4. Fremdgeführte Stromrichter - FB E+I: Home
4. Fremdgeführte Stromrichter - FB E+I: Home
4. Fremdgeführte Stromrichter - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>4.</strong> <strong>Fremdgeführte</strong> <strong>Stromrichter</strong><br />
<strong>Fremdgeführte</strong> <strong>Stromrichter</strong> benötigen eine fremde, nicht zum <strong>Stromrichter</strong> gehörende Wechselspannungsquelle,<br />
die ihnen während der Dauer der Kommutierung die Kommutierungsspannung<br />
zur Verfügung stellt.<br />
<strong>4.</strong>1 Netzgeführte Gleich- und Wechselrichter<br />
Netzgeführte Gleich- und Wechselrichter erfüllen die Grundfunktion des Gleich- und Wechselrichtens<br />
und beziehen ihre Kommutierungsspannung vom Wechsel- bzw. Drehstromnetz, sie<br />
nutzen also die im Netz vorhandenen Spannungen zur Kommutierung. Der mögliche<br />
Kommutierungsbereich ist auf eine Halbperiode beschränkt.<br />
Netzgeführte Gleich- und Wechselrichter werden im Allgemeinen mit Netz-Thyristoren realisiert.<br />
Bei ungesteuerten Gleichrichtern werden Netz-Dioden eingesetzt, die eine nahezu konstante<br />
Gleichspannung liefern. Die Gleichspannung ist abhängig von der Gleichrichterschaltung und der<br />
Netzspannung. Einen geringen Einfluss auf die Gleichspannung hat die Last.<br />
Ungesteuerte <strong>Stromrichter</strong> (Gleichrichter)<br />
Bei der idealen Gleichrichterschaltung treten keine Verluste auf. Es gilt:<br />
2<br />
eff<br />
U<br />
2<br />
P = = = ⋅ + ~<br />
Misch P PNetz<br />
Ud<br />
Id<br />
mit U~eff<br />
= Uν<br />
(<strong>4.</strong>1)<br />
R<br />
L<br />
Bezieht man nun den Wechselwert der Mischspannung U ~eff auf den Gleichwert der Mischspannung<br />
U d am Verbraucher R Last , so erhält man die Welligkeit w.<br />
U<br />
w =<br />
~eff<br />
(<strong>4.</strong>2)<br />
Ud<br />
I Netz I<br />
I d<br />
W<br />
W<br />
Idealer<br />
U Netz U U d R Last<br />
<strong>Stromrichter</strong><br />
∑ ∞<br />
= ν<br />
1<br />
P Netz P<br />
P Misch<br />
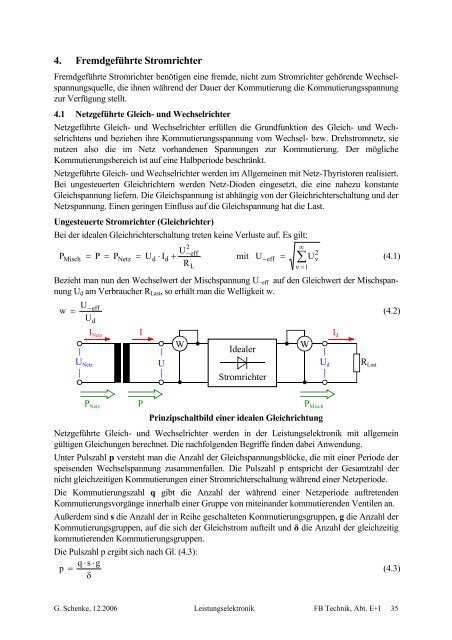
Prinzipschaltbild einer idealen Gleichrichtung<br />
Netzgeführte Gleich- und Wechselrichter werden in der Leistungselektronik mit allgemein<br />
gültigen Gleichungen berechnet. Die nachfolgenden Begriffe finden dabei Anwendung.<br />
Unter Pulszahl p versteht man die Anzahl der Gleichspannungsblöcke, die mit einer Periode der<br />
speisenden Wechselspannung zusammenfallen. Die Pulszahl p entspricht der Gesamtzahl der<br />
nicht gleichzeitigen Kommutierungen einer <strong>Stromrichter</strong>schaltung während einer Netzperiode.<br />
Die Kommutierungszahl q gibt die Anzahl der während einer Netzperiode auftretenden<br />
