würfel entsprechen wieder den kartesischen<br />
Basisvektoren. Rechts: „Spat“ aus den kontravarianten Basisvektoren.<br />
2.4.1 Die Metrik-Koeffizienten<br />
Zur Erweiterung der Def<strong>in</strong>ition der ko- und kontravarianten Basisvektoren auf Räume mit<br />
Dimension größer als drei beschreibt man die kontravarianten Basisvektoren als<br />
L<strong>in</strong>earkomb<strong>in</strong>ation aus den kovarianten. Die Transformationskoeffizienten heißen „Metrik-<br />
Koeffizienten“.
14<br />
g<br />
g<br />
g<br />
1<br />
2<br />
2<br />
=<br />
=<br />
=<br />
g<br />
l<br />
g<br />
⋅ g<br />
k<br />
= δ<br />
1 2 3<br />
, g , g<br />
l<br />
k<br />
11 12<br />
g g1<br />
+ g g<br />
2<br />
+<br />
21 22<br />
g g1<br />
+ g g<br />
2<br />
+<br />
31 32<br />
g g1<br />
+ g g<br />
2<br />
+<br />
k<br />
g =<br />
kl<br />
g g<br />
l<br />
g<br />
g<br />
g<br />
13<br />
23<br />
33<br />
g<br />
g<br />
g<br />
3<br />
3<br />
3<br />
Def<strong>in</strong>ition der ko- und kontravarianten<br />
Basisvektoren<br />
Basisvektoren <strong>des</strong> kontravarianten<br />
Koord<strong>in</strong>atensystems.<br />
Aufstellung <strong>des</strong> kontravarianten<br />
Koord<strong>in</strong>atensystems im kovarianten. Die neun<br />
Transformationskoeffizienten<br />
11 12 13<br />
33<br />
g , g , g ,......., g def<strong>in</strong>ieren das beliebige<br />
Koord<strong>in</strong>atensystem.<br />
Schreibweise mit Buchstaben<strong>in</strong>dizes und<br />
Summationskonvention<br />
Tabelle 13 Basisvektoren <strong>des</strong> kontravarianten Koord<strong>in</strong>atensytems als L<strong>in</strong>earkomb<strong>in</strong>ation aus<br />
Basisvektoren e<strong>in</strong>es kovarianten Systems<br />
Nach skalarer Multiplikation der Gleichungen mit den kovarianten Basisvektoren folgen die<br />
Metrik-Koeffizienten, wenn man für die Skalarprodukte zwischen ko- und kontravarianten<br />
Basisvektoren gemäß der Def<strong>in</strong>ition null oder e<strong>in</strong>s e<strong>in</strong>setzt:<br />
1<br />
g g<br />
1<br />
g g<br />
1<br />
g g<br />
1<br />
2<br />
3<br />
= g<br />
= g<br />
= g<br />
11<br />
12<br />
13<br />
1<br />
g g<br />
g<br />
g<br />
2<br />
2<br />
g<br />
g<br />
2<br />
2<br />
3<br />
= g<br />
= g<br />
= g<br />
12<br />
22<br />
23<br />
1<br />
g g<br />
g<br />
g<br />
2<br />
3<br />
g<br />
g<br />
3<br />
3<br />
3<br />
= g<br />
= g<br />
= g<br />
13<br />
23<br />
33<br />
Die Skalarprodukte s<strong>in</strong>d kommutativ, <strong>des</strong>halb ist<br />
kl<br />
die Matrix g symmetrisch, mit sechs<br />
unabhängigen Komponenten.<br />
Tabelle 14 Kontravariante Metrik-Koeffizienten<br />
Aus der Def<strong>in</strong>ition der Skalarprodukte folgt, dass die kontravarianten Metrik-Koeffizienten die<br />
Information über die Beträge der kontravarianten Basisvektoren und die W<strong>in</strong>kel zwischen ihnen<br />
enthalten:<br />
12<br />
1 11<br />
2<br />
g = g<br />
cos( 1 , g ) =<br />
11 22<br />
g<br />
g<br />
3<br />
g cos( g<br />
1 , g ) =<br />
11 33<br />
⋅ g<br />
g<br />
g<br />
13<br />
⋅ g<br />
23<br />
2 22<br />
3<br />
g = g<br />
cos( g<br />
2 , g ) =<br />
22 33<br />
g<br />
g<br />
⋅ g<br />
g<br />
3<br />
=<br />
g<br />
33<br />
Tabelle 15 Beträge der kontravarianten Basisvektoren und die W<strong>in</strong>kel zwischen ihnen<br />
Die analogen Gleichungen gelten bei Formulierung der kovarianten Basisvektoren im<br />
kontravarianten System, aus beiden Gleichungen, <strong>in</strong>e<strong>in</strong>ander e<strong>in</strong>gesetzt wie <strong>in</strong> bei der<br />
Berechnung der Matrixelemente zur Transformation auf orthogonale Koord<strong>in</strong>aten.
15<br />
g = g g<br />
k<br />
k<br />
g =<br />
kl<br />
l<br />
kl<br />
g g<br />
l<br />
kovariante Basisvektoren im kontravarianten<br />
System<br />
kontravariante Basisvektoren im kovarianten<br />
System<br />
Analog zu Tabelle 7 und Tabelle 9 gilt für den Zusammenhang zwischen beiden Komponenten:<br />
g<br />
kl<br />
⋅ g<br />
lm<br />
= δ<br />
k<br />
m<br />
Orthogonalitätsrelation zwischen den ko- und<br />
kontravarianten Metrik-Koeffizienten<br />
g<br />
g<br />
kl<br />
kl<br />
1 k+<br />
l<br />
( −1<br />
U ( g<br />
kl<br />
) Kontravariante Metrik-Koeffizienten, berechnet<br />
kl<br />
aus den kovarianten<br />
= )<br />
g<br />
kl<br />
( g )<br />
1 k + l<br />
Kovariante Metrik-Koeffizienten, berechnet aus<br />
= ( −1)<br />
kl<br />
g<br />
U<br />
den kontravarianten<br />
Tabelle 16 Zusammenhang zwischen der ko- und kontravarianten Metrik-Koeffizienten<br />
Die Metrik Koeffizienten s<strong>in</strong>d <strong>des</strong>halb so wichtig, weil sie die Information über die Längen der<br />
Basisvektoren und der W<strong>in</strong>kel zwischen ihnen enthalten. Sie ersetzen somit die Angabe der<br />
Koord<strong>in</strong>aten der drei kovarianten Basisvektoren <strong>in</strong> e<strong>in</strong>em orthonormierten Koord<strong>in</strong>atensystem,<br />
die auch neun Zahlen erfordern würde.<br />
Wenn <strong>in</strong> der Anwendung oft Skalarprodukte zu bilden s<strong>in</strong>d, dann ist <strong>in</strong> schiefw<strong>in</strong>kligen oder<br />
orthogonalen, aber nicht normierten Koord<strong>in</strong>atensystemen die Formulierung der Vektoren <strong>in</strong> kobzw.<br />
kontravarianten Basen der Angabe der kartesischen Koord<strong>in</strong>aten vorzuziehen. Die<br />
Berechnung der Skalarprodukte wird, mit Nutzung der Metrik Koeffizienten, besonders e<strong>in</strong>fach.
16<br />
2.4.2 Beziehungen zwischen den ko- und kontravarianten<br />
Vektorkomponenten<br />
Multiplikation mit e<strong>in</strong>em passenden Metrik Koeffizienten wandelt, für e<strong>in</strong>en beliebigen Vektor,<br />
e<strong>in</strong>e kovariante <strong>in</strong> e<strong>in</strong>e kontravariante Komponente um:<br />
A =<br />
1 2 3<br />
1 2<br />
A g1<br />
+ A g<br />
2<br />
+ A g<br />
3<br />
= A1g<br />
+ A2g<br />
+<br />
k<br />
A = A g<br />
k<br />
=<br />
l k<br />
A ⋅ g = A g<br />
k l<br />
A ⋅δ<br />
k<br />
=<br />
A<br />
k<br />
A g<br />
k<br />
g<br />
k<br />
⋅ g<br />
kl<br />
l<br />
k<br />
= A g<br />
k<br />
k<br />
l<br />
A =<br />
⋅ g<br />
g<br />
A = g<br />
l<br />
lk<br />
l<br />
l k<br />
A<br />
A<br />
k<br />
k<br />
A g<br />
3<br />
3<br />
Vektor A im ko- und kontravarianten<br />
Koord<strong>in</strong>atensystem<br />
Skalare Multiplikation mit dem kontravarianten<br />
l<br />
Basisvektor ⋅ g zeigt, wegen der Orthogonalität<br />
der ko- und kontravarianten Basisvektoren, die<br />
Beziehung zwischen den ko- und<br />
kontravarianten Komponenten<br />
Multiplikation mit e<strong>in</strong>em entsprechenden<br />
Metrik-Koeffizienten wandelt e<strong>in</strong>e kovariante<strong>in</strong><br />
e<strong>in</strong>e kontravariante Komponente um,„zieht<br />
den Index herauf“<br />
Anlog: Umwandlung e<strong>in</strong>er Kontra- <strong>in</strong> e<strong>in</strong>e<br />
kovariante Komponente, der Index wird<br />
„heruntergezogen“.<br />
Tabelle 17 Herauf- und Herabziehen e<strong>in</strong>es Index: Übergang von ko- zu kontravarianten<br />
Komponenten durch Multiplikation mit Metrik-Koeffizienten<br />
2.5 Transformation der ko- und kontravarianten Komponenten bei<br />
Wechsel <strong>des</strong> Bezugssystems<br />
Die Transformationseigenschaften bei Wechsel <strong>des</strong> Koord<strong>in</strong>atensystems für ko- und<br />
kontravarianten Basisvektoren ist e<strong>in</strong>e charakteristische Eigenschaft dieser Basissysteme. Die<br />
Form <strong>des</strong> Transformationsgesetzes für die Komponenten e<strong>in</strong>es Vektors dient schließlich zur<br />
Def<strong>in</strong>ition e<strong>in</strong>es Tensors.<br />
E<strong>in</strong> beliebiger Vektor werde zunächst im kovarianten Koord<strong>in</strong>atensystem formuliert. Dann wird<br />
das Koord<strong>in</strong>atensystem gewechselt. Aus dem Transformationsgesetz für die kovarianten<br />
Basisvektoren folgt das Transformationsgesetz für die kontravarianten Komponenten <strong>des</strong><br />
Vektors. Man erkennt, dass sich die kontravarianten Basisvektoren wie die kontravarianten<br />
Komponenten transformieren.<br />
Die Basisvektoren und Komponenten bei Aufstellung e<strong>in</strong>es Vektors im neuen<br />
Koord<strong>in</strong>atensystem, B , werden durch e<strong>in</strong>en Querstrich gekennzeichnet. Das ursprüngliche<br />
Koord<strong>in</strong>atensystem sei mit B bezeichnet
17<br />
Aufstellung <strong>in</strong> kovarianten Basisvektoren:<br />
Vektor A aufgestellt <strong>in</strong> kovarianten Basisvektoren, kontravarianten Komponenten<br />
k<br />
A g<br />
k<br />
A = aufgestellt im Koord<strong>in</strong>atensystem B.<br />
k<br />
A gk<br />
A = aufgestellt im Koord<strong>in</strong>atensystem B<br />
Tabelle 18 Aufstellung e<strong>in</strong>es beliebigen Vektors <strong>in</strong> zwei Koord<strong>in</strong>atensystemen B und B<br />
Transformation der kovarianten Basisvektoren<br />
g = a g<br />
k<br />
k<br />
l<br />
k<br />
l<br />
k<br />
g = a g<br />
l<br />
l<br />
Aufstellung der kovarianten Basisvektoren im<br />
System B <strong>in</strong> kovarianten Basisvektoren im<br />
Koord<strong>in</strong>atensystem B<br />
Aufstellung der kovarianten Basisvektoren im<br />
Koord<strong>in</strong>atensystem B <strong>in</strong> Richtung der<br />
kovarianten Basen im Koord<strong>in</strong>atensystem B:<br />
Transformationsgesetz der kovarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
Tabelle 19 Aufstellung der kovarianten Basisvektoren <strong>in</strong> zwei Koord<strong>in</strong>atensystemen B und B<br />
Analog zu dem <strong>in</strong> Tabelle 6 und Tabelle 7 gezeigten Weg erhält man e<strong>in</strong>e Beziehung zwischen<br />
l<br />
m<br />
den Transformationskoeffizienten der Basisvektoren, wenn man <strong>in</strong> g<br />
k<br />
= a<br />
kg<br />
l<br />
g<br />
l<br />
= al<br />
gm<br />
e<strong>in</strong>setzt:<br />
l l m<br />
Aus dem Vergleich der Koeffizienten vor<br />
g<br />
k<br />
= a<br />
kg<br />
l<br />
= a<br />
k<br />
al<br />
g<br />
m<br />
