Kapitel 3: Fuzzy Systeme
Kapitel 3: Fuzzy Systeme
Kapitel 3: Fuzzy Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3. <strong>Fuzzy</strong>-<strong>Systeme</strong><br />
3.1 <strong>Fuzzy</strong>-Logik<br />
3.1.1 Einführung in die Denkweise<br />
1. Unscharfe Mengen (<strong>Fuzzy</strong>-Sets)<br />
<strong>Fuzzy</strong>-<strong>Systeme</strong> kodieren direkt strukturiertes Wissen (Regeln) in numerischer Form.<br />
Die "<strong>Fuzzy</strong>-Set-Theorie" wurde 1965 von Prof. Zadeh (Uni Berkeley, Kalifornien)<br />
eingeführt. Prof. Zadeh stellte fest: "Herkömmliche (Computer-) Logik kennt keine<br />
Manipulation von Daten, die vage oder subjektive Konzepte repräsentieren. (z.B. Es<br />
ist ziemlich kalt, eine schöne Frau). Die <strong>Fuzzy</strong>-Set-Theorie geht von der Annahme<br />
aus, daß alle Dinge nur zu einem gewissen Grad zutreffen und reduziert die<br />
herkömmliche Logik auf einen Sonderfall. Gerade der Mangel an Präzision<br />
ermöglicht: Das Treffen von Entscheidungen, selbst in Situationen, in denen<br />
unvollständige oder teilweise widersprüchliche Informationen vorliegen.<br />
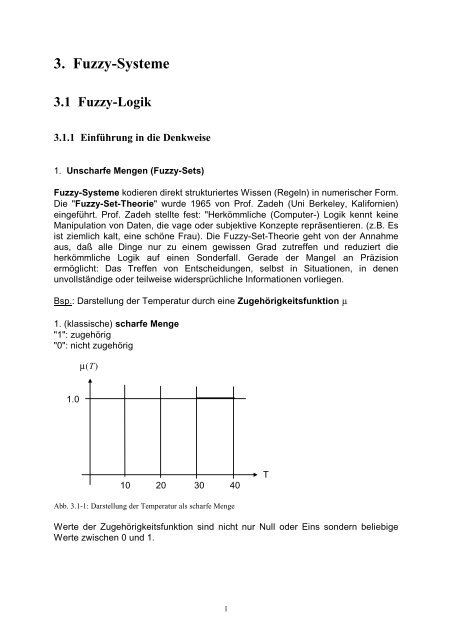
Bsp.: Darstellung der Temperatur durch eine Zugehörigkeitsfunktion µ<br />
1. (klassische) scharfe Menge<br />
"1": zugehörig<br />
"0": nicht zugehörig<br />
µ( T)<br />
1.0<br />
10 20 30 40<br />
T<br />
Abb. 3.1-1: Darstellung der Temperatur als scharfe Menge<br />
Werte der Zugehörigkeitsfunktion sind nicht nur Null oder Eins sondern beliebige<br />
Werte zwischen 0 und 1.<br />
1
µ( T)<br />
1.0<br />
10 20 30 40<br />
T<br />
Abb. 3.1-2: Darstellung der Tempeartur als unscharfe Menge<br />
Ein <strong>Fuzzy</strong>-Set wird durch die Zugehörigkeitsfunktion immer eindeutig dargestellt.<br />
Eine Zugehörigkeitsfunktion kann beliebige Werte zwischen 0 und 1 annehmen.<br />
Dadurch werden beliebig feine Abstufungen zwischen "gehört dazu" und "gehört<br />
definitiv nicht dazu" vorgenommen<br />
2. Funktionstyp<br />
Hinsichtlich des Funktionstyps von Zugehörigkeitsfunktionen haben sich einige<br />
Standardformen herausgbildet: Trapeze und Dreiecke werden am häufigsten<br />
eingesetzt. Für derartige <strong>Fuzzy</strong>-Sets spricht die geringe Anzahl von Parametern (4<br />
bzw. 3 Punkte sind festzulegen) und der geringe Rechenaufwand (Vorteil bei<br />
zeitkritischen Anwendungen). Daneben gibt es <strong>Fuzzy</strong>-Sets mit S-kurvenförmigen<br />
Flanken oder in Form der Normalverteilungsfunktion (Einsatz bei Datenanalyse und<br />
Mustererkennung).<br />
Mathematisch läßt sich ein <strong>Fuzzy</strong>-Set beschreiben als eine geordnete Menge von<br />
Paaren:<br />
A = {(x,µ A<br />
( x)| x ∈ X }<br />
µ A<br />
( x): Zugehörigkeitsfunktion (Untermenge der reellen Zahlen)<br />
3. Operatoren auf <strong>Fuzzy</strong>-Mengen<br />
Informationen werden gewöhnlich durch "UND" und "ODER" miteinander verknüpft.<br />
Die Verknüpfung zweier unscharfer Informationen durch UND und ODER müssen<br />
auch eine Ableitung auf <strong>Fuzzy</strong>-Mengen besitzen, wenn eine <strong>Fuzzy</strong>-Modellierung<br />
einen Sinn haben soll.<br />
Analog zu den Operatoren der Booleschen Algebra UND, ODER und NICHT hat die<br />
"<strong>Fuzzy</strong> Logik" neue Operatoren entwickelt:<br />
Wahrheitsgrad 2er Aussagen, die durch ODER verknüpft sind<br />
(Maximumoperator für die Vereinigung zweier <strong>Fuzzy</strong>-Sets C = A∪ B)<br />
2
µ C<br />
( x)=max{µ A<br />
( X), µ B<br />
( X)} x ∈ X<br />
Wahrheitsgrad 2er Aussagen, die durch UND verknüpft sind<br />
(Minimumoperator für den Durchschnitt zweier <strong>Fuzzy</strong>-Sets C = A∩ B)<br />
µ C<br />
( x)=min{µ A<br />
( X), µ B<br />
( X)} x ∈ X<br />
Wahrheitsgrad der Negation<br />
(Komplement C eines <strong>Fuzzy</strong>-Set A)<br />
µ C<br />
( x)=1-µ A<br />
( X) x ∈ X<br />
Bsp.: Die folgende Darstellung beschreibt die <strong>Fuzzy</strong> Sets "Warm" bzw. "Heiss":<br />
µ( T)<br />
1.0 warm heiss<br />
0.5<br />
10 20 30 40<br />
Temperatur [°C]<br />
Abb.: 3.1-3 Darstellung der <strong>Fuzzy</strong> Sets „Warm“ bzw. „Heiss“<br />
a) Zeichne in die vorstehende Darstellung das <strong>Fuzzy</strong>-Set "heiss und warm" ein.<br />
b) Zeichne in die vorstehende Darstellung das "<strong>Fuzzy</strong>-Set "heiss oder warm" ein.<br />
c) Zeichne in die vorstehende Darstellung das Ergebnis der Komplementbildung aus<br />
dem <strong>Fuzzy</strong>-Set "heiss" (Resultat <strong>Fuzzy</strong>-Set "nicht heiss") ein.<br />
4. Linguistische Variable<br />
Derartige Variable umfassen Werte, die durch Wörter wie "heiß" oder "kalt"<br />
repräsentiert werden. Die einzelnen Werte einer linguistischen Variable werden<br />
durch <strong>Fuzzy</strong>-Sets ausgedrückt:<br />
Bsp.: Die linguistische Variable Raumtemperatur<br />
Die Raumtemperatur kann als linguistische Variable mit den Termen kalt, warm und<br />
heiß aufgefaßt werden. Jeder Term wird als <strong>Fuzzy</strong>-Set modelliert:<br />
3
Zugehörigkeitsgrad<br />
1.0<br />
0.8<br />
kalt warm heiß<br />
0.6<br />
0.4<br />
0.2<br />
10<br />
20<br />
30<br />
Temperatur (°C)<br />
Abb. 3.1-4: Darstellung der linguistischen Variablen Raumtemperatur<br />
5. <strong>Fuzzy</strong>-Regeln<br />
Zur Formulierung von menschlichem Erfahrungswissen werden <strong>Fuzzy</strong>-Regeln<br />
verwendet:<br />
Bsp.: Regeln beim Autofahren<br />
- Wenn der Abstand zum vorderen Auto klein ist und die Geschwindigkeit groß, dann<br />
bremse mit großer Kraft<br />
- Wenn der Abstand zum vorderen Auto mittel ist und die Geschwindigkeit groß,<br />
dann bremse mit mittlerer Kraft.<br />
Die linguistischen Variablen Abstand (D), Geschwindigkeit (V) und Bremskraft (F)<br />
lassen sich so darstellen:<br />
µ( T)<br />
1.0<br />
0.0<br />
50<br />
100<br />
[m] [%] [km/h]<br />
50 100 50 100<br />
Abstand Bremskraft Geschwindigkeit<br />
Abb. 3.1-5: Darstellung der Regeln, Abstand, Bremskraft, Geschwindigkeit<br />
4
Für jede linguistische Variable wurden 3 dreieckige <strong>Fuzzy</strong>-Sets (klein (PS), mittel<br />
(PM) und groß (PL) ) gewählt. Die beiden Regeln sind:<br />
Wenn (D = PS) und (V = PL), dann (F = PL)<br />
Wenn (D = PM) und (V = PL), dann F = PM)<br />
Abstand Geschwindigkeit Bremskraft<br />
Regel 1 PS PL PL<br />
Regel 2 PM PL PM<br />
Regeln können in eine Regeltabelle folgender Gestalt eingetragen werden:<br />
NB<br />
NM<br />
NS<br />
ZR<br />
PS<br />
PM<br />
PB<br />
NB NM NS ZR PS PM PB<br />
Ein unscharfe Variable kann offensichtlich eine Reihe unscharfer Werte annehmen:<br />
NB (Negative Big) bzw. NL (Negative Large)<br />
NM (Negative Medium)<br />
NS (Negative Small)<br />
ZE (Zeroe)<br />
PS (Positive Small)<br />
PM (Positive Medium)<br />
PB (Positive Big) bzw. PL (Positive Large)<br />