Kommutierungsvorgänge innerhalb einer Gruppe von miteinander kommutierenden Ventilen an.<br />
Außerdem sind s die Anzahl der in Reihe geschalteten Kommutierungsgruppen, g die Anzahl der<br />
Kommutierungsgruppen, auf die sich der Gleichstrom aufteilt und δ die Anzahl der gleichzeitig<br />
kommutierenden Kommutierungsgruppen.<br />
Die Pulszahl p ergibt sich nach Gl. (<strong>4.</strong>3):<br />
q ⋅s<br />
⋅ g<br />
p = (<strong>4.</strong>3)<br />
δ<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 35
Einpuls-Mittelpunktschaltung (M1)<br />
Die Einpuls-Mittelpunktschaltung wird auch als Einweggleichrichter-Schaltung bezeichnet. In der<br />
Leistungselektronik hat sie wegen ihrer ungünstigen Werte nur eine geringe Bedeutung.<br />
I Netz<br />
1 : 1<br />
I<br />
I d<br />
U Netz<br />
U U d R Last<br />
M1-Schaltung und deren<br />
Spannungsverläufe<br />
û<br />
u d<br />
-û<br />
U = û 2<br />
U d = û π<br />
T<br />
t<br />
Für die M1-Schaltung gelten nachfolgende Werte:<br />
p = 1<br />
P<br />
2<br />
U<br />
=<br />
2 ⋅ R<br />
Last<br />
q = 1<br />
s = 1<br />
U<br />
d<br />
û<br />
= =<br />
π<br />
g = 1<br />
2 ⋅ U<br />
π<br />
δ = 1<br />
w = 121%<br />
Bei der M1-Schaltung ist der Gleichstrom I d gleich dem Durchlassstrom der Diode. Bei reiner<br />
Widerstandslast gilt:<br />
î<br />
Id<br />
= IFAV<br />
=<br />
(<strong>4.</strong>5)<br />
π<br />
Der Effektivwert des sekundären Außenleiterstromes I ist gleich dem Effektivwert der Diode. Bei<br />
reiner Widerstandslast gilt:<br />
î<br />
I = IFRMS =<br />
(<strong>4.</strong>6)<br />
2<br />
Der Eingangsstrom eines Einpulsstromrichters ist ein Mischstrom. Da ein Transformator aber nur<br />
Wechselströme überträgt, fließt der Gleichstromanteil lediglich durch die Sekundärwicklung, der<br />
Transformator wird hierdurch vormagnetisiert. Mit ü = 1 gilt:<br />
INetz<br />
= w ⋅ Id<br />
= 1,21⋅<br />
Id<br />
(<strong>4.</strong>7)<br />
Für die sekundäre Scheinleistung S und die primäre Netzleistung S Netz gelten bei reiner Widerstandslast:<br />
π ⋅ U I<br />
S U I<br />
d π ⋅<br />
= ⋅ = ⋅<br />
d<br />
= 3,49 ⋅ Pd<br />
2 2<br />
(<strong>4.</strong>8)<br />
ü ⋅ π ⋅ U w I<br />
S U I<br />
d ⋅ d<br />
Netz = Netz ⋅ Netz = ⋅ = 2,69 ⋅ Pd<br />
2 ü<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 36<br />
(<strong>4.</strong>4)
Die Bauleistung bzw. Typleistung S T des Transformators entspricht dem Mittelwert von Primärund<br />
Sekundärleistung.<br />
S = 0,5⋅<br />
(S + S) = 3,09 ⋅ P<br />
(<strong>4.</strong>9)<br />
T<br />
Netz<br />
d<br />
Zweipuls-Mittelpunktschaltung (M2)<br />