gleichen Basisvektoren folgt:<br />
l m m<br />
a kal<br />
= δ<br />
Neun Gleichungen für k , m = 1,2, 3<br />
k<br />
Lösungen dieses Gleichungssystem für die Koeffizienten der Transformationsmatrix der<br />
Basisvektoren<br />
k<br />
k l l<br />
a 1 Koeffizienten der kovarianten Basisvektoren<br />
l<br />
= ( −1)<br />
+ U ( a<br />
k<br />
)<br />
k<br />
0<br />
a<br />
aus B bei Aufstellung im System B<br />
l<br />
l<br />
( a )<br />
k<br />
k l<br />
al<br />
=<br />
1 ( −1)<br />
+ U<br />
k<br />
0k<br />
a<br />
l<br />
Tabelle 20 Transformationsmatrix für die kovarianten Basisvektoren<br />
Koeffizienten der kovarianten Basisvektoren<br />
aus B bei Aufstellung im System B
18<br />
Das Transformationsgesetz für die kontravarianten Komponenten e<strong>in</strong>es beliebigen Vektors folgt<br />
A =<br />
k<br />
A g<br />
k<br />
Vektor A <strong>in</strong> kovarianten Basisvektoren,<br />
aufgestellt im System Koord<strong>in</strong>atensystem B.<br />
k l<br />
l<br />
A = A ak<br />
gl<br />
k<br />
ak<br />
gl<br />
A =<br />
k<br />
A gk<br />
g = e<strong>in</strong>gesetzt<br />
Vektor A <strong>in</strong> kovarianten Basisvektoren,<br />
aufgestellt im System Koord<strong>in</strong>atensystem B .<br />
Der Vergleich der Koeffizienten vor gleichen Vektoren g<br />
k<br />
, k=1,2,3, zeigt:<br />
k<br />
A =<br />
a<br />
k<br />
l<br />
A<br />
l<br />
Transformationsgesetz für die kontravarianten<br />
Komponenten e<strong>in</strong>es Vektors beim Übergang <strong>in</strong><br />
das Koord<strong>in</strong>atensystem B<br />
Tabelle 21 Aufstellung e<strong>in</strong>es beliebigen Vektors und se<strong>in</strong>er kovarianten Basisvektoren <strong>in</strong> zwei<br />
Koord<strong>in</strong>atensystemen B und B<br />
Aufstellung <strong>in</strong> kontravarianten Basisvektoren:<br />
Transformation der kontravarianten Basisvektoren<br />
k<br />
g =<br />
k<br />
l<br />
b g<br />
l<br />
Aufstellung der kontravarianten Basisvektoren<br />
im System B <strong>in</strong> kontravarianten Basen im<br />
Koord<strong>in</strong>atensystem B<br />
k<br />
g =<br />
b g<br />
k<br />
l<br />
l<br />
Aufstellung der kontravarianten Basisvektoren<br />
im Koord<strong>in</strong>atensystem B <strong>in</strong> Richtung der<br />
kontravarianten Basen im Koord<strong>in</strong>atensystem<br />
B:<br />
Transformationsgesetz für die kontravarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
Tabelle 22 Aufstellung der kovarianten Basisvektoren <strong>in</strong> zwei Koord<strong>in</strong>atensystemen B und B<br />
k<br />
Es wird nun gezeigt, dass die - zunächst noch unbekannten - Koeffizienten b<br />
l<br />
und die<br />
l<br />
Koeffizienten a<br />
k<br />
der Transformation der kontravarianten Komponenten (Tabelle 21) identisch<br />
s<strong>in</strong>d:
19<br />
k<br />
g =<br />
b g<br />
k<br />
m<br />
m<br />
Aufstellung der kontravarianten Basisvektoren<br />
im Koord<strong>in</strong>atensystem B <strong>in</strong> Richtung der<br />
kontravarianten Basen im Koord<strong>in</strong>atensystem<br />
B.<br />
Multiplikation mit dem kovarianten Basisvektor<br />
⋅ gl<br />
g<br />
k<br />
⋅ g<br />
l<br />
= b<br />
k<br />
m<br />
g<br />
m<br />
⋅ g<br />
l<br />
= δ<br />
k<br />
l<br />
ko- und kontravariante Basisvektoren s<strong>in</strong>d <strong>in</strong><br />
allen Koord<strong>in</strong>atensystemen orthogonal.<br />
b<br />
k<br />
m<br />
g<br />
m<br />
n<br />
l<br />
⋅ a g<br />
b<br />
n<br />
= b<br />
k m<br />
m<br />
a<br />
l<br />
k<br />
m<br />
= δ<br />
n<br />
l<br />
a δ = δ<br />
k<br />
l<br />
n<br />
m<br />
k<br />
l<br />
Mit Substitution<br />
g<br />
m<br />
⋅ g<br />
n<br />
= δ<br />
m<br />
n<br />
l<br />
n<br />
l<br />
g = a g<br />
n<br />
, wegen<br />
a<br />
k m<br />
m<br />
a<br />
l<br />
= δ<br />
k<br />
l<br />
Vergleich mit der Beziehung zwischen den<br />
kontravarianten Komponenten der kovarianten<br />
Basisvektoren (Tabelle 20, mit geeigneter Wahl<br />
der Indizes)<br />
Aus dem Koeffizientenvergleich für<br />
b = a<br />
k<br />
m<br />
k<br />
m<br />
m<br />
a<br />
l<br />
<strong>in</strong> den beiden letzten Gleichungen folgt:<br />
Tabelle 23 Transformation der kontravarianten Basisvektoren.<br />
Bei Übergang <strong>in</strong> das System B transformieren<br />
sich die kontravarianten Basisvektoren wie<br />
die kontravarianten Komponenten e<strong>in</strong>es<br />
Vektors (Tabelle 21)<br />
Zusammenfassend: Die Bezeichnung ko- bzw. kontravariant zeigt das Transformationsverhalten<br />
bei Wechsel <strong>des</strong> Koord<strong>in</strong>atensystems. Es gilt:<br />
k<br />
A =<br />
k<br />
g =<br />
a<br />
A = a<br />
k<br />
k<br />
l<br />
k<br />
l<br />
A<br />
a g<br />
l<br />
k<br />
l<br />
k<br />
A<br />
g = a g<br />
k<br />
l<br />
l<br />
l<br />
l<br />
Die kontravarianten Komponenten<br />
e<strong>in</strong>es Vektors transformieren sich wie<br />
die kontravarianten Basisvektoren<br />
Die kovarianten Komponenten e<strong>in</strong>es<br />
Vektors transformieren sich wie die<br />
kovarianten Basisvektoren<br />
Tabelle 24 Def<strong>in</strong>ition von ko- und kontravarianten Größen durch ihr Transformationsverhalten<br />
bei Wechsel <strong>des</strong> Koord<strong>in</strong>atensystems.<br />
(Man beachte aber, dass e<strong>in</strong>e Aufstellung <strong>in</strong> kontravarianten Koord<strong>in</strong>aten e<strong>in</strong>e kovariante Basis<br />
voraussetzt und umgekehrt.)
20<br />
l<br />
Transformiert sich e<strong>in</strong>e e<strong>in</strong>fach <strong>in</strong>dizierte Größe nach diesen Gesetzen, dann s<strong>in</strong>d A die<br />
kontravarianten Komponenten e<strong>in</strong>es Tensors 1. Stufe, analog Al<br />
die kovarianten Komponenten.<br />
Dieses Transformationsverhalten ist e<strong>in</strong>e für Tensoren charakteristische Eigenschaft.<br />
3 Tensoren höherer Stufe<br />
Die Eigenschaft, Objekte durch ihre Transformationseigenschaft bei Wechsel <strong>des</strong><br />
Koord<strong>in</strong>atensystems zu charakterisieren, dehnt den Begriff <strong>des</strong> Tensors sowohl auf Skalare ( z. B.<br />
2<br />
3<br />
Änderung e<strong>in</strong>er Längenangabe) , Vektoren aus R und R aus. Bei geeigneter Konstruktion lässt<br />
sich die oben angegebene Transformationsvorschrift auf Vektoren e<strong>in</strong>es höher-dimensionalen<br />
Vektorraums ausdehnen. Diese Vektoren werden als „Tensoren höherer Stufe“ bezeichnet. Der<br />
folgende Abschnitt zeigt die Konstruktionsvorschrift, zunächst für Tensoren zweiter Stufe.<br />
3.1 Tensoren 2. Stufe<br />
3<br />
Im R seien zwei Vektoren gegeben. Für diese wird e<strong>in</strong> neues Produkt, das „tensorielle Produkt“<br />
e<strong>in</strong>geführt. Es ist das Ziel bei der im folgenden angegebenen Vorschrift, dass das Produkt die<br />
<strong>Eigenschaften</strong> e<strong>in</strong>es Elements e<strong>in</strong>es Vektorraums trägt.<br />
x , y<br />
Vektoren aus<br />
3<br />
R<br />
T = xy<br />
Tensorielles Produkt<br />
Das tensorielle Produkt genüge dem Distributivgesetz:<br />
x , y , z<br />
x ( y + z)<br />
= xy + xz<br />
( x + y)<br />
z = xz + yz<br />
Außerdem gelte das Assoziativgesetz:<br />
x , y<br />
α<br />
( α x) y x( αy) = αxy<br />
Vektoren aus<br />
3<br />
R<br />
Distributivgesetz<br />
Vektoren aus<br />
Skalar<br />
3<br />
R<br />
= Assoziativgesetz<br />
Tabelle 25 Def<strong>in</strong>ition <strong>des</strong> tensoriellen Produkts
21<br />
Das tensorielle Produkt kann auf Produkte zwischen Basisvektoren zurückgeführt werden, wenn<br />
die Vektoren x , y <strong>in</strong> e<strong>in</strong>er Basis aufgestellt s<strong>in</strong>d:<br />
x =<br />
y =<br />
k<br />
x g<br />
k<br />
k<br />
y g<br />
k<br />
g<br />
k<br />
k l k l<br />
k l<br />
( x g<br />
k<br />
)( y g<br />
l<br />
) = x y g<br />
k l<br />
= x y γ<br />
k l<br />
T = xy =<br />
g<br />
γ<br />
kl<br />
= g<br />
k<br />
g<br />
kl k<br />
γ ' = g g<br />
γ ' = g<br />
l<br />
k<br />
k<br />
g<br />
l<br />
l<br />
l<br />
L<strong>in</strong>earkomb<strong>in</strong>ationen für x und y aus<br />
kovarianten Basisvektoren e<strong>in</strong>es geme<strong>in</strong>samen<br />
Koord<strong>in</strong>atensystems. (Die Basisvektoren, z. B.<br />
für beide oder nur für e<strong>in</strong>en, könnten aber auch<br />
zum kontravarianten System gehören. s. u. )<br />
k=1,2,3 Basisvektoren für x , y<br />
L<strong>in</strong>earkomb<strong>in</strong>ation aus neun tensoriellen<br />
Produkten der Basisvektoren, umgeformt nach<br />
den Gesetzen <strong>in</strong> Tabelle 25.<br />
Diese Produkte bilden e<strong>in</strong>e doppelt <strong>in</strong>dizierte<br />
kovariante Basis für den Raum von T<br />
kontravariante Basis, falls x und y <strong>in</strong><br />
kontravarianten Basisvektoren geben s<strong>in</strong>d<br />
Gemischte Basis, falls nur die Basisvektoren<br />
von y oder<br />
( )<br />
γ kl<br />
' = g<br />
k k<br />
γ<br />
l<br />
g<br />
l<br />
nur von. x zum kontravarianten System gehört<br />
⎛γ<br />
⎜<br />
= ⎜γ<br />
⎜<br />
⎝γ<br />
11<br />
21<br />
31<br />
γ<br />
γ<br />
γ<br />
12<br />
22<br />
32<br />
γ<br />
13 ⎞<br />
⎟<br />
γ<br />
23 ⎟<br />
γ ⎟<br />
33 ⎠<br />
Formulierung <strong>des</strong> Tensors bei unterschiedlicher Wahl der Basis:<br />
kl<br />
k k l l<br />
T = t g<br />
kg<br />
l<br />
= tl<br />
g g<br />
l<br />
= tk<br />
g<br />
kg<br />
=<br />
Tabelle 26 Formulierung e<strong>in</strong>es Tensors 2. Stufe<br />
t<br />
kl<br />
g<br />
k<br />
g<br />
l<br />
Die Produkte können zu e<strong>in</strong>em quadratischen<br />
Schema zusammengefasst werden<br />
Beliebiges Element <strong>des</strong> Vektorraums, die<br />
Formulierung zeigt das<br />
Transformationsverhalten der gewählten Basis,<br />
ko- oder kontravariant.<br />
Bei praktischen Anwendungen kann das Koord<strong>in</strong>atensystem z. B. durch die Richtung e<strong>in</strong>er<br />
Feldstärke ( etwa der Gravitationskraft ) vorgegeben se<strong>in</strong>. Es sei z. B. die Verformung e<strong>in</strong>es<br />
Körpers <strong>in</strong> e<strong>in</strong>er bestimmten Lage im Feld von Interesse.