Die Regeltabelle zeigt: <strong>Fuzzy</strong>-<strong>Systeme</strong> speichern und verarbeiten unscharfe Regeln<br />
parallel. <strong>Fuzzy</strong>-<strong>Systeme</strong> assoziieren Ausgangs-<strong>Fuzzy</strong>-Sets mit Eingangs-<strong>Fuzzy</strong>-Sets<br />
und verhalten sich wie "quasi" assoziative Speicher.<br />
6. Unscharfe Relationen<br />
Neben unscharfen Mengen sind unscharfe Relationen ein wichtiges Teilgebiet der<br />
<strong>Fuzzy</strong>-Set-Theorie. Unscharfe Relationen bilden die theoretische Basis für die<br />
Realisierung unscharfer Regler und Expertensystemen.<br />
Eine unscharfe (binäre) Relation über dem Produktraum X<br />
R={(( x, y), µ ( x, y)<br />
|( x, y)<br />
∈ X × Y }<br />
R<br />
5<br />
× Y ist definiert durch<br />
Falls X und Y diskrete Mengen sind, dann können X und Y durch Matrizen definiert<br />
werden, z.B.:
X = {grün, gelb, rot} beschreibt die Farbe einer Frucht<br />
Y = {unreif, halbreif, reif} beschreibt den Reifegrad einer Frucht.<br />
Die Paare, die zueinander passen, sind dann<br />
R 1 ={(grün,unreif),(gelb,halbreif),(rot,reif)}<br />
und können in einer Tabelle zusammengefaßt werden:<br />
X \ Y unreif halbreif reif<br />
grün 1 0 0<br />
gelb 0 1 0<br />
rot 0 0 1<br />
Die in der Tabelle zusammengestellten Paare entsprechen den folgenden (auf<br />
Erfahrung beruhenden) Regeln:<br />
WENN eine Frucht grün ist DANN ist sie unreif<br />
WENN eine Frucht gelb ist DANN ist sie halbreif<br />
WENN eine Frucht rot ist DANN ist sie reif<br />
Daraus folgt: Relationen eignen sich zur Modellierung von WENN ... DANN ...-<br />
Regeln.<br />
Da die Relationsmatrix nur Nullen und Einsen enthält, handelt es sich noch nicht um<br />
eine wirkliche <strong>Fuzzy</strong>-Relation. Man weiß aber, daß diese Erfahrungsregeln nur<br />
ungefähr stimmen. Eine <strong>Fuzzy</strong>-Relation R 2 ist dann:<br />
X \ Y unreif halbreif reif<br />
grün 1 0.5 0<br />
gelb 0.3 1 0.3<br />
rot 0 0.5 1<br />
<strong>Fuzzy</strong>-Mengen können auf einfachen Grundmengen (G1, G2, ..) durch Operatoren<br />
wie bspw. den min-Operator für die die UND-Verknüpfung zu <strong>Fuzzy</strong>-Relationen auf<br />
der Kreuzproduktmenge der zugrundliegenden Grundmengen verbunden werden.<br />
Bsp.: Junger UND großer Mann<br />
Gegeben sind die <strong>Fuzzy</strong>-Mengen für "Junger Mann" und "Großer Mann".<br />
6
µ 1<br />
µ 2<br />
1.0<br />
0.0<br />
15<br />
25<br />
Alter<br />
35 170 180<br />
Groesse<br />
Abb. 3.1-6: Die <strong>Fuzzy</strong>-Mengen „junger“ bzw. „großer“ Mann<br />
Ein "junger" UND "großer" Mann ist eine <strong>Fuzzy</strong>-Relation auf den beiden<br />
Grundmengen "Alter" und "Größe":<br />
µ ( Alter , Größe) min( µ ( Alter ), µ ( Größe))<br />
R<br />
= 1 2<br />
Falls die Grundmengen auf 5 äquidistante Stützstellen beschränkt werden, ergibt<br />
sich folgende Tabellendarstellung der Relationsmatrix:<br />
Alter\Größe 170 175 180 185 190<br />
15 0 0 0 0 0<br />
20 0 0.5 0.5 0.5 0.5<br />
25 0 0.5 1 1 1<br />
30 0 0.5 0.5 0.5 0.5<br />
35 0 0 0 0 0<br />
Eine Relation "Junger ODER Großer Mann" kann auf analoge Weise gebildet<br />
werden, indem der min-Operator durch den max-Operator ersetzt wird.<br />
Der Ausdruck µ<br />
R<br />
( x , y ) = min( µ ( x ), µ ( y<br />
1 2<br />
)) heißt Kreuzprodukt oder cartesisches<br />
Produkt der <strong>Fuzzy</strong>-Mengen.<br />
Auch <strong>Fuzzy</strong>-Relationen mit derselben Produktmenge lassen sich miteinander<br />
verknüpfen:<br />
Falls R 1 und R 2 zweistellige <strong>Fuzzy</strong>-Relationen sind, dann gilt für den Durchschnitt<br />
von R 1 und R 2 (UND-Verknüpfung)<br />
µ ( x, y) min( µ ( x, y), µ ( x, y))<br />
R ∩ R<br />
=<br />
R R<br />
1 2 1 2<br />
und für die Vereinigung (ODER-Verknüpfung)<br />
µ ( x, y) max( µ ( x, y), µ ( x, y))<br />
R ∪ R<br />
=<br />
R R<br />
1 2 1 2<br />
7
3.1.2 Verarbeitung in <strong>Fuzzy</strong>-<strong>Systeme</strong>n: <strong>Fuzzy</strong>-Inferenz<br />
<strong>Fuzzy</strong>-Inferenz bedeutet: <strong>Fuzzy</strong>-logisches Schließen auf unscharfen Informationen.<br />
Eine Inferenz besteht aus einer oder mehreren Regeln (Implikationen), einem<br />
Faktum (aktueller Zustand, aktuelles Ereignis) und einer Schlußfolgerung. Sie<br />
ersetzt das Faktum unter Berücksichtigung der Implikation(en) durch ein neues<br />
Faktum.<br />
1. Ein einführendes Beispiel<br />
Grundlage der Verarbeitung unscharfer Mengen mit <strong>Fuzzy</strong> Logik ist die<br />
Produktionsregel.<br />
Ein einführendes Beispiel aus der Prozeßregeltechnik umfaßt die folgenden Regeln:<br />
Regel (1)<br />
WENN Temperatur = sehr hoch<br />
ODER Kammerdruck = übernormal<br />
DANN Ventil gedrosselt<br />
Regel (2)<br />
WENN Temperatur = hoch<br />
UND Kammerdruck = normal<br />
DANN Ventil = halb offen.<br />
Die Abarbeitung derartiger Regeln (linguistische Regeln) unterscheidet sich<br />
allerdings von der Regelbehandlung in einem Expertensystem. In einem<br />
Expertensystem könnte man den Zusammenhang von Regel (1) so beschrieben:<br />
"WENN Temperatur >= 870°C und Kammerdruck >= 40 bar DANN Ventil = 0.3".<br />
Diese Produktionsregel entspricht nicht genau der linguistischen Regel. Die<br />
Definition einer festen (scharf definierten) Schwelle, ab der eine Temperatur als sehr<br />
hoch angesehen wird, ist willkürlich. Die Vorbedingung der Regel ist genau dann<br />
erfüllt, wenn die Bedingungen für Temperatur und Druck gleichzeitig erfüllt sind.<br />
Die Abarbeitung linguistischer Regeln zeigen die folgende Arbeitsschritte, die zur<br />
Beantwortung der Frage " Wie ist die erforderliche Stellung eines Ventils bei einer<br />
Temperatur von 910°C und einem Kammerdruck von 40.7 bar?" anfallen:<br />
<strong>Fuzzy</strong>fizierung<br />
Darunter versteht man: Die linguistische Interpretation technischer Größen<br />
Die technische Größe "Temperatur" wird so interpretiert:<br />
8
Zugehörigkeitsgrad<br />
1.0<br />
0.0<br />
400 500 600 700 800 900 1000<br />
Abb. 3.1-7: Temperatur in der Kammer<br />
Im vorliegenden Fall gilt bspw. für die Tempeartur 910°C:<br />
sehr hoch 0.8<br />
hoch 0.3<br />
mittel 0.0<br />
niedrig 0.0<br />
Die technische Größe "Druck" wird so interpretiert:<br />
Zugehörigkeitsgrad<br />
Temperatur (°C)<br />
1.0<br />
0.0<br />
39 40<br />
41<br />
Druck (bar)<br />
Abb. 3.1-8: Druck in der Kammer<br />
9
Im vorliegenden Fall gilt für den Druck 40.5 bar:<br />
unter normal 0.0<br />
normal 0.5<br />
über normal 0.5<br />
Berechnung der Wahrscheinlichkeiten für Vorbedingungen zu Regeln<br />
Die Vorbedingungen zu Regel (1) bzw. Regel(2) des einführenden Beispiels lassen<br />
sich berechnen:<br />
Regel (1): max(0.8, 0.3) = 0.8<br />
Regel (2): min(0.3, 0.5) = 0.3<br />
10
Zurückführung der Resultate der Regeln<br />
Auch für die Stellung des Ventils wird eine linguistische Variable eingeführt:<br />