Grundlage der Mittelpunktschaltung ist ein <strong>Stromrichter</strong>transformator mit sekundärseitiger<br />
Mittelanzapfung. Die Sekundärseite wird hier zweckmäßig als zweisträngige Wicklung mit den<br />
Strangspannungen U Strang1 und U Strang2 bezeichnet.<br />
2 ⋅ ûStrang<br />
û 2 ⋅ 2 ⋅ UStrang<br />
2<br />
Ud<br />
= = =<br />
= ⋅ U<br />
(<strong>4.</strong>10)<br />
π π π π<br />
I Netz<br />
I<br />
I d<br />
1 : 1<br />
U Strang2<br />
U<br />
U Strang1 U d R Last<br />
U Netz<br />
û<br />
u d<br />
-û<br />
û Strang<br />
U d = û π<br />
T<br />
t<br />
u<br />
M2-Schaltung und deren Spannungsverläufe<br />
p = 2 q = 2 s = 1 g = 1 δ = 1 w = 48,3 % (<strong>4.</strong>11)<br />
Zweipuls-Brückenschaltung (B2)<br />
Die B2-Schaltung wird auch einphasige Brückenschaltung oder auch Graetzschaltung genannt.<br />
Neben den Vorteilen ist als geringfügiger Nachteil die doppelte Ventildurchlassspannung zu<br />
nennen, da jeweils zwei den Gleichstrom führende Ventile in Reihe geschaltet sind. Die B2-<br />
Schaltung wird in der Praxis häufig eingesetzt.<br />
Der ideale arithmetische Mittelwert der Gleichspannung U d beträgt:<br />
U d<br />
2 ⋅ û 2 ⋅ 2<br />
= = ⋅ U = 0,9 ⋅ U<br />
(<strong>4.</strong>12)<br />
π π<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 37
I d<br />
I Netz<br />
1 : 1<br />
I<br />
U Netz<br />
U U d R Last<br />
û<br />
u d<br />
-û<br />
U d = 2û π<br />
T<br />
t<br />
B2-Schaltung und deren Spannungsverläufe<br />
Für die B2-Schaltung gelten nachfolgende Werte:<br />
p = 2 q = 2 s = 2 g = 1 δ = 2 w = 48,3 % (<strong>4.</strong>13)<br />
Der Gleichstrom I d fließt bei der B2-Schaltung abwechselnd über die beiden Schaltungszweige.<br />
Der mittlere Ventildurchlassstrom I FAV und der Effektivwert des Ventilstromes I FRMS können bei<br />
ohmscher Belastung nachfolgend aus dem Gleichstrom I d berechnet werden.<br />
π<br />
IFAV<br />
= 0,5⋅<br />
Id<br />
IFRMS<br />
= ⋅ Id<br />
= 0,785⋅<br />
Id<br />
(<strong>4.</strong>14)<br />
4<br />
Mit ü = 1 beim Transformator ist I Netz = I und es gilt:<br />
INetz = 1,11⋅<br />
I d<br />
(<strong>4.</strong>15)<br />
Die Scheinleistungen der Sekundärseite S und der Primärseite S Netz sind bei verlustfreiem<br />
Transformator gleich.<br />
S = SNetz<br />
= U ⋅ I = 1,11⋅<br />
Ud<br />
⋅1,11⋅<br />
Id<br />
= 1,23⋅<br />
Pd<br />
(<strong>4.</strong>16)<br />
Für die Transformatorbauleistung S T gilt:<br />
ST<br />
= 0,5⋅<br />
(SNetz<br />
+ S) = 1,23⋅<br />
Pd<br />
(<strong>4.</strong>17)<br />
Die B2-Schaltung hat von allen Gleichrichterschaltungen mit Wechselstromanschluss die<br />
günstigste Transformatorbauleistung.<br />