22<br />
3.1.1 Transformation der Komponenten e<strong>in</strong>es Tensors 2. Stufe bei Wechsel<br />
<strong>des</strong> Bezugssystems<br />
Bei Wechsel <strong>des</strong> Bezugsystems werden die Basisvektoren e<strong>in</strong>es Tensors im neuen<br />
Koord<strong>in</strong>atensystem formuliert. Der Tensor selbst bleibt unverändert, <strong>des</strong>halb ändern sich se<strong>in</strong>e<br />
Koord<strong>in</strong>aten. Die Transformation der Komponenten erhält man analog zu der Transformation der<br />
ko- und kontravarianten Komponenten bei Wechsel <strong>des</strong> Bezugssystems für Vektoren durch bei<br />
Vergleich der Koeffizienten <strong>des</strong> im alten und neuen System formulierten Tensors. Man formuliert<br />
die dazu alten Basisvektoren im neuen Bezugssystem:<br />
Transformation der kovarianten Basisvektoren<br />
i<br />
j<br />
i<br />
g = a g<br />
i<br />
j<br />
i<br />
j<br />
g = a g<br />
Rücktransformation<br />
j<br />
Transformationsgesetz der kovarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
k<br />
g =<br />
a g<br />
k<br />
l<br />
l<br />
Transformationsgesetz für die kontravarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
a g<br />
k k l<br />
g =<br />
l<br />
Rücktransformation<br />
Tabelle 27 Transformationsgesetz ko- und kontravarianter Basisvektoren (vgl. Tabelle 24)<br />
ij<br />
T = t gig<br />
j<br />
=<br />
t<br />
ij<br />
g g = t<br />
i<br />
j<br />
kl<br />
a<br />
i<br />
k<br />
t<br />
a<br />
kl<br />
j<br />
l<br />
g<br />
k<br />
i<br />
g<br />
l<br />
g g<br />
j<br />
Tabelle 28 Transformation e<strong>in</strong>es Tensors 2. Stufe mit „oberen Indizes“<br />
Tensor 2. Stufe <strong>in</strong> beiden Koord<strong>in</strong>atensystemen<br />
formuliert<br />
Die Basisvektoren gi<br />
im System B werden mit<br />
g<br />
j<br />
aus dem Koord<strong>in</strong>atensystem B formuliert.<br />
Das Transformationsgesetz für die Komponenten folgt aus dem Koeffizientenvergleich vor<br />
gleichen Produkten g g : i j<br />
kl<br />
ij<br />
t =<br />
a<br />
i<br />
k<br />
a<br />
j<br />
l<br />
Mit analogen Rechnungen folgt:<br />
t = a<br />
ij<br />
i<br />
t j =<br />
j<br />
i<br />
a<br />
t = a<br />
k<br />
i<br />
i<br />
k<br />
k<br />
i<br />
a<br />
a<br />
a<br />
l<br />
j<br />
t<br />
t<br />
l<br />
j<br />
t<br />
kl<br />
k<br />
l<br />
j l<br />
l<br />
tk<br />
Jeder obere Index transformiert sich wie e<strong>in</strong><br />
kontravarianter Vektor<br />
Jeder untere Index transformiert sich wie e<strong>in</strong><br />
kovarianter Vektor<br />
Gemischte Indizes:<br />
Jeder obere Index transformiert sich wie e<strong>in</strong><br />
kontravarianter Vektor und jeder untere wie e<strong>in</strong><br />
kovarianter
23<br />
Tabelle 29 Transformation der Komponenten e<strong>in</strong>es Tensors 2. Stufe mit unteren, oberen und<br />
gemischten Indizes bei Wechsel zum System B<br />
Die Umkehrung dazu:<br />
t = a<br />
ij<br />
ij<br />
t =<br />
t i<br />
j =<br />
j<br />
i<br />
a<br />
a<br />
k<br />
i<br />
i<br />
k<br />
t = a<br />
i<br />
k<br />
k<br />
i<br />
a<br />
a<br />
a<br />
a<br />
l<br />
j<br />
j<br />
l<br />
l<br />
j<br />
t<br />
t<br />
t<br />
kl<br />
kl<br />
k<br />
l<br />
j l<br />
l<br />
tk<br />
Tabelle 30 Rücktransformationen bei Wechsel <strong>des</strong> Koord<strong>in</strong>atensystems<br />
Komponenten <strong>des</strong> Tensors im alten<br />
Koord<strong>in</strong>atensystem B als Funktion der<br />
Komponenten <strong>des</strong> Tensors im neuen Systems<br />
B<br />
Diese Beziehungen werden bei Tensoren höherer Stufe entsprechend erweitert.<br />
3.1.2 Der Metriktensor<br />
Die verjüngende Multiplikation e<strong>in</strong>es beliebigen Vektors mit dem Metriktensor von l<strong>in</strong>ks oder<br />
von rechts reproduziert den Vektor: Der Metriktensor verhält sich also, bezüglich dieser<br />
Multiplikation, wie e<strong>in</strong> E<strong>in</strong>s-Element.<br />
Beweis:<br />
E =<br />
ij<br />
g<br />
g g<br />
i<br />
j<br />
E ⋅ a = a ⋅ E = a<br />
Das verjüngende Produkt <strong>des</strong> Metriktensors<br />
E mit e<strong>in</strong>em Vektor a von l<strong>in</strong>ks oder von<br />
rechts ergibt den Vektor a<br />
Metriktensor <strong>in</strong> kontravarianten<br />
Komponenten, „kontravarianter<br />
Metriktensor“<br />
k<br />
a g<br />
k<br />
a = Vektor <strong>in</strong> kontravarianten Komponenten<br />
Wegen der Orthogonalitätsrelation zwischen den Metrik-Koeffizienten (Tabelle 16) gilt:<br />
E ⋅a<br />
= g<br />
g g<br />
k i<br />
= a g δ = a<br />
i<br />
k<br />
a ⋅ E = a<br />
= g<br />
ij<br />
a<br />
k<br />
g<br />
ij<br />
k<br />
g<br />
ik<br />
i<br />
k<br />
g<br />
j<br />
k<br />
⋅ a<br />
g<br />
⋅ g<br />
j<br />
ij<br />
k<br />
k<br />
g<br />
k<br />
= a<br />
g g<br />
i<br />
= g<br />
= g<br />
ij<br />
a<br />
k k<br />
= a g δ = a<br />
j<br />
j<br />
j<br />
ij<br />
a<br />
k<br />
k<br />
k<br />
g<br />
g<br />
g<br />
i<br />
k<br />
ki<br />
g<br />
g<br />
jk<br />
j<br />
= a<br />
Tabelle 31 Multiplikation <strong>des</strong> Metriktensors mit e<strong>in</strong>em Vektor<br />
Verjüngende Multiplikation <strong>des</strong> Vektors a<br />
von rechts (.)<br />
Verjüngende Multiplikation <strong>des</strong> Vektors a<br />
von l<strong>in</strong>ks<br />
Analoges gilt für den Metriktensor <strong>in</strong> kovarianten Komponenten, den „kovarianter Metriktensor“.<br />
Der gemischte Metriktensor ist das Kronecker Symbol, er wird auch „Kronecker Tensor“<br />
genannt.
24<br />
3.1.3 Der Spannungstensor (Stress Tensor)<br />
E<strong>in</strong> Körper ist durch se<strong>in</strong>e Oberfläche nach außen abgegrenzt. Wenn auf den Körper Kräfte<br />
wirken, dann gibt es zwei Fälle zu unterscheiden:<br />
• Die Kräfte entstehen durch die Massen im Innern <strong>des</strong> Körpers, bei der Gravitationskraft<br />
und den Trägheitskräften bei beschleunigter Bewegung. Die Kräfte s<strong>in</strong>d, bei Annahme<br />
konstanter Dichte, zum Volumen proportional.<br />
• Die Kräfte werden durch das den Körper umgebende Material auf den Körper übertragen,<br />
und das geht nur über die Oberfläche. Diese Kräfte s<strong>in</strong>d proportional zur Oberfläche.<br />
Bezogen auf die Fläche vom Betrag e<strong>in</strong>s werden sie als Spannung (Stress) bezeichnet.<br />
Der Spannungstensor formuliert die durch die Oberflächen übertragenen Kräfte. Homogen wird<br />
die Spannung genannt, wenn die Kräfte auf die Oberflächen e<strong>in</strong>es Probe-Elements unabhängig<br />
vom Ort dieses Elements s<strong>in</strong>d.<br />
F<br />
F<br />
g<br />
3<br />
σ<br />
33<br />
σ<br />
23<br />
σ<br />
σ 32<br />
13<br />
σ<br />
31<br />
σ<br />
22<br />
σ<br />
11<br />
σ<br />
21<br />
σ<br />
12<br />
g<br />
2<br />
g<br />
1<br />
Abbildung 3 Oben rechts: E<strong>in</strong>gespannter Körper, auf die Platten wirke die Kraft F (die Platten<br />
seien an den Körper geklebt).Kle<strong>in</strong> e<strong>in</strong>gezeichnet ist der Probe-Würfel. Unten l<strong>in</strong>ks: Kräfte auf
25<br />
den Probewürfel, se<strong>in</strong>e Kantenlängen seien e<strong>in</strong>s. Die e<strong>in</strong>gezeichneten Kraftkomponenten σ<br />
ik<br />
auf<br />
die Flächen vom Betrag e<strong>in</strong>s s<strong>in</strong>d die Komponenten <strong>des</strong> Spannungstensors.<br />
Zur Veranschaulichung kann man sich vorstellen, dass die oben e<strong>in</strong>gezeichneten Vektoren für<br />
σ<br />
ik<br />
die Auslenkung von Federwaagen anzeigen, mit denen die entsprechenden Flächen <strong>in</strong> den<br />
Ruhelagen gehalten werden. Ohne äußere Kräfte zeigen alle null.<br />
Setzt man den Ursprung <strong>des</strong> Koord<strong>in</strong>atensystems <strong>in</strong> die Mitte <strong>des</strong> Probewürfels, dann zeigt e<strong>in</strong><br />
positives Vorzeichen von σ<br />
ik<br />
, dass an der Fläche senkrecht zu g<br />
k<br />
das Material außerhalb <strong>des</strong><br />
Würfels das Material <strong>in</strong>nerhalb <strong>in</strong> Richtung von + g i<br />
zieht. Das gilt für die Flächen an<br />
Achsenabschnitten mit positiven Koord<strong>in</strong>aten. An Flächen mit negativen Achsenabschnitten<br />
werden die Vorzeichen so gewählt, dass bei homogener Dehnung die am Würfel angreifenden<br />
Kräfte ke<strong>in</strong> resultieren<strong>des</strong> Drehmoment oder e<strong>in</strong>e <strong>in</strong> e<strong>in</strong>er Richtung beschleunigende Kraft<br />
erzeugen.<br />
g<br />
3<br />
Drehachse<br />
σ 33<br />
σ<br />
23<br />
σ<br />
32<br />
σ<br />
22<br />
g<br />
2<br />
σ<br />
22<br />
σ<br />
32<br />
g<br />
1<br />
σ<br />
23<br />
σ<br />
33<br />
Abbildung 4 Spannungskräfte bei positivem Vorzeichen aller Tensorkomponenten. Die Spannung<br />
sei homogen, der Probewürfel sei bezüglich der e<strong>in</strong>gezeichneten Achse Drehmoment frei, es gilt<br />
also σ = σ .<br />
ik<br />
ki<br />
Aus der Abbildung erkennt man, dass Tensorkomponenten mit positivem Vorzeichen e<strong>in</strong>e<br />
Dehnung <strong>des</strong> Volumenelements beschreiben. Die Elemente außerhalb der Diagonalen werden so<br />
gewählt, dass auch bei <strong>in</strong>homogener Spannung, im Grenzfall verschw<strong>in</strong>denden Volumens <strong>des</strong><br />
Probewürfels, die Drehmomente zu vernachlässigen s<strong>in</strong>d. Dazu def<strong>in</strong>iert man:<br />
σ<br />
ik<br />
= σ ki<br />
Bed<strong>in</strong>gung für verschw<strong>in</strong>dende Drehmomente<br />
Tabelle 32 Der Spannungstensor ist symmetrisch
26<br />
Im gezeichneten Beispiel <strong>in</strong> Abbildung 3 ist die Spannung nur <strong>in</strong> der Mitte <strong>des</strong> e<strong>in</strong>gespannten<br />
Körpers e<strong>in</strong>igermaßen homogen, nach außen, weit entfernt von den die Spannung verursachenden<br />
Auflagen, nehmen die Komponenten <strong>des</strong> Spannungstensors zu Null ab.<br />
Der Spannungstensor wird meistens mit e<strong>in</strong>em orthonormierten Basissystem formuliert. Ko- und<br />
kontravariante Komponenten s<strong>in</strong>d dann identisch, man schreibt gewöhnlich beide Indizes nach<br />
unten, σ , formal also kovariante Komponenten.<br />
ik<br />
E<strong>in</strong> Tensor zweiten Gra<strong>des</strong> verknüpft mit e<strong>in</strong>em verjüngenden Produkt zwei vektorielle<br />
<strong>Eigenschaften</strong>. Diese Eigenschaft muss für die <strong>in</strong> der Abbildung e<strong>in</strong>geführten<br />
Spannungskomponenten σ<br />
ik<br />
nachgewiesen werden. Man prüft <strong>des</strong>halb für e<strong>in</strong>e gegebene Fläche<br />
dA, ob sich der Vektor der Spannung als verjüngen<strong>des</strong> Produkt <strong>des</strong> Spannungstensors mit der<br />
Flächennormalen formulieren lässt.<br />
Zur Nomenklatur: Für die Kräfte pro Fläche wird das Symbol t („tensile“) gewählt, F („force“)<br />