Zugehörigkeitsgrad<br />
1.0<br />
0.0<br />
4 8 12<br />
Durchfluß<br />
Abb. 3.1-9: Ventil<br />
Die linguistische Variable Ventil beschreibt die einem Brennofen zuzuführende<br />
Menge an Brennstoffen (als Reaktion auf den in einer Brennkammer herrschenden<br />
Druck und Temperatur).<br />
Zur Zurückführung der Resultate der Regeln auf deren Definition gibt es in der<br />
<strong>Fuzzy</strong>-Logik 2 alternative Methoden:<br />
- die Max-Min-Inferenz<br />
- die Max-Prod-Inferenz<br />
Max-Min-Inferenz<br />
Die unscharfe Menge der Terme der linguistischen Variablen "Ventil" werden jeweils<br />
auf den Wahrheitsgrad der Vorbedingung begrenzt (Minimum). Die so erhaltenen<br />
Mengen werden zu einer einzigen zusammengefaßt (Maximum). Diese unscharfe<br />
Menge ist das Resultat der Inferenz.<br />
11
Zugehörigkeitsgrad<br />
1.0<br />
0.0<br />
4 8 12<br />
Durchfluß<br />
Abb. 3.1-10: Max-Min-Inferenz<br />
Max-Prod-Inferenz<br />
Es wird ein Produkt aus unscharfer Menge des Terms der Schlußfolgerung und des<br />
Wahrheitsgrads der Vorbedingung gebildet.<br />
Zugehörigkeitsgrad<br />
1.0<br />
0.0<br />
4 8 12<br />
Durchfluß<br />
Abb. 3.1-11: Max-Prod-Inferenz<br />
Als Ergebnis erhält man für die Stellung des Methanventils der beiden Methoden<br />
eine unscharfe Menge.<br />
12
Defuzzifizierung<br />
Es gibt hierfür verschiedene Methoden. Am häufigsten wird benutzt: Berechnung der<br />
technischen Größe aus dem Flächenschwerpunkt der unscharfen Menge.<br />
Zugehörigkeitsgrad<br />
1.0<br />
0.0<br />
4 8 12<br />
Durchfluß<br />
Abb. 3.1-12: Ermitteln des Flächenschwerpunkts<br />
Im angegebenen Beispiel ergibt sich die Stellung des Ventils zu 2.7 m 3 /h<br />
2. <strong>Fuzzy</strong>-Inferenzschema<br />
Eine <strong>Fuzzy</strong>-Inferenz ist eine Verarbeitungsvorschrift für WENN.. DANN.. -Regeln<br />
bzw, für ganze Gruppen von Regeln für unscharfe Aussagen. In der <strong>Fuzzy</strong>-Linguistik<br />
kann zur Modellierung von WENN.. DANN.. -Regeln der min-Operator benutzt<br />
werden.<br />
Bsp.: Erhitzen von Wasser<br />
Regel: WENN Temperatur T = niedrig DANN Wärmezufuhr hoch<br />
Zugehörigkeitsfunktion für die linguistische Terme Tempeartur und Wärmezufuhr:<br />
13
Zugehörigkeitsgrad<br />
Zugehörigkeitsgrad<br />
µ T<br />
niedrig<br />
µ W<br />
hoch<br />
1.0<br />
1.0<br />
0.0<br />
10 30<br />
50<br />
T (°C)<br />
0.0<br />
50<br />
60 80<br />
100<br />
Relationsmatrix (ermittelt über das Kreuzprodukt): µ ( T, W) = min( µ ( T), µ ( W))<br />
W 60 70 80 90 100<br />
T<br />
10 0 0 0 0 0<br />
20 0 0.5 0.5 0.5 0<br />
30 0 0.5 1 0.5 0<br />
40 0 0.5 0.5 0.5 0<br />
50 0 0 0 0 0<br />
R T W<br />
W (%)<br />
Die gebräuchlichste Art einer Inferenz 1 ist die Max-Min-Komposition. So ergibt sich<br />
bspw. für das aktuelle Faktum T = 20°C das folgende Inferenzergebnis:<br />
µ<br />
Whoch' ( W) = µ<br />
R<br />
( T = 20° C, W) = min( µ<br />
Tniedrig( 20°<br />
C), µ<br />
Whoch<br />
( W))<br />
µ R<br />
ist die über das Kreuzprodukt von Prämissen- und Konklusions-<strong>Fuzzy</strong>-Mengen<br />
gewonnene <strong>Fuzzy</strong>-Relation der Regel.<br />
Aus der Relationsmatrix kann abgelesen werden: µ Whoch'<br />
( W) = ( 0, 0. 5, 0. 5, 0. 5, 0)<br />
Grafisch kann der Inferenzvorgang so dargestellt werden:<br />
Zugehörigkeitsgrad<br />
Zugehörigkeitsgrad<br />
µ W<br />
µ T<br />
niedrig<br />
0.5<br />
hoch<br />
1.0<br />
1.0<br />
0.5<br />
µ W hoch'<br />
0.0<br />
0.0<br />
10 30<br />
50<br />
T (°C)<br />
50<br />
60 80<br />
100<br />
W (%)<br />
Abb. 3.1-16: Darstellung des Inferenzvorgangs<br />
Die Eingangsgröße ist ein scharfer Temperaturwert von 20°C und somit als<br />
Singleton µ Whoch'<br />
auf der Grundmenge G 1 = {10,20,30,40,50} der Temperatur<br />
1 Eine Inferenz ist eine Verarbeitungsvorschrift für WENN... DANN... Regeln unter Berücksichtigung eines<br />
aktuellen Faktums (Ereignisses). Sie hat eine Schlußfolgerung als Ergebnis<br />
14
darstellbar. Das Inferenzergebnis erhält man dann auch über die Relationsmatrix<br />
durch:<br />
⎛0 0 0 0 0⎞<br />
⎜<br />
⎟<br />
⎜0 05 . 05 . 05 . 0⎟<br />
µ Whoch'<br />
= ⋅<br />
⎜<br />
⎟<br />
0 05 . 05 . 05 . 0<br />
⎜<br />
⎟<br />
⎝0 0 0 0 0⎠<br />
( 0 1 0 0 0) ⎜0 05 . 1 05 . 0⎟<br />
= ( 0 05 . 05 . 05 . 0)<br />
Verarbeitungsvorschrift zur Ermittlung der <strong>Fuzzy</strong>-Ergebnismenge<br />
Das Max-Min-Inferenzschema liefert bei einer Regel WENN A DANN B mit dem<br />
linguistischen Term µ A<br />
( x) in der Prämisse und dem Term µ B<br />
( y) in der Konklusion<br />
bei Vorliegen einer scharfen Eingangsgröße x' eine Ergebnis-<strong>Fuzzy</strong>-Menge µ ( B '<br />
y ).<br />
Diese kann in der zu x' zugehörgen Zeile µ R<br />
( x', y) der über das Kreuzprodukt<br />
gebildeten Relationsmatrix der Regel unmittelbar abgelesen oder grafisch ermittelt<br />
werden, indem man die <strong>Fuzzy</strong>-Menge µ B<br />
( y) der Konklusion in der Höhe des<br />
Erfüllungsgrads µ A<br />
( x') abschneidet.<br />
Verhalten bei mehreren Regeln<br />
Für jede weitere Regel kommt eine entsprechende Relationsmatrix hinzu. Die<br />
Regeln innerhalb des Systems von Regeln sind i.a. ODER verknüpft. Die<br />
Relationsmatrizen werden daher über den "Max"-Operator verbunden. Ergebnis ist<br />
eine einzige Relationsmatrix, die alle Regeln enthält und wie im Falle einer Regel<br />
ausgewertet werden kann. Alternativ dazu kann man die Regeln zunächst getrennt<br />
voneinander auswerten und im Abschluß daran deren Ergebnis-<strong>Fuzzy</strong>-Mengen mit<br />
dem Max-Operator überlagern.<br />
Bsp.: Erhitzen von Wasser<br />
Regelbasis<br />
R 1 : WENN T = sehr_niedrig DANN W = sehr_hoch<br />
R 2 : WENN T = niedrig DANN W = hoch<br />
R 3 : WENN T = mittel DANN W = mittel<br />
R 4 : WENNT = hoch DANN W = niedrig<br />
R 5 : WENN T = sehr_hoch DANN W = sehr_niedrig<br />
Linguistische Variable für Temperatur T und Wärmezufuhr W<br />
15
Zugehörigkeitsgrad<br />
µ T<br />
1.0<br />
sehr niedrig niedrig mittel hoch sehr hoch<br />
0.75<br />
0.25<br />
0.0<br />
10 30<br />
50 70<br />
100<br />
T(°C)<br />
Zugehörigkeitsgrad<br />
µ W<br />
1.0<br />
sehr niedrig niedrig mittel hoch sehr hoch<br />
0.0<br />
10 20 30 40 50 60 70 80 90 100<br />
Abb. 3.1-18: Linguistische Terme für Temperatur und Wärmezufuhr<br />
W(%)<br />
Ziel: Ermitteln einer geeigneten Wärmezufur für einen scharfen Temperaturwert T =<br />
45°C.<br />
Lösungsschema:<br />
1) Fuzzifizierung der scharfen Eingangsgröße<br />
⎛µ<br />
⎜<br />
⎜ µ<br />
⎜ µ<br />
⎜<br />
⎜ µ<br />
⎜<br />
⎝ µ<br />
Tsehr _ niedrig<br />
Tniedrig<br />
Tmittel<br />
Thoch<br />
Tsehr _ hoch<br />
( T)<br />
⎞ ⎛ 0 ⎞<br />
⎟ ⎜ ⎟<br />
( T)<br />
⎟ ⎜0.<br />
25⎟<br />
( T)<br />
⎟ = ⎜0.<br />
75⎟<br />
⎟ ⎜ ⎟<br />
( T)<br />
⎟<br />
0<br />
( T)<br />
⎟ ⎜ ⎟<br />