In der Leistungselektronik sind ohmsch-induktive Verbraucher vorherrschend. Wird der Lastwiderstand<br />
im Gleichstromkreis durch einen ohmsch-induktiven Verbraucher ersetzt, so geht der<br />
Ventilstrom von der Sinushalbwellenform bei zunehmender Induktivität in eine Rechteckform<br />
über.<br />
Die Spannungswelligkeit beträgt weiter w = 48,3%. Die Stromwelligkeit sinkt, bedingt durch die<br />
Induktivität L d , auf w = 0 bei L d → ∞. In der Praxis ist die Stromwelligkeit auch bei<br />
handelsüblichen Induktivitäten vernachlässigbar. Im Labor verwenden wir bei I d ≈ 5 A für<br />
vernachlässigbare Welligkeit L d = 480 mH.<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 38
Für rechteckförmigen Stromverlauf gilt:<br />
I<br />
I = I<br />
I<br />
d<br />
d<br />
FRMS =<br />
S = U ⋅ I = 1,11⋅<br />
Pd<br />
(<strong>4.</strong>18)<br />
2<br />
u d<br />
û<br />
t<br />
I d<br />
i<br />
t<br />
Zeitlicher Verlauf der Gleichspannung u d und<br />
des rechteckförmigen Eingangswechselstromes i<br />
Dreipuls-Mittelpunktschaltung (M3)<br />
<strong>Stromrichter</strong> für große Leistungen werden für den Anschluss an das Drehstromnetz ausgelegt. Die<br />
einfachste Drehstrom-Gleichrichterschaltung ist die M3-Schaltung, die auch Drehstrom-Sternschaltung<br />
genannt wird.<br />
L1<br />
U Netz<br />
I Netz<br />
-I d<br />
1 : 1<br />
I<br />
L1<br />
L2<br />
L2<br />
L3<br />
L3<br />
U d<br />
I F<br />
I d<br />
L Last<br />
R Last<br />
M3-Schaltung mit<br />
ohmsch-induktiver Last<br />
U Strang<br />
N<br />
Die Gleichspannung sinkt nicht auf Null ab, weil alle 120° ein neuer Kommutierungsvorgang<br />
erfolgt. Der Zeitpunkt der Spannungsgleichheit, bei dem die Kommutierung erfolgt, heißt auch<br />
natürlicher Zündzeitpunkt. Der arithmetische Mittelwert der Gleichspannung berechnet sich zu:<br />
U<br />
T/6<br />
3<br />
3<br />
π 3 3<br />
= ⋅ ûStrang<br />
cos t dt ûStrang<br />
sin = ⋅ ⋅ 2 ⋅ UStrang<br />
1,17 UStrang<br />
T<br />
∫ ⋅ ω ⋅ = ⋅ ⋅<br />
(<strong>4.</strong>19)<br />
π<br />
3 π 2<br />
d =<br />
-T/6<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 39
u<br />
û Strang<br />
u L1N<br />
-û Strang<br />
u L2N u L3N<br />
t<br />
û Strang<br />
u d<br />
T<br />
t<br />
t<br />
u AK<br />
U RRM<br />
u L2N - u L3N<br />
u L2N - u L1N<br />
Zeitlicher Verlauf der Strangspannungen u L1N , u L2N und u L3N , der Gleichspannung u d<br />
und einer Ventilspannung u AK<br />
Der Scheitelwert der Sperrspannung berechnet sich:<br />
U = 3 ⋅ û = 3 ⋅ 2 ⋅ U = 2 ⋅ U<br />
(<strong>4.</strong>20)<br />
RRM<br />
Strang<br />
Strang<br />
Für die M3-Schaltung gelten nachfolgende Werte:<br />