steht für die Kraft, A („area“) für die Normale zur Fläche, n für die auf e<strong>in</strong>s normierte<br />
Flächennormale.<br />
g<br />
3<br />
t ⋅ dA<br />
dA<br />
t3<br />
⋅ dA<br />
d F<br />
n<br />
g<br />
2<br />
g<br />
1<br />
t2<br />
⋅ dA<br />
d F<br />
t1<br />
⋅ dA<br />
d F<br />
Abbildung 5 An e<strong>in</strong>em Flächenelement dA mit Normale n wirkende Kraft<br />
orthogonalen Komponenten t1 ⋅ dA , t2 ⋅ dA und t3<br />
⋅ dA<br />
t ⋅ dA und ihre<br />
Man betrachtet e<strong>in</strong> Volumenelement mit Tetraeder-Form und zerlegt die Kraft auf e<strong>in</strong>e durch<br />
ihren auf e<strong>in</strong>s normierten Normalenvektor n gegebene Fläche dA zunächst nach Komponenten <strong>in</strong><br />
Richtung der Basisvektoren. Jede dieser Komponenten wird dann als Summe von Kräften
27<br />
formuliert, die an den drei orthogonalen Flächen ⋅ dA1 , dA2<br />
, dA3<br />
angreifen. Schließlich werden<br />
alle Flächenelemente <strong>in</strong> Komponenten n<br />
1<br />
, n2,<br />
n3<br />
der Normalen n zur Fläche dA formuliert.<br />
t1 ⋅ dA = σ<br />
11<br />
⋅ dA1<br />
+ σ<br />
12<br />
⋅ dA2<br />
+ σ<br />
13<br />
⋅ dA3<br />
t2 ⋅ dA = σ<br />
21<br />
⋅ dA1<br />
+ σ<br />
22<br />
⋅ dA2<br />
+ σ<br />
23<br />
⋅ dA3<br />
t3 ⋅ dA = σ<br />
31<br />
⋅ dA1<br />
+ σ<br />
32<br />
⋅ dA2<br />
+ σ<br />
33<br />
⋅ dA3<br />
Tabelle 33 Zerlegung der Kraft-Komponenten an der Fläche dA.<br />
g<br />
3<br />
Zerlegung der Kraft-Komponente t1 ⋅ dA an der<br />
Fläche dA nach Kräften, die an den drei<br />
orthogonalen Flächen ⋅ dA1, dA2<br />
,dA3<br />
angreifen.<br />
Analoges gilt für t2 ⋅ dA und t3<br />
⋅ dA<br />
dA<br />
2<br />
dA<br />
1<br />
σ<br />
⋅ d<br />
12<br />
A 2<br />
σ<br />
⋅ d<br />
11<br />
A 1<br />
g<br />
2<br />
σ<br />
13<br />
⋅ dA 3<br />
dA<br />
3<br />
g<br />
1<br />
Abbildung 6 Zerlegung der Kraft-Komponente dt1 ⋅ dA an der Fläche dA nach Kräften, die an<br />
den drei orthogonalen Flächen ⋅ dA<br />
1<br />
,dA2,dA3<br />
angreifen<br />
dA = 1<br />
1<br />
2n<br />
n<br />
,<br />
2<br />
3<br />
n , n<br />
1<br />
n2,<br />
1<br />
3<br />
dA = 1<br />
2<br />
2n<br />
n<br />
,<br />
3<br />
1<br />
dA<br />
3<br />
=<br />
2n<br />
n<br />
1 ⎛ 1 1 ⎞ ⎛ 1 1<br />
dA = ⎜ ⋅ g − ⋅<br />
⎟ ×<br />
⎜<br />
1<br />
g<br />
3<br />
⋅ g<br />
2<br />
− ⋅ g<br />
3<br />
2 ⎝ n1<br />
n3<br />
⎠ ⎝ n2<br />
n3<br />
dA 1 1 1 1<br />
= g<br />
3<br />
+ g<br />
2<br />
2 n n n n<br />
+ n n<br />
1<br />
2<br />
1<br />
3<br />
2<br />
3<br />
g<br />
1<br />
1<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
Komponenten der auf e<strong>in</strong>s normierten<br />
Normalen zur Fläche dA<br />
Flächen der orthogonalen, rechtw<strong>in</strong>kligen<br />
Dreiecke im orthonormierten<br />
Koord<strong>in</strong>atensystem n<br />
1, n<br />
2<br />
, n<br />
3<br />
als Funktion<br />
Die Fläche dA ist die Hälfte <strong>des</strong> Betrags<br />
<strong>des</strong> Vektorprodukts aus den Vektoren<br />
zweier Seiten
28<br />
2<br />
3<br />
2<br />
( n n n ) 2n1n2n3<br />
1<br />
2<br />
2<br />
2<br />
3<br />
2<br />
1<br />
1 n + n + n<br />
dA =<br />
=<br />
2<br />
1<br />
Tabelle 34 Flächen<strong>in</strong>halte als Funktion der Komponenten n<br />
1<br />
, n2,<br />
n3<br />
der Normalen zur Fläche dA<br />
g<br />
3<br />
1 ⋅ g<br />
n<br />
3<br />
3<br />
d A<br />
1 ⋅ g<br />
n<br />
1<br />
1<br />
g<br />
2<br />
g<br />
1<br />
1<br />
n<br />
2<br />
⋅ g 2<br />
Abbildung 7 Durch die Tetraederfläche mit Normale ( n<br />
1<br />
, n2,<br />
n3<br />
) erzeugte Achsenabschnitte<br />
Setzt man die Flächen<strong>in</strong>halte als Funktion der Komponenten n<br />
1<br />
, n2,<br />
n3<br />
der Normalen <strong>in</strong> Tabelle<br />
33 e<strong>in</strong>, so erkennt man, dass der Spannungsvektor t tatsächlich als verjüngen<strong>des</strong> Produkt <strong>des</strong><br />
Normalenvektors n mit dem Spannungstensor S aufgefasst werden kann:<br />
1<br />
dt1<br />
⋅<br />
n1n2n3<br />
1<br />
dt2<br />
⋅<br />
n1n2n3<br />
1<br />
dt3<br />
⋅<br />
n n n<br />
1<br />
2<br />
3<br />
= σ<br />
= σ<br />
= σ<br />
11<br />
21<br />
31<br />
1<br />
⋅<br />
n2n<br />
1<br />
⋅<br />
n2n<br />
1<br />
⋅<br />
n n<br />
2<br />
3<br />
3<br />
3<br />
+ σ<br />
+ σ<br />
+ σ<br />
12<br />
22<br />
32<br />
1<br />
⋅<br />
n1n<br />
1<br />
⋅<br />
n1n<br />
1<br />
⋅<br />
n n<br />
1<br />
3<br />
3<br />
3<br />
1<br />
+ σ<br />
13<br />
⋅<br />
n1n2<br />
1<br />
+ σ<br />
23<br />
⋅<br />
n1n2<br />
1<br />
+ σ<br />
33<br />
⋅<br />
n n<br />
1<br />
2<br />
Kraftkomponenten der Tabelle 33 , die<br />
Flächen<strong>in</strong>halte s<strong>in</strong>d mit den Komponenten<br />
n , n n formuliert<br />
1 2,<br />
3<br />
dt<br />
dt<br />
dt<br />
1<br />
= σ<br />
11<br />
⋅ n1<br />
+ σ<br />
12<br />
⋅ n2<br />
+ σ<br />
13<br />
⋅ n3<br />
2<br />
= σ<br />
21<br />
⋅ n1<br />
+ σ<br />
22<br />
⋅ n2<br />
+ σ<br />
23<br />
⋅ n3<br />
3<br />
= σ<br />
31<br />
⋅ n1<br />
+ σ<br />
32<br />
⋅ n2<br />
+ σ<br />
33<br />
⋅ n3<br />
Der Spannungsvektor t ist das verjüngende<br />
Produkt <strong>des</strong> Normalenvektors n mit dem<br />
Spannungstensor S<br />
t = S ⋅n<br />
Tabelle 35 Der Spannungstensor <strong>in</strong> Komponenten-Schreibweise
29<br />
Man erkennt das verjüngende Produkt, wenn man mit Basisvektoren formuliert. Bei<br />
orthonormalen Koord<strong>in</strong>atensystemen s<strong>in</strong>d die ko- und kontravariante Basen identisch, die Indizes<br />
können oben oder unten stehen. Um an die Schreibweise für die allgeme<strong>in</strong>en Sätze im<br />
Tensorkalkül anzuschließen, wird hier mit kovarianter Basis formuliert:<br />
S<br />
ij<br />
= σ g<br />
ig<br />
j<br />
Spannungstensor<br />
k<br />
n = n g k<br />
Normale zur ausgewählten Ebene<br />
ij<br />
k<br />
t = σ g<br />
ig<br />
j<br />
⋅ n g<br />
Spannungsvektor: Verjüngen<strong>des</strong> Produkt <strong>des</strong><br />
k<br />
Tensors mit dem Normalenvektor<br />
ij k<br />
t = σ g<br />
<strong>in</strong><br />
( g<br />
j<br />
⋅ g<br />
k<br />
)<br />
Multiplikation mit g<br />
k<br />
zieht den Index k<br />
t = σ ij n g<br />
herunter (Tabelle 17)<br />
t<br />
j<br />
i<br />
i ij<br />
= σ n<br />
j<br />
Komponente <strong>des</strong> Spannungsvektors<br />
Tabelle 36 Der Spannungstensor <strong>in</strong> Basis-bezogener Schreibweise<br />
3.1.4 Die Hauptachsentransformation<br />
Der Spannungstensor zeigt, mit welcher Richtung und welchem Betrag e<strong>in</strong>e Kraft an e<strong>in</strong>er durch<br />
n gegebenen Ebene angreift, wenn der Körper auf irgende<strong>in</strong>e Art von außen unter Spannung<br />
gesetzt wird.<br />
F<br />
n<br />
t<br />
F<br />
F<br />
n<br />
Haupt<br />
t<br />
F
30<br />
Abbildung 8 Spannung <strong>in</strong> unterschiedlichen Ebenen. Oben: beliebige Ebene, unten:<br />
Hauptspannungsebene<br />
Die Komponenten <strong>des</strong> Spannungstensors s<strong>in</strong>d vom Spannungszustand abhängig. Bei<br />
gleichbleibender Spannvorrichtung und Kraft bleiben sie unverändert. Für jeden<br />
Spannungszustand kann man aber an jedem Ort e<strong>in</strong>e Ebene f<strong>in</strong>den, zu der die Richtung der<br />
Spannung senkrecht steht. Diese Ebene heißt „Hauptspannungsebene“.<br />
t = λ ⋅n<br />
Bed<strong>in</strong>gung für die Hauptspannungsebene<br />
t<br />
j<br />
ij<br />
= λ n g<br />
j<br />
= σ<br />
j<br />
λ n g<br />
j<br />
=<br />
k<br />
g g ⋅ n g<br />
i<br />
j<br />
ij<br />
σ n g<br />
i<br />
j<br />
k<br />
Verknüpfung von Spannung und Normale<br />
durch den Tensor<br />
σ<br />
11<br />
σ<br />
σ<br />
j ji<br />
n = g ni<br />
Nach Herabziehen <strong>des</strong> Index folgt:<br />
ji<br />
λ g nig<br />
j<br />
=<br />
12<br />
13<br />
ni<br />
− λ<br />
ij<br />
σ n g<br />
ij ji<br />
( − λ δ ) = 0<br />
i<br />
j<br />
Aus dem Koeffizientenvergleich für g<br />
j<br />
folgt,<br />
<strong>in</strong> orthonormierten Koord<strong>in</strong>atensystemen,<br />
ij ij<br />
wegen g = δ :<br />
σ Homogenes Gleichungssystem für n<br />
1<br />
, n2,<br />
n3<br />
σ<br />
σ<br />
22<br />
σ<br />
12<br />
− λ<br />
23<br />
σ<br />
σ<br />
σ<br />
33<br />
13<br />
23<br />
− λ<br />
= 0<br />
Das Gleichungssystem ist nur lösbar, wenn<br />
diese Determ<strong>in</strong>ante null ist. Aus dieser<br />
Bed<strong>in</strong>gung folgen die drei „Eigenwerte“<br />
λ , λ , λ<br />
Tabelle 37 Aufbau der charakteristischen Gleichung zur Hauptachsentransformation<br />
1<br />
2<br />
3<br />
Für jeden Eigenwert liefert die Lösung <strong>des</strong> homogenen Gleichungssystems e<strong>in</strong>e Richtung, die, im<br />
gegebenen Spannungszustand, auch die der Spannung ist. Für diese Eigenvektoren gilt:<br />
n λ n<br />
ij<br />
σ<br />
i<br />
=<br />
j<br />
Homogenes Gleichungssystem für n<br />
1<br />
, n2,<br />
n3<br />
,<br />
liefert für die drei Eigenlösungen λ , λ , λ<br />
drei Eigenvektoren<br />
1<br />
2<br />
3<br />
n<br />
i<br />
⋅ n<br />
j<br />
= δ<br />
ij<br />
Die Eigenvektoren<br />
1<br />
, n<br />
2<br />
, n<br />
3<br />
n s<strong>in</strong>d orthogonal<br />
Tabelle 38 Eigenvektoren zur Hauptachsentransformation<br />
Die drei orthogonalen Vektoren n<br />
1<br />
, n<br />
2<br />
, n<br />
3<br />
können als Basis e<strong>in</strong>es neuen Koord<strong>in</strong>atensystems<br />
betrachtet werden. Der Übergang von der Basis g<br />
1<br />
, g<br />
2<br />
, g<br />
3<br />
auf die Basis der Eigenvektoren heißt
31<br />
„Hauptachsentransformation“. Ist g<br />
1<br />
, g<br />
2<br />
, g<br />
3<br />
schon orthonormiert, wie oben angenommen, dann<br />
entspricht die Hauptachsentransformation lediglich e<strong>in</strong>er Drehung oder Spiegelung <strong>des</strong><br />
Koord<strong>in</strong>atensystems, also e<strong>in</strong>er orthogonalen Transformation. Die Hauptachsentransformation<br />
führt aber aus beliebigen Basissystemen auf orthogonale Basisvektoren.<br />
3.1.5 Der Dehnungstensor (Stra<strong>in</strong> Tensor)<br />
Zur Formulierung der Ausdehnung <strong>in</strong> e<strong>in</strong>em dreidimensionalen Körper, z. B. <strong>in</strong> e<strong>in</strong>em Kristall,<br />
betrachtet man an der <strong>in</strong>teressierenden Stelle e<strong>in</strong>en kle<strong>in</strong>en Würfel mit Kantenlänge e<strong>in</strong>s, und<br />
richtet ihn nach den Koord<strong>in</strong>atenachsen aus. Wird der Körper verformt, dann verformt sich auch<br />
der Würfel. Die Änderung <strong>in</strong> Länge und Richtung der Kanten s<strong>in</strong>d die Komponenten e<strong>in</strong>es<br />
e , der die Deformation angibt. E<strong>in</strong>e Verschiebung <strong>des</strong> Elements bleibt also<br />
Tensors [ ]<br />
unberücksichtigt.<br />
ij<br />
F<br />
F<br />
g<br />
3<br />
e<br />
33<br />
e<br />
11<br />
e<br />
22<br />
g<br />
2<br />
g<br />
3<br />
e<br />
23<br />
g<br />
1<br />
e<br />