⎠ ⎝ 0 ⎠<br />
16
2) Ermitteln der aktiven Regeln<br />
Eine Überprüfung der Regelbasis zeigt, daß lediglich die Regeln R 2 und R 3 aktiv<br />
sind, d.h. einen Erfüllungsgrad größer als Null besitzen:<br />
- Der WENN-Teil von R 2 ist zu µ Tniedrig<br />
( T) = 0.<br />
25 erfüllt<br />
- Der WENN-Teil von R 3 ist zu µ Tmittel<br />
( T) = 0.<br />
75 erfüllt<br />
bzw.<br />
- R 2 besitzt den Erfüllungsgrad H 2 =0.25<br />
- R 3 besitzt den Erfüllungsgrad H 3 =0.75<br />
3) Ermittlung der einzeln Ausgangs-<strong>Fuzzy</strong>-Mengen<br />
Die Anwendung jeder aktiven Regel liefert auf der Basis des Inferenzschemas die<br />
resultierende Ausgangs-<strong>Fuzzy</strong>-Menge, indem man den Erfüllungsgrad der Regel auf<br />
die jeweilige <strong>Fuzzy</strong>-Menge in der Schlußfolgerung überträgt. Dazu wird das<br />
Minimum von Erfüllungsgrad und Ausgangs-<strong>Fuzzy</strong>-Menge min( H , µ ( W))<br />
gebildet,<br />
d.h. Die Ausgangs-<strong>Fuzzy</strong>-Menge in der Höhe H i abgeschnitten.<br />
i<br />
W i<br />
Zugehörigkeitsgrad<br />
µ<br />
T<br />
Zugehörigkeitsgrad<br />
µ W<br />
hoch<br />
1.0<br />
niedrig<br />
1.0<br />
H 2<br />
0.0<br />
0.0<br />
10 20 30 40 50 60 70 80 90 100<br />
T(°C)<br />
10 20 30 40 50 60 70 80 90 100<br />
W(%)<br />
Zugehörigkeitsgrad<br />
Zugehörigkeitsgrad<br />
µ W<br />
µ T<br />
mittel<br />
1.0<br />
1.0<br />
mittel<br />
0.0<br />
0.0<br />
10 20 30 40 50 60 70 80 90 100<br />
T(°C)<br />
10 20 30 40 50 60 70 80 90 100<br />
W(%)<br />
Abb. 3.1-19: Auswertung der Regeln<br />
4) Überlagerung der einzelnen Ausgangs-<strong>Fuzzy</strong>-Mengen<br />
Da die einzelnen Regeln implizit ODER-Verknüpfungen sind, müssen die<br />
zugehörigen Ergebnis-<strong>Fuzzy</strong>-Mengen über den Max-Operator zur resultierenden<br />
Ausgangs-<strong>Fuzzy</strong>-Menge µ ( W) = max(min( H , µ ( W)))<br />
vereinigt werden.<br />
Wres i W<br />
i<br />
17
Zugehörigkeitsgrad<br />
µ W<br />
1.0<br />
0.0<br />
10 20 30 40 50 60 70 80 90 100<br />
W(%)<br />
Abb. 3.1-20: Überlagerung der <strong>Fuzzy</strong>-Mengen<br />
5) Defuzzifizierung<br />
Aus der resultierenden Ergebnis-<strong>Fuzzy</strong>-Menge muß in den meisten Fällen ein<br />
scharfer Ausgangswert bestimmt werden.<br />
3. Anwendung<br />
Aufgabe: Ein Fahrzeug ist auf dem Gipfel eines Berges zu halten.<br />
Problem: Durch die Schwerkraft wird das Fahrzeug immer bestrebt sein. den Berg<br />
auf der anderen Seite hinabzurollen. Zusätzlich können Störkräfte (Rauschkomponenten)<br />
und Handsteuerkräfte vom Bediener (über Cursor-Tasten simuliert)<br />
vorkommen.<br />
Hangabtriebskraft<br />
Rauschkraft<br />
Handsteuerkraft<br />
Bewegungssimulation<br />
des <strong>Fuzzy</strong>-Mobils<br />
v<br />
x<br />
<strong>Fuzzy</strong>-Kraft<br />
<strong>Fuzzy</strong>-Steuerung<br />
Abb. 3.1-21: Block-Diagramm der <strong>Fuzzy</strong>-Steuerung<br />
18
Lösung: Zur Lösung des Problems wird ein Prozeß simuliert, der als Meßwerte die<br />
aktuelle Geschwindigkeit v → und Position x → liefert und der durch eine Anzahl von<br />
Kraftkomponenten beeinflußt wird, die als Stör- und Steuergrößen wirken. das<br />
Simulationsprogramm muß Bewegungssimulation und <strong>Fuzzy</strong>-Steuerung realisieren 2 .<br />
physikalisches Grundwissen:<br />
→<br />
(1) K = m⋅ b = m⋅ d v ≈ m⋅ ∆v dt ∆t<br />
→<br />
Falls die Zeitdifferenz klein genug gewählt wird und die Kraft sich im betrachteten<br />
Zeitraum nicht oder nur unwesentlich ändert, kann man die Differentiale durch<br />
Differenzen ersetzen und die Geschwindigkeit zum Zeitpunkt t berechnen.<br />
→<br />
→<br />
K( t)<br />
→<br />
(2) v( t + 1) = v( t)<br />
+ ⋅∆<br />
t − v( t)<br />
⋅ k R<br />
m<br />
→<br />
In (2) ist noch eine geschwindigkeitsabhängige Kraftkomponente mit dem<br />
Reibungskoeffizienten k R eingeführt.<br />
Die Geschwindigkeit ist die 1. Ableitung des Weges →<br />
x nach der Zeit. Man kann die<br />
neue Position zum Zeitpunkt t+1 aus der Position zum Zeitpunkt t berechnen:<br />
→ → →<br />
(3) x( t + 1) = x( t) + v( t)<br />
⋅∆<br />
t<br />
Zur Berechnung der Bewegung fehlt in (2) noch die Kraft. Sie setzt sich zusammen<br />
→<br />
aus der Hangabtriebskraft K H , Rauschkraft KR , Handsteuerkraft KS<br />
→<br />
:<br />
→ → → → →<br />
Steuerkraft K F<br />
(4) K( t) = K ( t) + K ( t) + K ( t) + K ( t)<br />
H R S F<br />
→<br />
→<br />
und der <strong>Fuzzy</strong>-<br />
Die Handsteuerkraft wird durch Tastenbetätigung festgelegt, die Rauschkraft wird<br />
als Zufallswert zwischen 0 und einer definierten Maximalkraft bestimmt.<br />
α<br />
Geländefunktion P(x)<br />
→<br />
K<br />
G<br />
→<br />
K<br />
H<br />
Abb. 3.1-22: Kräfte in Abhängigkeit vom Bodenprofil<br />
2 Auch in der Praxis wird so verfahren: Zuerst möglichst exakte Prozeßsimulation, danach Kopplung mit<br />
<strong>Fuzzy</strong>-Steuerung und Test<br />
19
In Abhängigkeit vom Winkel des Gefälles zerlegt sich die Gewichtskraft K G<br />
→<br />
→<br />
in K H<br />
(läuft parallel zum Hintergrund) und eine zu K H<br />
rechtwinklige Komponente. Die<br />
Bewegung ist im wesentlichen eindimensional. Auf die Vektordarstellung kann daher<br />
verzichtet werden. Unter Anwendnung einiger geometrischer Beziehungen ergibt<br />
sich folgende Gleichung:<br />
→<br />
(5) K H ( x) = − K G⋅<br />
sin α( x)<br />
→<br />
Der Winkel hängt vom Bodenprofil ab. Für die Berechnung des Winkels gilt die<br />
Gleichung:<br />
(6) α( x) = arctan( P'( x))<br />
Ersetzt man α in Gleichung (5) durch Gleichung (6) erhält man:<br />
P'( x)<br />
(7) − KG<br />
=<br />
2<br />
1+<br />
( P'( x))<br />
Mit Gleichung (7) wird die Hangabtriebskraft berechnet und mit mit den<br />
verbleibenden Kräften zur Gesamtkraft überlagert. Mit dieser Kraft und Gleichung (2)<br />
wird die Änderung der Geschwindigkeit berechnet. Über Gleichung (3) wird die neue<br />
Position ermittelt.<br />
Regeln: Das <strong>Fuzzy</strong>-System erhält vom Simulationsmodell die Daten der<br />
momentanen Geschwindigkeit v und der Position x. Das Steuersystem hat die<br />
Zielvorgabe, das Fahrzeug bei der Position x=0 mit der Geschwingkeit v=0 zu<br />
halten. Sieben <strong>Fuzzy</strong>-Regeln 3 mit den Ausgangspunkten Betrag und Richtung der<br />
Geschwindigkeit und der Position sollen eine linguistische Verknüpfung mit der<br />
Steuerkraft erreichen:<br />
(A) Wenn die Position positiv mittel (PM) ist, und die Geschwindikeit ist nahezu Null<br />
(ZR), dann ist die Kraft negativ mittel (NM).<br />
(B) Wenn die Position positiv klein (PS) ist, und die Geschwindigkeit ist positiv klein<br />
(PS), dann ist die Kraft negativ klein (NS).<br />
(C) Wenn die Position positiv klein (PS) ist, und die Geschwindigkeit ist negativ klein<br />
(NS), dann ist die Kraft nahezu Null (ZR).<br />