32<br />
g<br />
2<br />
g<br />
1
32<br />
Abbildung 9 Oben l<strong>in</strong>ks: Deformation, Drehung und Verschiebung e<strong>in</strong>es Volumenelements bei<br />
der Dehnung. Darunter: Def<strong>in</strong>ition der Tensorkomponenten zur Beschreibung der Deformation.<br />
Der W<strong>in</strong>kel zwischen den Kanten <strong>in</strong> Richtung g<br />
2<br />
,g<br />
3<br />
ändert sich um e<br />
32<br />
+ e23.<br />
e<br />
∂ui<br />
ij<br />
= Komponenten <strong>des</strong> Deformationstensors [ e<br />
ij<br />
]<br />
∂x<br />
j<br />
u<br />
u<br />
i<br />
[ e ] ⋅ x<br />
= ij<br />
= e<br />
ij<br />
⋅ x<br />
j<br />
Auslenkung e<strong>in</strong>es Vektors bei homogener<br />
Dehnung<br />
Tabelle 39 Der Deformationstensor<br />
Bei Drehungen <strong>des</strong> Probevolumens wird der Deformationstensor antisymmetrisch:<br />
g<br />
3<br />
Auslenkung u<br />
Drehachse<br />
g<br />
2<br />
g<br />
1<br />
Radiusvektor x<br />
Abbildung 10 Auslenkung und Vektor stehen bei Drehung <strong>des</strong> Körpers senkrecht zue<strong>in</strong>ander<br />
e<br />
+ e<br />
+ e<br />
2<br />
11x1<br />
12<br />
13<br />
x x<br />
1<br />
x x<br />
1<br />
2<br />
3<br />
e<br />
u ⋅ x = 0<br />
u x = 0<br />
ij<br />
+ e<br />
i<br />
⋅<br />
i<br />
⋅ x<br />
21<br />
+ e<br />
+ e<br />
x<br />
22<br />
23<br />
i<br />
2<br />
x<br />
x<br />
⋅ x<br />
x<br />
2<br />
2<br />
2<br />
1<br />
x<br />
3<br />
j<br />
+ e<br />
= 0<br />
31<br />
+ e<br />
32<br />
+ e<br />
x<br />
33<br />
3<br />
x<br />
1<br />
⋅ x<br />
3<br />
⋅ x<br />
⋅ x<br />
2<br />
3<br />
2<br />
= 0<br />
Aus dem Vergleich der Koeffizienten von<br />
Die Auslenkung u steht bei Drehung <strong>des</strong><br />
Körpers senkrecht zum beliebigen Ortsvektor x<br />
Für die Auslenkung u Ortsvektor x und<br />
e e<strong>in</strong>gesetzt<br />
Deformationstensor [ ]<br />
ij<br />
x x folgt :<br />
i j
33<br />
e<br />
e = 0<br />
Für i = j<br />
ii<br />
= −<br />
Für j<br />
ij<br />
e ji<br />
i ≠ ([ ]<br />
e antisymmetrisch )<br />
Tabelle 40 Bei re<strong>in</strong>er Drehung ist der Deformationstensor antisymmetrisch<br />
ij<br />
Mit dem symmetrischen Teil <strong>des</strong> Deformationstensors wird der „Dehnungstensor“ als<br />
symmetrischer Tensor formuliert, so dass e<strong>in</strong>e Drehung <strong>des</strong> Volumenelements als ganzes nicht<br />
zum Ausdruck kommt.<br />
[ ε ]<br />
ij<br />
Der symmetrische Dehnungstensor<br />
ε = e<br />
Ausdehnung („Tensile Stra<strong>in</strong>“)<br />
ii<br />
ii<br />
ε<br />
ij<br />
= 2<br />
1<br />
[ ]<br />
ij<br />
( e + e )<br />
ij<br />
ji<br />
Die Änderung <strong>des</strong> W<strong>in</strong>kels zwischen Vektoren<br />
<strong>in</strong> Richtung g , g ist 2 ε (vgl. Abbildung 9)<br />
ϖ Der antisymmetrische Rotationstensor<br />
i<br />
j<br />
ij<br />
ϖ<br />
ij<br />
ϖ<br />
ii<br />
= 2<br />
1<br />
= 0<br />
( e − e )<br />
[ e ] [ ε ] + [ ϖ ]<br />
ij<br />
ij<br />
ji<br />
Der Drehw<strong>in</strong>kel <strong>des</strong> Elements ist<br />
= Die Summe aus dem Rotations- und dem<br />
ij ij<br />
Dehnungstensor ergibt den Deformationstensor.<br />
Tabelle 41 Symmetrischer Dehnungstensor, antisymmetrischen Rotationstensor und<br />
Deformationstensor<br />
Analog zum Spannungstensor gibt es für den Dehnungstensor drei ausgezeichnete Richtungen,<br />
die man durch Hauptachsentransformation erreicht (vgl. Tabelle 37). Die Richtung der<br />
Hauptachsen ist dadurch ausgezeichnet, dass sie bei Deformation senkrecht zue<strong>in</strong>ander bleiben.<br />
Die Auslenkung muss also immer <strong>in</strong> Richtung dieser ausgezeichneten Vektoren liegen:<br />
u = λ ⋅ .<br />
x Haupt<br />
2 ϖ<br />
ij<br />
F<br />
x<br />
Haupt<br />
u<br />
F
34<br />
Abbildung 11 E<strong>in</strong>e Hauptdehnungsachse. Die beiden anderen stehen senkrecht dazu.<br />
Die <strong>physikalischen</strong> Komponenten e<strong>in</strong>es Tensors<br />
Die Komponenten e<strong>in</strong>es Tensors beziehen sich auf die Basisvektoren, aus denen die tensoriellen<br />
Produkte gebildet wurden ( vgl. Tabelle 26 ). Bei e<strong>in</strong>em Kristall z. B. kann es s<strong>in</strong>nvoll se<strong>in</strong>, als<br />
Basisvektoren die Translationsvektoren e<strong>in</strong>er Elementarzelle zu wählen. Die Verschiebung um<br />
„e<strong>in</strong>s“ entspricht dann der Verschiebung um e<strong>in</strong>e Gitterkonstante, <strong>in</strong> metrischen E<strong>in</strong>heiten z. B.<br />
1,4 nm. Soll e<strong>in</strong> Tensor diese metrischen <strong>Eigenschaften</strong> wiedergeben, dann muss er <strong>in</strong><br />
„<strong>physikalischen</strong> Komponenten“ angeben werden. Zur Umrechnung ist der Metriktensor nützlich:<br />
Bei Division der Komponenten durch die Wurzeln der entsprechenden Metrik-Koeffizienten<br />
erhält man die <strong>physikalischen</strong> Komponenten.<br />
g<br />
2<br />
Abbildung 12 Die Verschiebung um e<strong>in</strong>e E<strong>in</strong>heit g<br />
2<br />
im schiefw<strong>in</strong>kligen Basissystem entspricht<br />
1,4 nm (die Würfelkanten zeigen die Länge 1 nm)<br />
Physikalische Komponenten<br />
t =<br />
ij ij<br />
* t g<br />
( ii)<br />
g<br />
( jj)<br />
i<br />
t * j = t<br />
i<br />
j<br />
g<br />
( ii)<br />
g<br />
( jj)<br />
j j ( ii)<br />
*<br />
i<br />
ti<br />
g g<br />
( jj)<br />
t =<br />
t * = t<br />
ij<br />
ij<br />
g<br />
( ii)<br />
g<br />
( jj)<br />
Umrechnung der Komponenten e<strong>in</strong>es Tensors<br />
auf se<strong>in</strong>e <strong>physikalischen</strong> Komponenten (mit<br />
Stern) durch Multiplikation mit den<br />
entsprechenden Metrik-Koeffizienten.<br />
Tabelle 42 Umrechnung der kontra- ko- und gemischt-varianten Komponenten e<strong>in</strong>es Tensors auf<br />
physikalische Komponenten.
35<br />
3.2 Tensoren höherer als zweiter Stufe<br />
Das <strong>in</strong> Tabelle 25 def<strong>in</strong>ierte tensorielle Produkt lässt sich um weitere Vektoren erweitern. Man<br />
def<strong>in</strong>iert <strong>des</strong>halb e<strong>in</strong>en Tensor N-ter Stufe als e<strong>in</strong>e unter Koord<strong>in</strong>atentransformationen <strong>in</strong>variante<br />
Größe. Wie beim Tensor 2. Stufe können die Basen aus ko- oder kontravarianten Vektoren oder<br />
aus e<strong>in</strong>er Mischung aus beiden bestehen.<br />
(N) ijk...<br />
l<br />
T = T g<br />
ig<br />
jg<br />
k<br />
....<br />
ijkl<br />
T =<br />
a<br />
i<br />
m<br />
a<br />
j<br />
n<br />
a<br />
k<br />
g =<br />
k<br />
p<br />
a<br />
l<br />
q<br />
k<br />
l<br />
T<br />
a g<br />
l<br />
g<br />
mnpq<br />
l<br />
E<strong>in</strong> Tensor N-ter Stufe ist e<strong>in</strong>e <strong>in</strong>variante<br />
Größe, deren Basis e<strong>in</strong> Produkt aus N<br />
Grundvektoren ist.<br />
Transformationsgesetz beim Wechsel <strong>des</strong><br />
Bezugssystems ( vgl. 3.1.1 für Tensoren 2.<br />
Stufe).<br />
Auch jetzt gilt: Jeder obere Index transformiert<br />
sich wie e<strong>in</strong> kontravarianter Vektor und jeder<br />
untere wie e<strong>in</strong> kovarianter<br />
Transformationsgesetz für die kontravarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
i<br />
j<br />
i<br />
g = a g<br />
j<br />
Transformationsgesetz der kovarianten<br />
Basisvektoren bei Übergang <strong>in</strong> das System B<br />
Tabelle 43 Transformation der Komponenten e<strong>in</strong>es Tensors höherer Stufe bei Wechsel <strong>des</strong><br />
Bezugsystems<br />
Man kann mit diesem Transformationsgesetz e<strong>in</strong>en Tensor def<strong>in</strong>ieren: E<strong>in</strong>e N-fach <strong>in</strong>dizierte<br />
Größe, die sich nach diesem Gesetz transformiert, bezeichnet man als Tensor N-ter Stufe.<br />
3.2.1 Rechenregeln für Tensoren<br />
Neben dem oben angewandten tensoriellen Produkt ist Addition von Tensoren gleicher Stufe und<br />
das verjüngende Produkt von Tensoren unterschiedlicher Stufe besonders wichtig.<br />
w<br />
ijk<br />
u + v = w<br />
g g g<br />
ijk<br />
= u g g g + v<br />
i<br />
j<br />
k<br />
i<br />
j<br />
k<br />
ijk ijk<br />
w = u +<br />
v<br />
ijk<br />
ijk<br />
g g<br />
i<br />
j<br />
g<br />
k<br />
Addition von Tensoren gleicher Stufe<br />
u + v = v + u = w<br />
Die Addition ist kommutativ<br />
Tabelle 44 Addition von Tensoren gleicher Stufe, am Beispiel von Tensoren 3. Stufe<br />
Das verjüngende Produkt entsteht durch skalare Multiplikation der dazugehörenden<br />
Grundvektoren.
36<br />
ijk<br />
lm<br />
ijk lm<br />
( u g<br />
ig<br />
jg<br />
k<br />
) ⋅ ( v g<br />
lg<br />
m<br />
) = u v g<br />
kl<br />
g<br />
ig<br />
jg<br />
m<br />
Verjüngen<strong>des</strong> Produkt: Skalare Multiplikation<br />
von zwei Grundvektoren<br />
ijk lm<br />
m<br />
= u vk<br />
g<br />
ig<br />
jg<br />
Die Metrik-Koeffizienten ziehen <strong>in</strong> v e<strong>in</strong>en<br />
m<br />
Index herunter<br />
ijm<br />
= w g g g<br />
Summation über k ausgeführt<br />
ijm<br />
w =<br />
i<br />
u<br />
j<br />
ijk<br />
v<br />
m<br />
m<br />
k<br />
Transformationsgesetz für die Indizes:<br />
„Überschiebung“<br />
Tabelle 45 Verjüngen<strong>des</strong> Produkt zweier Tensoren, am Beispiel e<strong>in</strong>es 3- und 2-stufigen Tensors<br />
Es gilt der Satz: Die Überschiebung e<strong>in</strong>es Tensors M-ter Stufe mit e<strong>in</strong>em Tensor N-ter Stufe<br />
ergibt e<strong>in</strong>en Tensor (M+N-2)-ter Stufe.<br />
3.2.2 Der Elastizitätstensor<br />
Die Dehnungen und die Spannungen <strong>in</strong> e<strong>in</strong>em Festkörper s<strong>in</strong>d über den Elastizitätstensor, e<strong>in</strong><br />
Tensor 4. Stufe, mite<strong>in</strong>ander verknüpft. Er entspricht dem Hookeschen Gesetz, das die<br />
Verformung (hier: Dehnung) als l<strong>in</strong>eare Funktion der Kraftwirkung (hier: Spannung) zeigt.<br />
ε =<br />
ij<br />
sijklσ<br />
kl<br />
t = S ⋅n<br />
u = D ⋅ x<br />
Tabelle 46 Def<strong>in</strong>ition <strong>des</strong> Elastizitätstensors<br />
Hookesches Gesetz bei Verformung e<strong>in</strong>es 3-<br />
dimensionalen Körpers.<br />
s Komponenten <strong>des</strong> Elastizitätstensors<br />
ijkl<br />
Der Spannungstensor S (Komponenten σ<br />
kl<br />
)<br />
zeigt den Spannungsvektor t an e<strong>in</strong>er Fläche<br />
mit Normale n bei äußerer Kraftwirkung auf<br />
den Körper<br />
Der Dehnungstensor D (Komponenten ε<br />
ij<br />
)<br />
zeigt die Änderung u e<strong>in</strong>es auf dem Körper<br />
angebrachten Vektors x bei Verformung <strong>des</strong><br />
Körpers<br />
Die Transformationseigenschaften bei Wechsel <strong>des</strong> Koord<strong>in</strong>atensytems zeigen, dass<br />
ijkl<br />
s<br />
Komponenten e<strong>in</strong>es Tensors s<strong>in</strong>d, entsprechend den Regeln im Abschnitt Transformation der<br />
Komponenten e<strong>in</strong>es Tensors 2. Stufe bei Wechsel <strong>des</strong> Bezugssystems.