(D) Wenn die Position negativ mittel (NM) ist, und die Geschwindigkeit ist nahezu<br />
Null (ZR), dann ist die Kraft positiv mittel (PM).<br />
(E) Wenn die Position negativ klein (NS) ist, und die Geschwindigkeit ist negativ<br />
klein (PS), dann ist die Kraft positiv klein (PS).<br />
(F) Wenn die Position negativ klein (PS) ist, und die Geschwindigkeit ist positiv klein<br />
(NS), dann ist die Kraft nahezu Null (ZR).<br />
(G) Wenn die Position nahezu Null (ZR) ist, und die Geschwindigkeit ist nahezu Null<br />
(ZR), dann ist die Kraft nahezu Null (ZR).<br />
→<br />
Geschw.<br />
Position<br />
NB<br />
NM NS ZR PS PM<br />
3 Die Regeln werden aus dem Wissen über den Prozeß festgelegt<br />
20
NM<br />
(D) PM<br />
NS (E) PS (F) ZR<br />
ZR<br />
(G) ZR<br />
PS (C) ZR (B) NS<br />
PM<br />
(A) NM<br />
PB<br />
Zugehörigkeitsfunktionen: Diese Funktionen für Position, Geschwindigkeit und Kraft<br />
sind einfache lineare Funktionen .<br />
Regel (E)<br />
Wegverteilung<br />
Geschwindigkeitswert<br />
Kraftverteilung<br />
NM<br />
NS<br />
1.0<br />
PS<br />
PM<br />
NS<br />
1.0<br />
ZR<br />
PS<br />
NM<br />
NS<br />
PS PM<br />
-2<br />
0.0 2 -1<br />
0.0<br />
1<br />
-400<br />
0.0<br />
400<br />
Regel (G)<br />
Wegverteilung<br />
Geschwindigkeitswert<br />
Kraftverteilung<br />
NM<br />
NS<br />
1.0<br />
PS<br />
PM<br />
NS<br />
1.0<br />
ZR<br />
PS<br />
NM<br />
NS<br />
PS PM<br />
-2<br />
0.0 2 -1<br />
0.0<br />
1<br />
-400<br />
0.0<br />
400<br />
Wegverteilung<br />
Geschwindigkeitswert<br />
Kraftverteilung<br />
NM<br />
NS<br />
1.0<br />
PS<br />
PM<br />
1.0<br />
NM NS<br />
PS PM<br />
ZR<br />
-2<br />
0.0 2 -1<br />
0.0<br />
1<br />
-400<br />
400<br />
21
Abb. 3.1-23: Darstellung zur Ermittling der Kraftverteilung<br />
Ermittlung der <strong>Fuzzy</strong>-Kraft: Das Steuersystem soll bspw. vom Prozeß den<br />
Geschwindigkeitswert v = -0.6 (m/s) und die Position x = -0.2 (m) übergeben. Mit<br />
Hilfe der <strong>Fuzzy</strong>-Regeln und den Zugehörigkeitsfunktionen sind dann die<br />
Wahrheitswerte für Geschwindigkeit und Position auszurechnen.<br />
Berechnung des Schwerpunkts: Generell gilt für diese Berechnung einer beliebigen<br />
Funktion in x-Richtung:<br />
(8) S<br />
x<br />
=<br />
∫<br />
∫<br />
dx⋅ x⋅<br />
f ( x(<br />
dx ⋅ f ( x)<br />
Da die vorliegende Fläche aus mehreren Teilstücken besteht, müssen die<br />
Einzelstücke getrennt aufsummiert werden:<br />
(9) S<br />
x<br />
=<br />
∑<br />
k<br />
∑<br />
k<br />
∫<br />
dx⋅ x ⋅ f<br />
∫<br />
dx ⋅ f<br />
k<br />
k<br />
( x)<br />
( x)<br />
Die Fläche setzt sich aus linearen Funktionsabschnitten zusammen (, die der<br />
Beziehung f(x) = ax + b entsprechen). Das führt, in (9) eingesetzt, zu:<br />
(10) S<br />
x<br />
=<br />
∑<br />
k<br />
∫<br />
∑<br />
k<br />
2<br />
dx ⋅ ( a ⋅ x + b ⋅ x)<br />
∫<br />
k<br />
dx ⋅ ( a ⋅ x + b)<br />
k<br />
k<br />
Die Integration dieses Ausdrucks und Eingabe der Grenzen für die einzelnen<br />
Funktionsabschnitte (, dabei soll für das Teilstück f k (x) der Anfangspunkt (P Ak (x Ak ,y Ak )<br />
und der Endpunkt P Ek (X Ek ,y Ek ) gelten,) führt zu:<br />
(11) S<br />
x<br />
=<br />
∑<br />
k<br />
∑<br />
k<br />
⎧ 2 ⎛ b<br />
k ⎞<br />
x<br />
Ek ⎜a k<br />
⋅ x<br />
Ek<br />
+ x<br />
Ak<br />
a<br />
k<br />
⎝ ⎠<br />
⎟ − 2<br />
⋅ ⎛<br />
⎨ / 3<br />
⎜ / 3<br />
⎩<br />
3 ⎝<br />
+<br />
⎧ ⎛<br />
b<br />
k ⎞<br />
x<br />
Ek⎜a k<br />
⋅ x<br />
Ek<br />
+ x<br />
Ak<br />
a<br />
k<br />
⎝ ⎠<br />
⎟ − 2 ⎛<br />
⎨ / 2<br />
⎜ / 3<br />
⎩<br />
2 ⎝<br />
+<br />
b<br />
k ⎞⎫<br />
⎟⎬<br />
2 ⎠⎭<br />
b<br />
k ⎞⎫<br />
⎟⎬<br />
2 ⎠⎭<br />
In (11) fehlen noch die Koeffizienten ak und bk für die einzelnen Funktionsabschnitte<br />
(Berechnung aus den Anfangs- und Endpunkten der einzelnen Teilstücke):<br />
a<br />
k<br />
=<br />
y<br />
x<br />
Ek<br />
Ek<br />
−<br />
−<br />
y<br />
x<br />
Ak<br />
Ak<br />
b<br />
k<br />
= y<br />
Ak<br />
− a<br />
k<br />
⋅ x<br />
Ak<br />
22
3.1.3 Regelbasierte <strong>Systeme</strong><br />
1. <strong>Fuzzy</strong>-Logik regelbasierter <strong>Systeme</strong><br />
Ein regelbasiertes System besteht aus einem System von Inferenzregeln und einem<br />
Inferenzschema, das die Verarbeitungsvorschrift enthält, nach der (scharfe)<br />
Eingangsgrößen x i mit Hilfe der Inferenzregeln zu (scharfen) Ausgangsgrößen y j<br />
verarbeitet werden.<br />
x<br />
1<br />
......<br />
x<br />
n<br />
Regelbasiertes<br />
System<br />
y<br />
Abb. 3.1-25: Regelbasiertes System mit n Eingangsgrößen und einer Ausgangsgröße:<br />
Regelbasis:<br />
R 1 : WENN x 1 = A 11 ... UND x i = A 1i ... UND x n = A 1n DANN y = B 1<br />
...<br />
R j : WENN x 1 = A j1 ... UND x i = A ji ... UND x n = A jn DANN y = B j<br />
R m : WENN x 1 = A m1 ... UND x i = A mi ... UND x n = A mn DANN y = B m<br />
x 1 , x 2 , ... , x n : Eingangsfrößen<br />
A 1i , A 2i , A 3i , ... , A mi : linguistische Terme der Eingangsgröße x i<br />
y: Ausgangsgröße<br />
B 1 , B 2 , ... , B m : linguistische Terme der Ausgangsgröße<br />
resultierede <strong>Fuzzy</strong>-Menge<br />
Einem aktuellen Satz von Eingangsgrößen wird mit Hilfe des Inferenzschemas (unter<br />
Beachtung der Regelbasis) eine <strong>Fuzzy</strong>-Menge zugeordnet, die aus den Ergebnissen<br />
aller Regeln zusammnegesetzt ist:<br />
'<br />
'<br />
R 1 : min( µ ( x ),..., µ ( x ), µ ( y)) = µ ( y)<br />
.......<br />
11 1 1n n B1 B'<br />
1<br />
'<br />
'<br />
R j : min( µ ( x ),..., µ ( x ), µ ( y)) µ ( y)<br />
.......<br />
j1 1 jn n Bj<br />
=<br />
B'<br />
j<br />
'<br />
'<br />
R m : min( µ ( x ),..., µ ( x ), µ ( y)) µ ( y)<br />
m1 1 mn n Bm<br />
=<br />
B'<br />
m<br />
23
Verbunden durch den ODER-Operator max entsteht die resultierende <strong>Fuzzy</strong>-Menge:<br />
µ = max( µ ( y),..., µ ( y))<br />
res B'<br />
i B'<br />
m<br />
Aufgabe der <strong>Fuzzy</strong>-Control (Defuzzifizierung) ist das Finden einer scharfen<br />
Ausgangsgröße y:<br />
x<br />
1<br />
......<br />
x<br />
n<br />
Fuzzifizierer<br />
Regelbasis<br />
Inferenzschema<br />
Defuzzifizierer<br />
y<br />
Abb.3.1-26: Komponenten eines regelbasierten System<br />
2. Defuzzifizierung<br />
a) Maximum-Methode<br />
Nur die Regel mit dem höchsten Erfüllungsgrad bei einer vorgegebenen<br />
Eingangsgröße wird betrachtet. Das Maximum der zugehörigen Ausgangs-<strong>Fuzzy</strong>-<br />
Menge bestimmt die scharfe Ausgangsgröße. Die Maximum-Methode wird bei der<br />
<strong>Fuzzy</strong>-Modellierung am besten dadurch vorbereitet, daß die Ausgangsmenge jeder<br />
Regel einzeln vorgegeben wird. Es muß bei der Modellierung darauf geachtet<br />
werden, daß immer mindestens eine Regel aktiv ist, da sonst keine Entscheidung<br />
gefällt wird.<br />
Die Methode ist besonders geeignet für Probleme der Mustererkennung.<br />
b) Maximum-Mittel-Methode<br />
Sie gleicht zunächst der Maximum-Methode. Falls mehr als eine Regel maximalen<br />
Erfüllungsgrad hat, werden zu dieser Regel gehörende scharfe Ausgangsgrößen<br />
arithmetisch gemittelt.<br />
c) Akkumulationsmethode<br />
Auch hier wird zunächst ein Inferenzverfahren nach der unter a) beschriebenen<br />
Mustererkennungsmethode gebildet. Zu jeder Regel wird in Gestalt eines Singletons<br />
ein scharfer Ausgangswert angegeben, der von einem vorhandenen (aktuellen) Wert<br />
abzuziehen ist oder zu ihm hinzuaddiert werden muß, falls die Regel maximalen<br />
Erfüllungsgrad hat.<br />
d) Schwerpunktmethode<br />
Der Flächenschwerpunkt der aus allen Ergebnis-<strong>Fuzzy</strong>-Mengen von Regeln nach<br />
dem Inferenzschema resultierenden Ausgangs-<strong>Fuzzy</strong>-Menge wird über der<br />
Ausgangsgröße gebildet und seine Abszisse als scharfe Ausgangsgröße y res<br />
bestimmt:<br />
24
y<br />
res<br />
=<br />
∞<br />
∫<br />
y ⋅µ<br />
0<br />
∞<br />
∫<br />
0<br />
µ<br />
res<br />
res<br />
( y)<br />
dy<br />
( y)<br />
dy<br />
3. Anwendung<br />
Aufgabe: Die nachfolgende Abbildung zeigt einen Stab, der über ein Pendelgelenk<br />
auf einem Wagen befestigt ist. Durch Vor- und Rückbewegen des Wagens soll der<br />
Stab aufrechtstehend gehalten werden.<br />
K Z<br />
2L<br />
Θ : Winkel<br />
M g : Gewicht des Wagens<br />
Θ<br />
m : Gewicht des Pendels<br />
g<br />
m g x : Gewicht des Pendels<br />
K V<br />
2L : Länge des Pendels<br />
KH<br />
K : vertikale Kraft am Gelenk<br />
V<br />
M g K<br />
H<br />
: horizontale Kraft am Gelenk<br />
K : ziehende Kraft am Wagen<br />
K<br />
V<br />
g<br />
I<br />
Z<br />
: Fallbeschleunigung<br />
: Trägheitsmoment des Stabs<br />
.<br />
Abb. 3.1-26: Modell des kopstehenden Pendels<br />
Mathematisches Modell: Die Steuerung der Bewegungsrichtung und der Richtung<br />
des Wagens kann über das folgende Differentialgleichungssystem beschrieben<br />
werden:<br />
(1) I ⋅ Θ'' = KV<br />
⋅ sin Θ − KH<br />
⋅ L⋅<br />
cosΘ<br />
(2) K − m ⋅ V<br />
g = − m ⋅ L ⋅ ( Θ '' ⋅ sin Θ + Θ ' 2 ⋅ cos Θ )<br />
(3) K = m ⋅ H<br />
x'' + m ⋅ L( Θ '' ⋅ cos Θ − Θ ' 2 ⋅ sin Θ )<br />
(4) KZ<br />
− KH<br />
= M ⋅ x''<br />
Θ : Winkel, 2⋅L: Länge des Pendel, x: Position des Wagens,m: Masse des Pendels,<br />
M: Masse des Wagens, x: Position des Wagen, K V<br />
: vertikale Kraft am Gelenk, K H<br />
:<br />
m<br />
horizontale Kraft am Gelenk, K Z<br />
: ziehende Kraft am Wagen, g = 9.<br />
81<br />
s 2<br />
25
Fallbeschleunigung, I<br />
Drehgelenk<br />
1<br />
= ⋅ m⋅<br />
L<br />
2 : Trägheitsmoment des Stabs in Bezug auf das<br />
3<br />
Lösungsmöglichkeiten:<br />
1. Man könnte dieses Differentialgleichungssystem in ein Differenzengleichungssystem<br />
verwandeln und für die jeweils gegebenen Anfangsbedingungen<br />
die Lösung mit Computerberechnung bestimmen. Dieses Verfahren ist aber sehr<br />
rechenaufwendig und daher nicht in der Lage, die zur Steuerung des Wagens<br />
benötigten Ergebnisse rechtzeitig zu liefern..<br />
2. Man vereinfacht das Problem durch Annahme zusätzlicher Restriktionen.<br />
Yamakawa 4 schlägt die Annahme Θ
Zugehörigkeitsgrad<br />
NL NM NS 1.0<br />
PS<br />
PM<br />
PL<br />
ZR<br />
0.0<br />
Abb. 3.1-30: Darstelling der linguistischen Ausprägungen Θ , Θ' und x'<br />
Wird eine konkrete Situation betrachtet, so muß überprüft werden, ob die<br />
beobachtete Situation mit einer oder mehreren in dem Regelblock beschriebenen<br />
Situationen übereinstimmt. Aus den Erfüllungsgraden für die einzelnen<br />
Zustandsvariablen wird dann mit Hilfe des Minimumoperators der Erfüllungsgrad der<br />
Regel bestimmt. Treffen mehrere Regeln für eine konkrete Situation zu, dann<br />
bezeichnet man über die Max-Min-Inferenz die unscharfe Vereinigungsmenge aller<br />
unscharfen Aktionen. Eine konkret ausführbare Aktion bestimmt man im<br />
Defuzzifizierungsschritt aus dem Flächenschwerpunktverfahren.<br />
27
A<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
B<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
C<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
G<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
F<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
E<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
0.0<br />
0.0<br />
D<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
Zugehörigkeitsgrad<br />
NL NM NS 1.0 PS<br />
PM<br />
PL<br />
ZR<br />
ZR<br />
ZR<br />
0.0<br />
Θ<br />
0.0<br />
Θ'<br />
0.0<br />
x'<br />
Abb. 3.1-31: Bestimmen des Grads der Erfüllung für eine konkrete Situation<br />
28
3.2 Regelungssysteme<br />
3.2.1 Klassische Regelungssysteme<br />
1. Begriffe aus der Regelungstechnik<br />
Aufbau eines Regelkreises<br />
Ein Regelkreis besteht aus einer Regeleinrichtung und einer Regelstrecke<br />
Störgrößen<br />
Führungsgröße<br />
w<br />
Regelabweichung<br />
x w<br />
= x-w<br />
Regler- und<br />
Steuereinrichtung<br />
y<br />
Strecke<br />
Regelgröße<br />
gemessene Regelgröße<br />
Meßeinrichtung<br />
Abb. 3.2-1:<br />
Die Aufgabe eines Regelkreises ist: Der Ausgangswert (Istwert) soll dynamisch<br />
möglichst genau, schnell und schwingungsfrei dem Eingangswert (Sollwert) folgen.<br />
Die Eingangsgröße ist die Führungsgröße des Regelkreises, die Ausgangsgröße<br />
ist die Regelgröße. Zur Anpassung der Regelgröße an die Führungsgröße wird ein<br />
Istwert gemessen und mit dem Sollwert verglichen. Die Differenz ist der<br />
Eingangswert der Regeleinrichtung. Sie wird durch den Regler beeinflußt und am<br />
Reglerausgang der Strecke als Stellgröße zur Verfügung gestellt.<br />
Wesentliches Merkmal einer Regelung im Unterschied zu einer Steuerung ( oder<br />
einem Stellglied) ist ein geschlossener Wirkungskreislauf, der ein automatisches<br />
Nachführen des Istwerts gemäß dem Sollwert ermöglicht.<br />
Kaskadenregelkreise (unterlagerte Regelkreise)<br />
Es liegen hier ineinander geschachtelte Regelkreise vor, die jeweils einen Teil der in<br />
geeigneter Weise aufgesplitteten Regelkreis beinhalten.<br />
29
Regelstrecke<br />
Regler 1<br />
- -<br />
-<br />
Regler 2 Teilstrecke 1<br />
Teilstrecke 2<br />
Abb. 3.2-2: Kaskadenregelkreis<br />
Zustandsregler<br />
Ihnen stehen mehrere, im Idealfall alle Zustandsgrößen der Regelstrecke zur<br />
Verfügung. Hierdurch kann u.a. ein wesentlich verbesserte Regelverhalten erzielt<br />
werden. Der Preis dafür ist der erhöhte Meßaufwand für die Ermittlung der<br />
Zustandsgrößen.<br />
Bsp.: Das sog. "Inverse Pendel"<br />
m<br />
Θ, Θ '<br />
l<br />
i<br />
M<br />
Abb. 3.2-3: Inverses Pendel<br />
Es besteht aus einem fest montierten Motor der bei Aufprägung eines Ankerstroms i<br />
ein Drehmoment M auf das Pendel mit der Masse m ausübt. Das System besitzt 2<br />
Zustandsgrößen: Die Winkelauslegung Θ und die Winkelgeschwindigkeit Θ'.<br />