37<br />
σ<br />
ε = a<br />
ij ik<br />
a<br />
jlε<br />
Transformation der Komponenten <strong>des</strong><br />
kl<br />
Dehnungstensors<br />
σ = a<br />
mn<br />
op<br />
=<br />
om<br />
a<br />
pn<br />
σ<br />
mn<br />
−1 −1<br />
( a ) mo ( a ) npσ<br />
op<br />
Transformation der Komponenten <strong>des</strong><br />
Spannungstensors und ihre<br />
Rücktransformation<br />
σ<br />
mn<br />
= aoma<br />
pnσ<br />
Gilt, weil die Inverse gleich der<br />
op<br />
Transponierten ist (orthonormale Basis)<br />
ε = s<br />
ij ijopσ<br />
Hookesches Gesetz im transformierten<br />
op<br />
System<br />
ε = aik<br />
a<br />
jlε<br />
= a<br />
kl ik<br />
a<br />
ij<br />
jl<br />
sklmnσ<br />
mn<br />
= aik<br />
a<br />
jl<br />
sklmnaoma<br />
pnσ<br />
Die Transformierte <strong>des</strong> Dehnungstensors<br />
op<br />
und <strong>des</strong> Spannungstensors e<strong>in</strong>gesetzt<br />
s<br />
ijop<br />
= aik<br />
a<br />
jl<br />
aoma<br />
pns<br />
Aus dem Koeffizientenvergleich für ε<br />
klmn<br />
ij<br />
und σ<br />
op<br />
im Hookeschen Gesetz folgt die<br />
s<br />
ijkl<br />
= aima<br />
jnakoalpsmnop<br />
Transformation der Komponenten <strong>des</strong><br />
Elastizitätstensors<br />
Tabelle 47 Transformation der Komponenten <strong>des</strong> Elastizitätstensors<br />
Weil sowohl der Spannungs-(Tabelle 32) als auch der Dehnungstensor (Tabelle 41) symmetrisch<br />
s<strong>in</strong>d, ändert die Permutation von i und j bzw. von k und l die Komponenten s<br />
ijkl<br />
nicht. Anstelle<br />
von 81 Komponenten gibt es also nur 36. Zu jeder der sechs Komb<strong>in</strong>ationen für ij gehören sechs<br />
Komb<strong>in</strong>ationen für kl.<br />
i 1 2 3<br />
j 1 1 2 1 2 3<br />
Tabelle 48 Die sechs Index Komb<strong>in</strong>ationen ij , die zu unterschiedlichen Elementen <strong>des</strong><br />
Dehnungstensors führen (Analoges gilt für kl <strong>des</strong> Spannungstensors)<br />
Diese 36 Elemente kann man schließlich <strong>in</strong> „Matrix Schreibweise“ anordnen. Konventionen dazu<br />
<strong>in</strong> Nye, S.134.<br />
Zeigt der Körper <strong>Symmetrie</strong>, dann reduziert sich die Anzahl der unabhängigen Komponenten<br />
noch weiter, weil dieser Tensor – im Gegensatz zum Spannungs- oder Dehnungstensor - e<strong>in</strong>e<br />
<strong>in</strong>nere Eigenschaft <strong>des</strong> Körpers zeigt, die gegenüber den <strong>Symmetrie</strong>transformationen <strong>des</strong> Körpers<br />
<strong>in</strong>variant ist (von Neumannsches Pr<strong>in</strong>zip 4.1.2).<br />
s = a<br />
ijkl<br />
im<br />
a<br />
jn<br />
a<br />
a<br />
im<br />
ko<br />
a<br />
lp<br />
s<br />
mnop<br />
Gleichung für die Komponenten <strong>des</strong><br />
Elastizitätstensors bei e<strong>in</strong>er <strong>Symmetrie</strong><br />
Transformation<br />
Element der Matrix e<strong>in</strong>er <strong>Symmetrie</strong>-<br />
Transformation <strong>des</strong> Körpers<br />
Tabelle 49 Bed<strong>in</strong>gung für die Komponenten <strong>des</strong> Elastizitätstensors bei e<strong>in</strong>er <strong>Symmetrie</strong>operation
38<br />
4 Analyse physikalischer <strong>Eigenschaften</strong> mit Hilfe der Gruppentheorie<br />
<strong>Symmetrie</strong>n <strong>in</strong> der Anordnung der Komponenten e<strong>in</strong>es realen Körpers wirken auf se<strong>in</strong>e<br />
<strong>physikalischen</strong> <strong>Eigenschaften</strong>. Die Gesamtheit der <strong>Symmetrie</strong>operationen e<strong>in</strong>es Körpers s<strong>in</strong>d e<strong>in</strong>e<br />
Realisierung e<strong>in</strong>er abstrakten Gruppe, sie wird hier <strong>Symmetrie</strong>gruppe genannt. Betrachtet man<br />
nur die Drehungen und Spiegelungen, dann ist die Gruppe endlich. Wirken auch die<br />
Translationen <strong>des</strong> idealen, unendlichen Gitters auf die <strong>physikalischen</strong> <strong>Eigenschaften</strong>, etwa auf die<br />
Phase der Auslenkung e<strong>in</strong>es Teilchens, das durch e<strong>in</strong>e harmonische Welle angeregt sei, dann<br />
muss die unendliche Raumgruppe betrachtet werden.<br />
E<strong>in</strong>e <strong>Symmetrie</strong>operation ist zunächst unmittelbar im Ortsraum def<strong>in</strong>iert, <strong>in</strong>dem sie die<br />
Ortsvektoren spiegelt, dreht oder verschiebt. Denkt man sich den Ortsvektor festgehalten, dann<br />
entspricht e<strong>in</strong>e <strong>Symmetrie</strong>operation dem Übergang <strong>in</strong> e<strong>in</strong> transformiertes Koord<strong>in</strong>atensystem.<br />
Die Auswirkung e<strong>in</strong>er <strong>Symmetrie</strong>operation auf e<strong>in</strong>e von den Ortskoord<strong>in</strong>aten abhängige<br />
physikalische Eigenschaft richtet sich <strong>des</strong>halb nach ihrer Transformationsvorschrift bei Wechsel<br />
<strong>des</strong> Koord<strong>in</strong>atensystems. E<strong>in</strong> Tensor 2. Stufe, z. B., transformiert sich auf andere Weise wie e<strong>in</strong><br />
Tensor 4. Stufe.<br />
Viele physikalische <strong>Eigenschaften</strong>, z. B. Tensoren, atomare Auslenkungsfelder, bestimmte<br />
Funktionen e<strong>in</strong>er reellen oder komplexen Veränderlichen, zeigen die Eigenschaft von Elementen<br />
e<strong>in</strong>es Vektorraums. Dessen Dimension richtet sich nach der Eigenschaft, sie ist z. B. 9 bei<br />
Tensoren 2. Stufe, 81 bei Tensoren 4. Stufe.<br />
Ist die physikalische Eigenschaft e<strong>in</strong> Element e<strong>in</strong>es Vektorraums, dann kann die Wirkung der<br />
<strong>Symmetrie</strong>operationen mit den Methoden der Darstellungstheorie formuliert werden. Man ordnet<br />
jeder <strong>Symmetrie</strong>operation im Ortsraum e<strong>in</strong>e Transformation im Vektorraum zu, die e<strong>in</strong>en<br />
Eigenschafts-Vektor auf e<strong>in</strong>en anderen abbildet. Diese Abbildung stellt man sich durch e<strong>in</strong>en –<br />
für die Eigenschaft spezifischen - „Operator“ bewirkt vor. Die zu allen <strong>Symmetrie</strong>operationen<br />
gehörenden Transformationsmatrizen <strong>des</strong> Vektorraums bilden auch e<strong>in</strong>e Gruppe, die, im<br />
mathematischen S<strong>in</strong>n, e<strong>in</strong>e Darstellung der <strong>Symmetrie</strong>gruppe ist.<br />
Zu jedem n-dimensionalen Vektorraum gehört e<strong>in</strong> Satz von n Basisvektoren. Bezüglich der<br />
<strong>Symmetrie</strong> bevorzugt ist e<strong>in</strong>e Basis, wenn möglichst viele ihrer Vektoren bei Anwendung der<br />
<strong>Symmetrie</strong>operationen entweder unverändert bleiben oder nur mit e<strong>in</strong>em Faktor multipliziert<br />
werden. Mit anderen Worten: Wenn durch Anwendung der <strong>Symmetrie</strong>operationen möglichst<br />
wenig Basisvektoren durchmischt werden.<br />
Ist die <strong>in</strong> diesem S<strong>in</strong>n optimierte Basis gefunden, dann bilden die Matrizen, mit denen sich die<br />
e<strong>in</strong>zelnen Basisvektoren bei Anwendung e<strong>in</strong>er <strong>Symmetrie</strong>operation transformieren, e<strong>in</strong>e<br />
irreduzible Darstellung der <strong>Symmetrie</strong>gruppe.<br />
Stellt e<strong>in</strong>e Tabelle oder Abbildungen unterschiedliche Räume dar, dann gilt folgender Farbcode:<br />
Blau, was den Ortsraum betrifft, gelb, den Vektorraum der <strong>physikalischen</strong> Objekte betreffen<strong>des</strong>,<br />
grün, was zu se<strong>in</strong>en Basen nach irreduziblen Darstellungen gehört.
39<br />
4.1 Begriffe zur Darstellungstheorie<br />
4.1.1 <strong>Symmetrie</strong> angepasste Basisvektoren<br />
Unter der Transformation durch e<strong>in</strong>e Martix T wird e<strong>in</strong> Vektor gedreht und, im allgeme<strong>in</strong>en,<br />
auch <strong>in</strong> der Länge verändert. Zu jeder Transformation T gibt es aber spezielle Vektoren v , die<br />
i<br />
nur ihre Länge bzw. ihr Vorzeichen ändern. Legt man die Basisvektoren e<strong>in</strong>es<br />
Koord<strong>in</strong>atensystems <strong>in</strong> diese ausgezeichneten Richtungen, dann erhält man e<strong>in</strong> dieser<br />
Transformation angepasstes Koord<strong>in</strong>atensystem.<br />
Wenn die Transformationen, d. h. die Matrizen T <strong>in</strong> R 3 , e<strong>in</strong>e Gruppe bilden, wenn sie z. B. zu<br />
<strong>Symmetrie</strong>elementen gehören, dann können mit Hilfe der Darstellungstheorie die der <strong>Symmetrie</strong><br />
angepassten Richtungen e<strong>in</strong>es Vektorraums ermittelt werden.<br />
T ⋅ v i<br />
= λ ⋅ v<br />
i<br />
i<br />
Im allgeme<strong>in</strong>en f<strong>in</strong>det man λ und<br />
i v durch Lösung <strong>des</strong><br />
i<br />
durch diese Forderung formulierten Gleichungssystems<br />
( vgl. 3.1.4 )<br />
T⋅e i<br />
= λ ⋅e<br />
i<br />
i<br />
Bezüglich T <strong>Symmetrie</strong> angepasste Basisvektoren<br />
(orange im Bild)<br />
Die Abbildung T beschreibe e<strong>in</strong>e Spiegelung:<br />
Abbildung T ,<br />
Spiegelung an der<br />
Ebene<br />
Beliebige, der<br />
<strong>Symmetrie</strong> nicht<br />
angepasste Basis<br />
x<br />
x′<br />
= T ⋅ x<br />
<strong>Symmetrie</strong>angepasste<br />
Basis<br />
Tabelle 50 E<strong>in</strong>er Spiegelebene angepasste Basisvektoren (orange) und e<strong>in</strong> beliebiges<br />
Koord<strong>in</strong>atensystem (grün)
40<br />
4.1.2 Operatoren, von Neumannsches Pr<strong>in</strong>zip<br />
E<strong>in</strong>e Koord<strong>in</strong>atentransformation T im Ortsraum wirkt auf alle Koeffizienten, die auf<br />
Ortskoord<strong>in</strong>aten bezogene physikalische <strong>Eigenschaften</strong> beschreiben. Die mathematische<br />
Formulierung der Wirkung hängt von der Anwendung ab. Man verb<strong>in</strong>det e<strong>in</strong>e Abbildung im<br />
Ortsraum <strong>des</strong>halb mit e<strong>in</strong>em Operator, der die zur Anwendung passende Abbildung im<br />
Vektorraum der Objekte (Vektoren <strong>des</strong> Ortsraums, atomare Auslenkungen, Tensoren,<br />
Funktionen) bewirkt.<br />
Für die <strong>physikalischen</strong> <strong>Eigenschaften</strong> e<strong>in</strong>es Kristalls gilt das „Von Neumannsche Pr<strong>in</strong>zip“:<br />
„Die <strong>Symmetrie</strong>elemente jeder <strong>physikalischen</strong> Eigenschaft enthalten die <strong>Symmetrie</strong>elemente der<br />
Punktgruppe <strong>des</strong> Kristalls“<br />
4.1.2.1 Operator im Vektorraum der Atomlagen<br />
Die Transformation der Ortsvektoren erfolgt unmittelbar mit den 3× 3 Drehmatrizen der<br />
<strong>Symmetrie</strong>operationen.<br />
Dimension <strong>des</strong> Vektorraums: 3<br />
Der Operator ist die Drehmatrix T<br />
x′<br />
= T⋅<br />
x<br />
Abbildung T<br />
x′<br />
x<br />
⎡1<br />
T =<br />
⎢<br />
⎢<br />
0<br />
⎢⎣<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
Tabelle 51 Operator zur Abbildung im 3-dimensionalen Ortsraum<br />
Von besonderem Interesse zur Analyse struktureller Phasenumwandlungen s<strong>in</strong>d die atomaren<br />
Auslenkungen und die thermische Ausdehnung, die durch den Dehnungstensor gegeben wird.