Die Regelungsaufgabe besteht darin, das Pendel in seiner Ruhelage zu halten bzw.<br />
dorthin zurückzuführen, wenn es durch eine äußere Störung ausgelenkt wird.<br />
Die Regelungsaufgabe besteht darin, das Pendel in seiner Ruhelage zu halten bzw.<br />
dorthin zurückzuführen, wenn es durch eine äußere Störung ausgelenkt wird.<br />
30
2. Beschreibungsmöglichkeiten (für dynamische <strong>Systeme</strong>)<br />
a) Beschreibung im Zeitbereich (in Form einer Differentialgleichung)<br />
Bsp.: Einfaches RC-Netzwerk<br />
u ( t )<br />
e u ( t )<br />
a<br />
Abb. 3.2-4:<br />
Ein Widerstand und ein Kondensator sind in Reihe geschaltet und an beide<br />
Bauelemente eine Eingangsspannung ue ( t) gelegt. Die Ausgangsspannung u ( t)<br />
a<br />
läßt sich als Funktion der Eingangsspannung beschreiben:<br />
u<br />
e<br />
( t) = R ⋅ i( t) + u<br />
a<br />
( t)<br />
du<br />
a<br />
( t)<br />
1<br />
= ⋅<br />
dt C i ( t )<br />
Durch Einsetzen erhält man eine Differentialgleichung erster Ordnung:<br />
R C du t a<br />
( )<br />
⋅ + u<br />
a<br />
( t) = u<br />
e<br />
( t)<br />
dt<br />
Für diese Differentialgleichung ist die Lösung mit den Randbedingungen<br />
u ( e<br />
t < 0)<br />
= 0 und u ( t ≥ 0)<br />
= u :<br />
e 0<br />
− t/<br />
R⋅<br />
C<br />
u ( t) = u ⋅ ( − e )<br />
a<br />
0<br />
1<br />
Vorgegeben wird eine sprunghafte Anregung der Höhe u 0<br />
. Das Verhalten der<br />
Ausgangsgröße ist die Sprungantwort.<br />
u(t)<br />
u e<br />
(t)<br />
u a (t)<br />
t<br />
Abb. 3.2-5:<br />
31
Darstellung des Zeitverhaltens durch die Übergangsfunktion<br />
Die übliche grafische Darstellung eines Regelungsblocks in einem Strukturbild ist<br />
eine skizzierte Abbildung seiner Sprungantwort in einem Rechteck<br />
u e (t)<br />
t<br />
u e (t)<br />
u a (t)<br />
u a (t)<br />
t<br />
Abb. 3.2-6:<br />
Den Verlauf, den die Ausgangsgröße nach einer sprungartigen Eingangsänderung<br />
hat, bezeichnet man als Übergangsfunktion.<br />
Kennzeichnung von Regelstrecken<br />
Es gilt: Die Regelstrecke hat als Eingangsgröße die Stellgliedanordnung y(t) und als<br />
Ausgangsgröße die Regelgröße x(t). Für lineare Übertrager kann man das<br />
Zeitverhalten einer Regelstrecke durch die allgemeine Differentialgleichung<br />
2<br />
n<br />
'''<br />
''<br />
' dx '' d x<br />
Sn<br />
⋅ x + ... + S3 ⋅ x + S2 ⋅ x + S1 ⋅ x + S0 ⋅ x = y mit x = , x = , usw. beschreiben.<br />
2<br />
dt dt<br />
Die höchste Ableitung der beschreibenden Gleichung kennzeichnet die Ordnung der<br />
Regelstrecke. Man spricht von einer Regelstrecke n-ter Ordnung, wenn ihr<br />
Zeitverhalten exakt oder wenigstens mit guter Näherung durch eine<br />
Differentialgleichung n-ter Ordnung dargestellt werden kann.<br />
Weiterhin unterscheidet man<br />
- Regelstrecken mit Ausgleich<br />
- Regelstrecken ohne Ausgleich<br />
Regelstrecken mit Ausgleich: Hier strebt die Regelgröße nach z.B. sprungartiger<br />
Stellgliedsverstellung für t → ∞ einen neuen Beharrungszustand an. Für t → ∞<br />
32
verschwinden alle Ableitungen x’, x ’, ... und der Endwert ist die Größe x = 1 . Der<br />
S0<br />
einfachste Fall ist eine Strecke der Ordnung 0 mit der Gleichung S ⋅ 0<br />
x = y .<br />
Die meisten Regelstrecken zeigen Verzögerungen, d.h. die Ausgangsgröße folgt<br />
nicht unmittelbar einer sprungartigen Eingangsgröße, sondern mit einer zeitlichen<br />
Verzögerung. Die einfachste verzögerte Regelstrecke ist die Regelstrecke 1.<br />
S<br />
Ordnung mit der Gleichung S1 ⋅ x' + S0<br />
⋅ x = y bzw. TS<br />
⋅ x' + x = VS<br />
⋅ y mit T und<br />
S<br />
S = 1 0<br />
V = 1 S<br />
S0<br />
. Die Lösung dieser Gleichung bei einer Sprungfunktion ist bekanntlich:<br />
− t/<br />
T<br />
x = V ⋅ ( 1−<br />
e S<br />
)<br />
S<br />
x<br />
T S<br />
V S<br />
t<br />
Abb. 3.2-7:<br />
Eine Regelstrecke 2. Ordnung wird durch die Differentialgleichung<br />
S ⋅ x''<br />
+ S ⋅ x'<br />
+ S ⋅ x = y<br />
2 1 0<br />
beschrieben. Das ist die bekannte Schwingungsgleichung, die bspw. in der<br />
Mechanik das Verhalten eines Feder-Masse-Systems mit Dämpfung beschreibt. Die<br />
Übergangsfunktion eines solchen Systems zeigt ein oszillatorisches Verhalten<br />
Regelstrecken ohne Ausgleich: Bei einer sprungartigen Änderung der<br />
Eingangsgröße wird die Ausgangsgröße vom vorliegenden Beharrunszustand<br />
weglaufen, ohne wieder einen neuen Beharrungszustand in dem Bereich der<br />
Ausgangsgröße anzunehmen.<br />
b) Beschreibung im Frequenzgangbereich<br />
Führt man aufwendigere Regelstrukturen auf Differentialgleichungen im Zeitbereich<br />
zurück, so sind diese sehr schnell unhandlich und unübersichtlich. Deshalb ist es<br />
günstiger, eine Transformation in den Frequenzbereich vorzunehmen (sog. Laplace-<br />
Transformation). Speist man ein Übertragungsglied mit einer sinusförmigen<br />
Eingangsgröße, so ist das Übertragungsverhalten als Funktion der Frequenz die<br />
j t<br />
Darstellung im Frequenzbereich. Ist bspw. u ( t) = U ⋅ e<br />
ω , dann gilt:<br />
a<br />
0<br />
33
du<br />
a<br />
( t) =<br />
j t<br />
j ⋅ω<br />
⋅ U ⋅<br />
ω<br />
0<br />
e<br />
dt<br />
Wählt man für die Spannung die komplexe Darstellung mit der abkürzenden<br />
Schreibweise jω = p , so ergibt sich für das Beispiel des RC-Netzwerks:<br />
p⋅ T⋅ u ( p) + u ⋅ ( p) = u ( p) mit T=RC)<br />
oder<br />
a a e<br />
u<br />
a<br />
( p) = F( p) ⋅ u<br />
e<br />
( p)<br />
mit F ( p ) = 1<br />
1 + T ⋅ p<br />
Definition des Frequenzgangs<br />
Der Frequenzgang eines Übertragers ist eine Funktion, die das<br />
Amplitudenverhältnis und die Phasenverschiebung in Abhängigkeit von der<br />
Frequenz beschreibt. Ein Übertrager wird durch die allgemeine Differentialgleichung<br />
m<br />
a ⋅ x + ... + a ⋅ x'' + a ⋅ x' + a ⋅ x = e ⋅ x + e ⋅ x ' + ... + e ⋅ x<br />
m<br />
( ) ( n)<br />
2 1 0 a 0 e 1 e n<br />
in seinem Zeitverhalten beschrieben. Ist die Eingangsgröße eine Sinusschwingung<br />
mit der Amplitude x e0 , so kann diese in komplexer Schreibweise in der Form<br />
x = x ⋅ e<br />
e<br />
e0<br />
jwt<br />
dargestellt werden. Im eingeschwungenen Zustand ist die Ausgangsgröße eine<br />
Schwingung gleicher Frequenz, jedoch mit einer Phasenverschiebung .<br />
x = x ⋅ e<br />
a<br />
a0<br />
Dann ist:<br />
j( ωt+<br />
α)<br />
jwt<br />
x '= jω ⋅ x<br />
0<br />
⋅ e<br />
x '= j ⋅ x ⋅ e<br />
e<br />
e<br />
a<br />
ω<br />
jwt<br />
a0<br />
ω 2 a0<br />
ω 3 a0<br />
jwt<br />
x '' = ( jω)<br />
2 ⋅ x<br />
0<br />
⋅ e x '' = ( j ) ⋅ x ⋅ e<br />
e<br />
e<br />
jwt<br />
x<br />
e<br />
''' = ( jω)<br />
3 ⋅ x<br />
e0 ⋅ e x<br />
a<br />
''' = ( j ) ⋅ x ⋅ e<br />
..... .....<br />
( n)<br />
n<br />
jwt<br />
( m)<br />
m<br />
x = ( jω)<br />
⋅ x<br />
0<br />
⋅ e x = ( j ) ⋅ x ⋅ e<br />
e<br />
e<br />
a<br />
a<br />
ω<br />