41<br />
4.1.2.2 Operator im Vektorraum „Atomare Auslenkung“:<br />
Die Dimension dieses Vektorraums ist das Produkt aus der Anzahl der Freiheitsgrade pro<br />
Teilchen und der Teilchenzahl. Die Anwendung e<strong>in</strong>er <strong>Symmetrie</strong>operation im Ortsraum bewirkt<br />
im Vektorraum der Auslenkungen im allgeme<strong>in</strong>en e<strong>in</strong>e Vertauschung der Teilchen und e<strong>in</strong>e<br />
Drehung <strong>des</strong> Auslenkungsvektors. Bei<strong>des</strong> kann man als Wirkung <strong>des</strong> dem Gruppenelement<br />
zugeordneten Operators O<br />
T betrachten. Die durch den Operator symbolisierte<br />
Transformationsvorschrift zeigt das Verhalten e<strong>in</strong>es beliebigen Auslenkungsmusters aller<br />
Teilchen, das die <strong>Symmetrie</strong> der Teilchen <strong>in</strong> der Ruhelage nicht berücksichtigt. Es ist <strong>des</strong>halb e<strong>in</strong><br />
realistisches Bild e<strong>in</strong>er Momentaufnahme der durch ihre Temperaturbewegung ausgelenkten<br />
Teilchen:<br />
Zweizählige<br />
Drehachse<br />
u<br />
1<br />
1<br />
u<br />
2<br />
2<br />
Abbildung 13 Auslenkungen u<br />
1<br />
, u<br />
2<br />
für zwei durch e<strong>in</strong>e zweizählige Achse verknüpften Teilchen<br />
Nr. 1, 2<br />
Bei e<strong>in</strong>er <strong>Symmetrie</strong>operation, z. B. der Anwendung der zweizähligen Achse, bildet der Operator<br />
O die Vektoren der Auslenkung wie folgt ab:<br />
T<br />
′<br />
u<br />
1<br />
1 2<br />
′<br />
u<br />
2<br />
Abbildung 14 Auslenkungen<br />
′<br />
, u ′<br />
u nach der Drehung um die zweizählige Achse<br />
1<br />
2
42<br />
Die Wirkung <strong>des</strong> Operators<br />
O<br />
T ist im E<strong>in</strong>zelnen:<br />
⎡x⎤<br />
⎡1 0 0⎤<br />
⎡x⎤<br />
Drehung:<br />
⎢ ⎥ ⎢ ⎥<br />
⋅<br />
⎢ ⎥<br />
⎢<br />
y<br />
⎥<br />
= ⎢0<br />
1 0⎥<br />
⎢<br />
y<br />
⎥<br />
⎢⎣<br />
z⎥⎦<br />
⎢ ⎥<br />
⎣0<br />
0 1⎦<br />
⎢⎣<br />
z⎥⎦<br />
Drehmatrix aus<br />
Auslenkungsvektors u<br />
3<br />
R zur 2-zähligen Drehung <strong>des</strong><br />
⎡ ⎤ ⎡0<br />
⎢ ⎥ = ⎢<br />
⎣1⎦<br />
⎣1<br />
2 Permutation:<br />
Teilchen Nr. κ = 1 wird auf κ ′ = 2 abgebildet.<br />
1⎤<br />
⎡1⎤<br />
⋅<br />
0<br />
⎥ ⎢ ⎥<br />
⎦ ⎣2⎦<br />
−1<br />
{ g | ν ( g)<br />
} r(<br />
κ ) − r(<br />
κ ′)<br />
Translation <strong>des</strong> Teilchens:<br />
{ g | ν ( g)<br />
}<br />
Element der Raumgruppe: Punktgruppenelement g mit<br />
Translationsanteil ν (g)<br />
(Seitz Notation)<br />
r (κ ) , r (κ ′)<br />
Ortsvektoren der Teilchen Nr. κ , κ ′<br />
Tabelle 52 Transformationsvorschrift für die Auslenkungen von Teilchen bei e<strong>in</strong>er<br />
<strong>Symmetrie</strong>operation<br />
Bei e<strong>in</strong>igen <strong>Symmetrie</strong> Elementen <strong>in</strong> nicht symmorphen Raumgruppen ist ν (g)<br />
ungleich null:<br />
−1<br />
{ g | ν ( g)<br />
} r(<br />
κ )<br />
Gleitspiegele<br />
bene<br />
1<br />
2<br />
r(κ )<br />
2<br />
ν (g)<br />
1<br />
2<br />
r (κ ′)<br />
2<br />
Gitterkonstan<br />
te a<br />
−1<br />
{ g | ν ( g)<br />
} r(<br />
κ ) − r(<br />
κ ′)<br />
Gitterkonstante b<br />
Abbildung 15 Translationsanteil bei Transformation <strong>des</strong> Teilchens κ = 1 zu Teilchen κ = 2<br />
durch e<strong>in</strong>e Gleitspiegelebene mit Gleitrichtung a .
43<br />
E<strong>in</strong> Translationsanteil, der sich auf die Phase der Auslenkung auswirkt, entsteht auch bei e<strong>in</strong>er<br />
Operationen der Punktgruppe, also ν (g) = 0 , wenn durch sie die Zelle verlassen wurde<br />
r(κ )<br />
1<br />
{ g | 0} −<br />
r(<br />
κ )<br />
r(κ ′)<br />
1<br />
2<br />
1 2<br />
−1<br />
{ g | ν ( g)<br />
} r(<br />
κ ) − r(<br />
κ ′)<br />
Abbildung 16 Zweizählige Drehung, bei der das Teilchen 1 <strong>in</strong> das Teilchen 2 der Nachbarzelle<br />
transformiert wird<br />
Die Translation bei der <strong>Symmetrie</strong>operation trägt, <strong>in</strong> Verb<strong>in</strong>dung mit Raumgruppen, zur Phase ϕ<br />
der Auslenkungen bei:<br />
ϕ =<br />
−1<br />
({ | ν ( g)<br />
} r(<br />
κ ) − r(<br />
κ ′)) ⋅ k<br />
g Phase der Auslenkung<br />
k<br />
Wellenvektor der Welle der Auslenkung<br />
−1<br />
{ | ν ( g)<br />
} r(<br />
κ ) − r(<br />
κ ′)<br />
g Translationsanteil <strong>des</strong> Teilchens κ (s.u.)<br />
u<br />
i kr( κ )<br />
( κ ) = u ⋅ e<br />
0<br />
( + ϕ )<br />
Auslenkung <strong>des</strong> Teilchens κ unter e<strong>in</strong>er<br />
ebenen Welle mit Wellenvektor k mit Phase ϕ<br />
Tabelle 53 Phase und Auslenkung e<strong>in</strong>es Teilchens nach e<strong>in</strong>er Transformation { g | ν ( g)<br />
}<br />
e<strong>in</strong> Translationsanteil entsteht.<br />
, bei der
44<br />
Die vollständige Matrix im 3p dimensionalen Raum (p Anzahl der permutierten Teilchen) besteht<br />
aus der Komb<strong>in</strong>ation der Permutations- mit der Rotationsmatrix: sie repräsentiert den Operator<br />
O<br />
T zur Transformation T im Ortsraum. Für jede „1“ <strong>in</strong> der Permutationsmatrix wird die 3× 3<br />
Drehmatrix e<strong>in</strong>gesetzt, die Stellen mit „0“ werden durch e<strong>in</strong>e 3× 3 Null-Matrix ersetzt.<br />
Für je<strong>des</strong> <strong>Symmetrie</strong> Element entsteht e<strong>in</strong>e Matrix dieser Art, die Gesamtheit dieser Matrizen für<br />
alle Gruppenelemente bilden bezüglich der Multiplikation e<strong>in</strong>e Gruppe, die der reduziblen<br />
Darstellung der <strong>Symmetrie</strong>gruppe.<br />
Matrix der <strong>Symmetrie</strong><br />
Operation, Dimension 3<br />
3<br />
R<br />
⎡1<br />
⎢<br />
⎢<br />
0<br />
⎢⎣<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥⎦<br />
Permutations-Matrix,<br />
Dimension p<br />
p<br />
R<br />
⎡0<br />
⎢<br />
⎣1<br />
1⎤<br />
0<br />
⎥<br />
⎦<br />
3p dim. Matrix der<br />
reduziblen Darstellung<br />
3p<br />
R<br />
⎡0<br />
⎢<br />
⎢<br />
0<br />
⎢0<br />
⎢1<br />
⎢<br />
⎢0<br />
⎢<br />
⎣0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
0⎥<br />
⎥<br />
0⎥<br />
0<br />
⎥<br />
⎦<br />
Abbildung 17 Beispiel für die Entstehung der Transformationsmatrix für die Auslenkungen<br />
(Matrix der reduziblen Darstellung) bei zwei Teilchen unter der Wirkung e<strong>in</strong>er zweizähligen<br />
Drehachse<br />
Bei der Transformation e<strong>in</strong>es speziellen atomaren Auslenkungsfelds unter e<strong>in</strong>er vierzähligen<br />
Achse, die <strong>in</strong> Richtung c verlaufe, erkennt man, dass die Gruppe der Transformationsmatrizen für<br />
die Auslenkungen e<strong>in</strong>e Untergruppe der <strong>Symmetrie</strong>gruppe ist (vgl. Homomorphe Abbildung,<br />
4.2):
45<br />
G e 4<br />
z<br />
2<br />
z<br />
3<br />
4 z<br />
x′ = T(g<br />
) ⋅ x<br />
3<br />
R<br />
x<br />
T<br />
⎡1<br />
⎢<br />
0<br />
⎢<br />
⎢⎣<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢<br />
⎣0<br />
1<br />
0<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
⎦<br />
⎡1<br />
⎢<br />
⎢<br />
0<br />
⎢<br />
⎣0<br />
0<br />
1<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
⎦<br />
⎡0<br />
⎢<br />
1<br />
⎢<br />
⎢⎣<br />
0<br />
1<br />
0<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
x′<br />
e<br />
D<br />
12<br />
R<br />
e′<br />
e′ = D(g<br />
) ⋅ e<br />
G D<br />
e 2 e<br />
z<br />
2<br />
z<br />
Tabelle 54 Beispiel für e<strong>in</strong>e homomorphe Abbildung der <strong>Symmetrie</strong>gruppe <strong>in</strong><br />
12<br />
der reduziblen Darstellung <strong>in</strong> R .<br />
3<br />
R auf die Gruppe
46<br />
4.1.2.3 Operator im Vektorraum <strong>des</strong> Dehnungstensors (thermische Ausdehnung)<br />
Der Dehnungstensor (vgl. 3.1.5) formuliert die Antwort e<strong>in</strong>es <strong>Festkörpers</strong> auf e<strong>in</strong>e von außen<br />
wirkende Kraft, er muss <strong>des</strong>halb nicht der <strong>Symmetrie</strong> <strong>des</strong> freien Kristalls genügen. Ändert sich<br />
die Form aber als Folge e<strong>in</strong>er Temperaturänderung, dann ersche<strong>in</strong>t die Dehnung als <strong>in</strong>nere<br />
Eigenschaft <strong>des</strong> sonst freien Körpers, die der <strong>Symmetrie</strong> <strong>des</strong> Körpers genügt:<br />
ε = α ⋅∆T<br />
ij<br />
ij<br />
ε = a<br />
ij<br />
α<br />
ij<br />
ik<br />
a<br />
jl<br />
ε<br />
kl<br />
Bei der thermischen Ausdehnung s<strong>in</strong>d die Komponenten<br />
<strong>des</strong> Dehnungstensors zur Temperaturänderung<br />
proportional<br />
Koeffizienten der thermischen Ausdehnung<br />
Gleichung für die Komponenten <strong>des</strong> Tensors zur<br />
thermischen Ausdehnung bei e<strong>in</strong>er <strong>Symmetrie</strong><br />
Transformation<br />
(vgl. Tabelle 29)<br />
Tabelle 55 Komponenten <strong>des</strong> Tensors und Koeffizienten der thermischen Ausdehnung<br />
Für das Folgende wird der Dehnungstensor als Vektor e<strong>in</strong>es sechs-dimensionalen Raumes<br />
aufgefasst:<br />
[ ]<br />
ε ij<br />
⎡ε<br />
=<br />
⎢<br />
⎢<br />
ε<br />
⎢⎣<br />
ε<br />
11<br />
12<br />
13<br />
ε<br />
ε<br />
ε<br />
12<br />
22<br />
23<br />
ε13<br />
⎤<br />
ε<br />
⎥<br />
23 ⎥<br />
ε ⎥<br />
33 ⎦<br />
∆β = ε<br />
2<br />
13<br />
⎡ε<br />
11 ⎤<br />
⎢ ⎥<br />
⎢<br />
ε<br />
22<br />
⎥<br />
⎢ε<br />
⎥<br />
33<br />
e = ⎢ ⎥<br />
⎢ε<br />
23 ⎥<br />
⎢ε<br />
⎥<br />
13<br />
⎢ ⎥<br />
⎢⎣<br />
ε<br />
12 ⎥⎦<br />
∆a<br />
a<br />
= ε 11<br />
Tabelle 56 Vektorielle Schreibweise <strong>des</strong> Dehnungstensors, geometrische Deutung der<br />
Komponenten
47<br />
Bei Anwendung e<strong>in</strong>er <strong>Symmetrie</strong>operation mit Matrix T transformieren sich die Komponenten<br />
<strong>des</strong> Dehnungstensors nach Tabelle 55. Im sechsdimensionalen Raum entspricht die<br />
<strong>Symmetrie</strong>operation der Transformation mit der Matrix D:<br />
G e 4<br />
z<br />
2<br />
z<br />
3<br />
4 z<br />
x′ = T(g<br />
) ⋅ x<br />
3<br />
R<br />
x<br />
T<br />
⎡1<br />
⎢<br />
0<br />
⎢<br />
⎢⎣<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢<br />
⎣0<br />
1<br />
0<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
⎦<br />
⎡1<br />
⎢<br />
⎢<br />
0<br />
⎢<br />
⎣0<br />
0<br />
1<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
⎦<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢<br />
⎣0<br />
1<br />
0<br />
0<br />
0⎤<br />
⎥<br />
0<br />
⎥<br />
1⎥<br />
⎦<br />
x′<br />
6<br />
R<br />
e<br />
D<br />
e′<br />
⎡1<br />
⎢<br />
⎢<br />
0<br />
⎢0<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
0⎥<br />
⎥<br />
0⎥<br />
0⎥<br />
⎥<br />
1<br />
⎦<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢0<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
0⎥<br />
⎥<br />
0⎥<br />
0⎥<br />
⎥<br />
1<br />
⎦<br />
⎡1<br />
⎢<br />
⎢<br />
0<br />
⎢0<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
0⎥<br />
⎥<br />
0⎥<br />
0⎥<br />
⎥<br />
1<br />
⎦<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢0<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
0⎥<br />
⎥<br />
0⎥<br />
0⎥<br />
⎥<br />
1<br />
⎦<br />
e′ = D(g<br />
) ⋅ e<br />
G D<br />
e 4<br />
z<br />
2<br />
z<br />
3<br />
4 z<br />
Tabelle 57 Transformation <strong>des</strong> Dehnungstensors unter e<strong>in</strong>er 4-zähligen Achse <strong>in</strong> Richtung c
48<br />
4.2 Homomorphe Abbildung<br />
E<strong>in</strong>e Abbildung e<strong>in</strong>er Gruppe G auf e<strong>in</strong>e Gruppe G D mit der Multiplikationsregel<br />
mit<br />
a'<br />
, b'<br />
∈ G'<br />
a'<br />
⋅b'<br />
= ( a ⋅ b)'<br />
a , b ∈ G<br />
heißt homomorph, wenn - im Gegensatz zur isomorphen Abbildung - unterschiedliche<br />
Elemente aus G auf das gleiche Element <strong>in</strong> G D abgebildet werden.<br />
Beispiel:<br />
G = { e 4 1 2 4 3 }<br />
G D = { e 2 }<br />
In Worten: „Das Produkt der Bilder ist das Bild <strong>des</strong> Produkts“. Diese Abbildung ist, im<br />
Unterschied zur isomorphen Abbildung, nicht umkehrbar e<strong>in</strong>deutig.<br />
Produkt der Bilder<br />
Bild <strong>des</strong> Produkts<br />
a'<br />
⋅ b'<br />
=<br />
( a ⋅ b)'
49<br />
Wenn e<strong>in</strong>e Gruppe G homomorph auf die Operatorgruppe G D abbildbar ist, dann ist G D e<strong>in</strong>e<br />
Darstellung der Gruppe G im Darstellungsraum L. Ist L von der Dimension n, dann ist die<br />
Darstellung auch von der Dimension n oder „vom Grad n“<br />
Von der Def<strong>in</strong>ition zur Rechenvorschrift:<br />
1. Am Anfang steht die abstrakte Gruppe G, hier als <strong>Symmetrie</strong>gruppe realisiert.<br />
2. Das physikalische Problem wird mit e<strong>in</strong>em Zustandsvektor e aus e<strong>in</strong>em mehrdimensionalen<br />
Vektorraum R n beschrieben.<br />
3. Die Transformation der Ortskoord<strong>in</strong>aten <strong>in</strong> R 3 unter der Wirkung der g ∈G<br />
ändert den<br />
Zustandsvektor e, abhängig vom <strong>physikalischen</strong> Problem. E<strong>in</strong> Operator, realisiert durch e<strong>in</strong>e<br />
Matrix D (g)<br />
, beschreibt die Transformation von e.<br />
4. Die zu g ∈G<br />
gehörenden Operatoren bilden selbst e<strong>in</strong>e Gruppe: Die Gruppe der Darstellung<br />
G D .<br />
5. <strong>Symmetrie</strong> angepasst ist die Basis, wenn unter der Wirkung von g ∈G<br />
möglichst viele<br />
Basisvektoren e <strong>in</strong>variant bleiben. In diesem Fall s<strong>in</strong>d die Transformationsmatrizen von<br />
m<strong>in</strong>imaler Dimension: Ihre Gruppe G D ist e<strong>in</strong>e irreduzible Darstellung der Gruppe G.