a0<br />
Durch Einsetzen in die allgemeine Differentialgleichung, die das Zeitverhalten eines<br />
Übertragers beschreibt, ergibt sich:<br />
jwt<br />
jwt<br />
jwt<br />
m<br />
2<br />
j t<br />
n<br />
{ m<br />
( ω) ... ( ω) 1<br />
ω<br />
0} e0 { n<br />
( ω) ...<br />
1<br />
ω<br />
0}<br />
j t<br />
x ⋅ e ( ω + α )<br />
ω<br />
⋅ a ⋅ j + + a ⋅ j + a ⋅ j + a = x ⋅ e e ⋅ j + + e ⋅ j + e<br />
a0 2<br />
Der Frequenzgang F() erhält man, indem man das Verhältnis Ausgangsgröße zu<br />
Eingangsgröße bildet:<br />
34
F( jω)<br />
=<br />
j<br />
x<br />
a0<br />
⋅ e<br />
x ⋅ e<br />
e0<br />
⋅ ( ωt+<br />
α)<br />
jωt<br />
x<br />
a0<br />
jα<br />
= ⋅ e =<br />
x<br />
e0<br />
n<br />
e<br />
n<br />
⋅ ( jω) + ... + e ⋅ jω<br />
+ e<br />
m<br />
a ( jω) + ... + a ⋅ jω<br />
+ a<br />
m<br />
1 0<br />
1 0<br />
Man kann den Frequenzgang unmittelbar aus der gegebenen Differentialgleichung<br />
heraus berechnen, z.B.:<br />
2<br />
T ⋅ x''<br />
+ T ⋅ x'<br />
+ x = y<br />
2<br />
1<br />
2 2<br />
2<br />
x( p)( T ⋅ p + T1 ⋅ p + 1) = y( p)<br />
x( p)<br />
1<br />
F( p)<br />
= =<br />
y( p)<br />
+ T ⋅ p + T ⋅ p<br />
2 2<br />
1<br />
1 2<br />
3. Wichtige lineare Übertragungsglieder der Regelungstechnik<br />
Glied 1. Ordnung<br />
Ein Verzögerungsglied 1. Ordnung (Tiefpaß) ist das im vorstehenden Beispiel<br />
behandelte RC-Netzwerk<br />
Proportionalglied<br />
Wird der Kondensator in das RC-Netzwerk durch einen ohmschen Widerstand<br />
ersetzt, so ergibt sich das Übertragungsverhalten eines Proportionalglieds, d.h.: Die<br />
Ausgangsgröße ist nicht mehr frequenzabhängig und direkt proportional zur<br />
Eingangsgröße. Das Verhältnis zwischen Eingangs- und Ausgangsgröße ist der<br />
Verstärkungsfaktor oder Proportional-Beiwert.<br />
Integralglied<br />
Die Ausgangsgröße ist das Integral der Eingangsgröße über der Zeit. Umgekehrt<br />
könnte man auch sagen: Das Eingangssignal ist die Ableitung (Steigung) des<br />
Ausgangssignals. Ist der Wert der Eingangsgröße 0, so ändert sich der<br />
Ausgangswert des Integrators nicht. Wurde ein konstanter Wert ungleich 0 angelegt,<br />
ändert sich die Ausgangsgröße mit konstanter Steigung (also linear). Vergrößert<br />
man den Eingangswert gleichförmig, so ändert sich der Ausgangswert immer<br />
schneller. In der Elektrotechnik kann damit das Verhalten eines Spannungsabfalls<br />
über einem Kondensator als Funktion seines Ladestroms beschrieben werden. In<br />
der Mechanik ist es bspw. der zurückgelegte Weg eines Körpers als Funktion seiner<br />
geschwindigkeit.<br />
35
P<br />
Symbol Übertragungsfunktion Realisierungsbeispiel<br />
I<br />
D<br />
PT1<br />
PT1<br />
PT2<br />
F( p) =<br />
T p<br />
2 2<br />
V<br />
+ 2DTp<br />
+ 1<br />
36
3.2.2 <strong>Fuzzy</strong>-Regelungssysteme<br />
1. Struktur<br />
Analog zum konventionellen Regler kann ein <strong>Fuzzy</strong>-Controller interpretiert werden.<br />
Es ist ein Übertragungsverhalten mit Eingangsgrößen, die die über den Zustand des<br />
Prozesses bzw. der Regelstrecke zur Verfügung stehenden Informationen<br />
darstellen, sowie die Ausgangsgrößen für den Prozeß.<br />
X 1<br />
Y<br />
1<br />
<strong>Fuzzy</strong>-Controller<br />
...<br />
X n<br />
Y<br />
m<br />
Abb.: <strong>Fuzzy</strong>-Controller mit den Eingangsgrößen X i und der Stellgröße Y j<br />
Von außen betrachtet, zeigt der Regler keinerlei Unschärfe, d.h.: Sowohl Eingangsals<br />
auch Ausgangsgrößen sind scharfe Werte. Die Unschärfe liegt im Innenleben<br />
des Reglers.<br />
Eingangsgrößen<br />
X<br />
...<br />
1<br />
WENN ... UND ...<br />
DANN ...<br />
WENN ... UND ...<br />
DANN ...<br />
WENN ... UND ...<br />
DANN ...<br />
...<br />
...<br />
Stellgröße<br />
Y<br />
X n<br />
<strong>Fuzzy</strong>fizierung Inferenz Defuzzifizierung<br />
Abb.: Logische Struktur eines <strong>Fuzzy</strong>-Controllers<br />
Eingangs- und Stellgrößen sind linguistische Variable und durch <strong>Fuzzy</strong>-Mengen<br />
charakterisiert. Durch Fuzzifizierung werden die scharfen Eingangsgrößen in<br />
unscharfe Größen überführt. Die Inferenzmaschine generiert im 2. Schritt mit Hilfe<br />
des vorgegebenen Regelwerks an den fuzzifizierten Eingangsgrößen eine unscharfe<br />
37
Stellgröße. Diese wird schließlich durch Defuzzufizierung wieder in ein scharfes<br />
Signal zurückverwandelt.<br />
Die Umsetzung der 3 Arbeitsschritte kann in der on line Berechnung der Stellgröße<br />
für die aktuelle Kombination der Eingangsgrößen bestehen. Dazu geht am<br />
folgendermaßen vor:<br />
(1) Bestimmen des Erfüllungsgrads jeder Regel<br />
- Ermitteln des Erfüllungsgrads für die einzelnen Prämissen (WENN-Teile) der<br />
Regeln<br />
- Verknüpfen der einzelnen Erfüllungsgrade über den UND- oder ODER-<br />
Operator (z.B. MIN- bzw. MAX-Operator)<br />
(2) Ermitteln der zugehörigen Stellgrößen-<strong>Fuzzy</strong>-Mengen für alle aktiven Regeln<br />
(3) Ermitteln der resultierenden <strong>Fuzzy</strong>-Menge durch Überladen aller Stellgrößen-<br />
<strong>Fuzzy</strong>-Sets<br />
(4) Ermitteln der scharfen Stellgröße durch Defuzzifizierung<br />
Bsp.: <strong>Fuzzy</strong>-Controller mit den Eingangsgrößen x 1 (= 0.25) und x 2 (= -0.3). 2 Regeln<br />
sind aktiv<br />
R 1 : WENN x 1 = PS UND x 2 = ZR DANN y = PS<br />
- 1<br />
0 1 - 1 0 1<br />
- 1<br />
0<br />
1<br />
R 2 : WENN x 1 = ZR UND x 2 = NS DANN y = ZR<br />
0 1 - 1 0 1 - 1 0<br />
1<br />
x 1 = 0.25 x 2 = -0.3<br />
- 1<br />
1<br />
y (Stellgröße)<br />
Abb.:<br />
38
<strong>Fuzzy</strong>-Regelungssysteme zeigen die gleichen Strukturen wie klassische Regelungssysteme:<br />
Regelbasis<br />
-<br />
Fuzzifizierung<br />
Inferenzmechanismus<br />
Defuzzyfizierung<br />
Strecke<br />
FC<br />
Abb.: Einschleifiger Regelkreis mit <strong>Fuzzy</strong>-Controller<br />
2. <strong>Fuzzy</strong>-Entwurfsschritte<br />
(1) Wahl der Meßgrößen mit den daraus abgeleiteten Größen als Eingangsgrößen<br />
des <strong>Fuzzy</strong>-Controller sowie der Stellgröße als Ausgangsgröße<br />
(2) Festlegung der möglichen Wertebereiche für die Ein- und Ausgangsgrößen<br />
(Skalierung der linguistischen Variablen)<br />
(3) Definition der linguistischen Terme und ihre Zugehörigkeitsfunktionen (<strong>Fuzzy</strong><br />
Sets) für alle linguistischen Variablen<br />
(4) Aufstellen der Regelbasis<br />
(5) Festlegen der Inferenzmaschine (Operatoren, Inferenzmethode, Datentyp,<br />
Defuzzifizierungsmethode)<br />
(6) Simulation des Regelkreises, falls ein Modell der Regelstrecke vorhanden ist.<br />
Das Modell muß nicht ein exaktes Modell sein, sondern kann ebenfalls mit einem<br />
<strong>Fuzzy</strong>-System verbal beschrieben werden.<br />
(7) Optimierung<br />
(8) Stabilitätsanalyse über offline- oder online-Prüfverfahren oder über<br />
mathematische Verfahren<br />
39