50<br />
4.3 Aufbau der reduziblen Darstellung:<br />
Zum Aufbau der reduziblen Darstellung benötigt man die <strong>Symmetrie</strong>gruppe G, die auf die<br />
3<br />
Ortsvektoren im R wirkt, und e<strong>in</strong> Objekte der <strong>physikalischen</strong> Eigenschaft, das als Vektor e<strong>in</strong>es<br />
N<br />
Vektorraums R verstanden wird. Die Dimension N richtet sich nach dem Objekt. Bei Tensoren<br />
oder atomaren Auslenkungsfeldern ist die Dimension unmittelbar gegeben.<br />
Ist das Objekt aber e<strong>in</strong>e Funktion und ist die Dimension N nicht unmittelbar ersichtlich, dann<br />
transformiert man e<strong>in</strong>e Ausgangsfunktion zu jedem g ∈ G . Aus den so erzeugten Funktionen<br />
wählt man die l<strong>in</strong>ear unabhängigen, ihre Anzahl zeigt die Dimension N. Jede dieser Funktionen<br />
N<br />
wird als e<strong>in</strong>e Komponente e<strong>in</strong>es Vektors <strong>in</strong> R geschrieben.<br />
Ordnungspr<strong>in</strong>zip:<br />
<strong>Symmetrie</strong>-Gruppe G<br />
Transformation <strong>in</strong> R 3 :<br />
x′ = T(g<br />
) ⋅ x<br />
Aufbau <strong>des</strong> Vektorraums,<br />
spezifisch für die Anwendung:<br />
( Transformation <strong>in</strong> R N )<br />
e′ = D ) ⋅ e<br />
(g ∀g ∈ G<br />
Anwendung:<br />
Atomare Auslenkung<br />
Dehnungstensor<br />
Atomare Auslenkung<br />
Dehnungstensor<br />
∆β<br />
= e<br />
2<br />
∆ a =<br />
a<br />
e 11<br />
13<br />
Permutations- und Drehmatrix<br />
für den 3 p dimensionalen Raum<br />
der Auslenkungsvektoren (p<br />
Teilchenzahl)<br />
Tabelle 58 Schema zum Aufbau der reduziblen Darstellung<br />
Transformationsmatrix für den<br />
6-dim. Vektor aus<br />
Tensorkomponenten<br />
Zu jedem Element g ∈ G wird nun die Transformationsmatrix D (g)<br />
für e<strong>in</strong>en beliebigen Vektor<br />
N<br />
aus R bestimmt. Die Gesamtheit der Transformationen bildet die Gruppe e<strong>in</strong>er reduziblen<br />
Darstellung der <strong>Symmetrie</strong>gruppe G.
51<br />
4.4 Zerlegung nach irreduziblen Darstellungen<br />
D( g1 ⋅ g<br />
2<br />
) = D(<br />
g1)<br />
⋅ D(<br />
g<br />
2<br />
)<br />
Die Matrizen D (g)<br />
s<strong>in</strong>d (im Allgeme<strong>in</strong>en<br />
reduzible) Darstellungen der Gruppe G:<br />
Der Aufbau der reduziblen Darstellung repräsentiert die Physik <strong>des</strong> Systems. Die Zerlegung nach<br />
irreduziblen Darstellungen erfolgt nach e<strong>in</strong>em für alle Anwendungen identischen Formalismus:<br />
m j<br />
1 *<br />
j<br />
= ∑ χ(g)<br />
⋅χ<br />
(g) Vielfachheit m j<br />
e<strong>in</strong>er irreduziblen Darstellung j<br />
G<br />
g∈G<br />
χ (g)<br />
j<br />
χ (g)<br />
G<br />
Charakter der Matrix D (g)<br />
der reduziblen<br />
Darstellung<br />
Charakter der Matrix D j (g)<br />
der irreduziblen<br />
Darstellung j. Der Stern ( * ) steht für „konjugiert<br />
komplex“.<br />
Ordnung der Gruppe G<br />
Tabelle 59 Berechnung der Vielfachheit e<strong>in</strong>er irreduziblen Darstellung (Die Summation erfolgt<br />
über alle Gruppenelemente) aus den Charakteren der reduziblen Darstellung<br />
j<br />
d j<br />
*<br />
Projektionsoperatoren P<br />
j<br />
rs enthalten die<br />
P rs = ∑ D rs (g) ⋅D(g)<br />
Basisvektoren zu allen irreduziblen Darstellungen<br />
G g∈<br />
G j.<br />
j<br />
j<br />
D rs (g)<br />
Matrixelement rs zum Gruppenelement g der<br />
irreduziblen Darstellung j .<br />
d<br />
j<br />
Dimension der irreduziblen Darstellung j<br />
Tabelle 60 Berechnung <strong>des</strong> Projektionsoperators zu e<strong>in</strong>em Matrixelement e<strong>in</strong>er irreduziblen<br />
Darstellung aus den Matrizen der reduziblen Darstellung
52<br />
Die Basisvektoren zu den irreduziblen Darstellungen folgen aus dem Produkt <strong>des</strong><br />
Projektionsoperators mit e<strong>in</strong>em allgeme<strong>in</strong>en Vektor <strong>des</strong> Darstellungsraums. Diese Basisvektoren<br />
transformieren sich bei Anwendung e<strong>in</strong>er <strong>Symmetrie</strong>transformation nach der im<br />
Projektionsoperator verwendeten irreduziblen Darstellung.<br />
j<br />
j<br />
er<br />
= ∑D<br />
rs (g) ⋅<br />
s<br />
e<br />
j<br />
s<br />
Transformation e<strong>in</strong>es Basisvektors bei der<br />
<strong>Symmetrie</strong>operation g<br />
j<br />
Nummer der Darstellung<br />
r, s<br />
Nummer der Basisvektoren zur Darstellung j<br />
Matrixelement r, s zur irreduziblen Darstellung<br />
j zum Gruppenelement g<br />
j<br />
D rs (g)<br />
Tabelle 61 Transformation e<strong>in</strong>es Basisvektors zu e<strong>in</strong>er irreduziblen Darstellung<br />
Bei e<strong>in</strong>dimensionalen Darstellungen wird der Vektor wird bei der Transformation lediglich mit<br />
dem Matrixelement multipliziert, bei zwei- und dreidimensionalen Darstellungen geht er <strong>in</strong> e<strong>in</strong>e<br />
L<strong>in</strong>earkomb<strong>in</strong>ation von 2 bzw. 3 Basisvektoren über. Für den Vektorraum der Objekte ist auf<br />
diese Weise die <strong>Symmetrie</strong> optimal angepasste Basis gefunden.
53<br />
4.4.1 Zerlegung <strong>des</strong> Dehnungstensors nach irreduziblen Darstellungen<br />
G e z<br />
4 z<br />
2<br />
3<br />
4 z<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
χ 6 0 2 0<br />
∑<br />
=<br />
g<br />
j<br />
m j<br />
*<br />
4<br />
1<br />
χχ<br />
D<br />
D<br />
P<br />
∑<br />
∈<br />
=<br />
G<br />
*<br />
4 g rs<br />
j<br />
j<br />
rs<br />
j<br />
d<br />
A 1 1 1 1 2<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
4<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
B 1 -1 1 -1 2<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
4<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
11<br />
E 1 i -1 i<br />
− 1<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
i<br />
i<br />
22<br />
E 1 i<br />
− -1 i 1<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
i<br />
i<br />
Tabelle 62 Beispiel: Projektionsoperatoren zum Dehnungstensors bei <strong>Symmetrie</strong> e<strong>in</strong>er<br />
vierzähligen Drehachse <strong>in</strong> Richtung c<br />
6<br />
R
54<br />
4.4.2 Basisvektoren zum Dehnungstensor, <strong>Symmetrie</strong> 4<br />
Produkt <strong>des</strong> Projektionsoperators mit dem Dehnungstensor<br />
Komponente<br />
<strong>des</strong> Tensors<br />
<strong>Symmetrie</strong><br />
⎡2<br />
⎢<br />
⎢<br />
2<br />
⎢0<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
2<br />
2<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
4<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0⎤<br />
⎡e<br />
0<br />
⎥ ⎢<br />
⎥ ⎢<br />
e<br />
0⎥<br />
⎢e<br />
⎥ ⋅ ⎢<br />
0⎥<br />
⎢e<br />
0⎥<br />
⎢e<br />
⎥ ⎢<br />
0<br />
⎦ ⎢⎣<br />
e<br />
11<br />
22<br />
33<br />
23<br />
13<br />
12<br />
⎤ ⎡e11<br />
+ e<br />
⎥ ⎢<br />
⎥ ⎢<br />
e11<br />
+ e<br />
⎥ ⎢ e33<br />
⎥ = ⎢<br />
⎥ ⎢ 0<br />
⎥ ⎢ 0<br />
⎥ ⎢<br />
⎥⎦<br />
⎣ 0<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
22<br />
22<br />
∆a<br />
∆b<br />
+<br />
a b<br />
∆c<br />
c<br />
A<br />
Berechnung analog zu der für A.<br />
Bei E 11 , E 22 wählt man den Realteil<br />
aus dem Ergebnisvektor.<br />
∆ a ∆b<br />
−<br />
a b<br />
∆ γ<br />
B<br />
∆ α<br />
E 11<br />
∆ β<br />
E 22<br />
Tabelle 63 Berechnung der Anteile <strong>des</strong> Dehnungstensors zu irreduziblen Darstellungen<br />
A B E 11<br />
Lösung<br />
∆a<br />
∆b<br />
−<br />
a b<br />
Lösung<br />
∆ γ<br />
Lösung<br />
∆ α<br />
Tabelle 6465 Interpretation der Projektionsoperatoren zum Dehnungstensor: Der Tensor ist e<strong>in</strong>e<br />
Summe von Anteilen, deren <strong>Symmetrie</strong>eigenschaft durch ihre irreduzible Darstellung gegeben ist
55<br />
Literatur:<br />
Siegfried Kästner<br />
Autor Titel Verlag / Zeitschrift Ersche<strong>in</strong>ungsjahr<br />
Vektoren, Sp<strong>in</strong>oren,<br />
Tensoren<br />
Akademie Verlag Berl<strong>in</strong> 1964<br />
Eberhard Kl<strong>in</strong>gbeil<br />
A. A. Maradud<strong>in</strong>,<br />
S. H. Vosko<br />
Morton Hamermesh<br />
C. J. Bradley<br />
A. P. Cracknell<br />
Tensorrechnung für<br />
Ingenieure<br />
Symmetry Properties of<br />
the Normal Vibrations of<br />
a Crystal<br />
Group Theory and its<br />
Application to Physical<br />
Problems<br />
The Mathematical Theory<br />
of Solids<br />
Bibliographisches Institut<br />
Mannheim/Wien/Zürich<br />
Review of Modern Physics,<br />
Vol. 40, Number 1<br />
Dover Publications, Inc.<br />
31 East 2 nd Street,<br />
M<strong>in</strong>eola, N. Y. 11501<br />
1966<br />
1968<br />
1989<br />
Clarendon Press, Oxford 1972