p = 3 q = 3 s = 1 g = 1 δ = 1 w = 18,3 % (<strong>4.</strong>21)<br />
Für ideal glatten Gleichstrom (L → ∞) berechnen sich der Mittelwert der Ventilströme I FAV und<br />
der Effektivwert der Ventilströme I FRMS zu:<br />
I<br />
FAV<br />
1<br />
1<br />
= ⋅ Id<br />
IFRMS<br />
= ⋅ Id<br />
(<strong>4.</strong>22)<br />
3<br />
3<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 40
Für M3-Schaltungen eignen sich besonders Transformatoren mit den Schaltgruppen Dy, Dz und<br />
Yz. Aus der sekundären Scheinleistung S<br />
S = 3 ⋅ U ⋅ I = 3 ⋅1,48 U ⋅ 0,577 I = 1,48 P<br />
(<strong>4.</strong>23)<br />
d<br />
d<br />
und der Scheinleistung des Netzes S Netz<br />
S = 3 ⋅ U ⋅ I = 3 ⋅1,48 U ⋅ 0,47 I = 1,21P<br />
(<strong>4.</strong>24)<br />
Netz<br />
d<br />
d<br />
kann die Bauleistung (Typleistung) des <strong>Stromrichter</strong>-Transformators S T berechnet werden:<br />
S = 0,5⋅<br />
(S + S) = 1,35 P<br />
(<strong>4.</strong>25)<br />
T<br />
Netz<br />
d<br />
d<br />
d<br />
i<br />
I d<br />
i W1<br />
2/3 I d<br />
3<br />
T<br />
t<br />
t<br />
1/3 I<br />
- d<br />
3<br />
i W2<br />
1/3 I<br />
- d<br />
3<br />
I d<br />
3<br />
2/3 I d<br />
3<br />
t<br />
i Netz<br />
t<br />
I<br />
- d<br />
3<br />
Die Wicklungsströme i W1 und i W2 ergeben den Netzstrom i Netz = i W1 – i W2 .<br />
Stromverläufe bei der M3-Schaltung mit Dy-Transformator mit glattem Gleichstrom<br />
Sechspuls-Brückenschaltung (B6)<br />
Die B6-Schaltung, auch Drehstrombrückenschaltung genannt, ist hinsichtlich Welligkeit und<br />
Transformatortypenleistung eine vorteilhafte Gleichrichterschaltung. Bei großen Leistungen ist<br />
sie die dominierende Schaltung.<br />
L1<br />
L2<br />
U Netz<br />
I Netz<br />
1 : 1<br />
I<br />
L1<br />
U<br />
L2<br />
U d<br />
R Last<br />
I F<br />
I d<br />
L Last<br />
B6-Schaltung mit ohmschinduktiver<br />
Last<br />
L3<br />
L3<br />
N<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 41
Vom Verständnis her kann die B6-Schaltung als Reihenschaltung einer M3-Kathoden- und einer<br />
M3-Anodenschaltung gesehen werden. Für weitere Betrachtungen wird idealer Gleichstrom<br />
vorausgesetzt.<br />
Für die B6-Schaltung gelten nachfolgende Werte:<br />
p = 6 q = 3 s = 2 g = 1 δ = 1 w = 4,2 % (<strong>4.</strong>26)<br />
Der arithmetische Mittelwert der Gleichspannung U d berechnet sich zu:<br />
U<br />
T/12<br />
6<br />
3<br />
π 3⋅<br />
2<br />
= ⋅ ûStrang<br />
cos t dt 2 ⋅ ûStrang<br />
⋅sin<br />
= ⋅ U 1,35 U<br />
T<br />
∫ ⋅ ω ⋅ = ⋅<br />
(<strong>4.</strong>27)<br />
π<br />
6 π<br />
d =<br />
-T/12<br />
u (M3K)<br />
u L1N u L2N u L3N<br />
t<br />
T<br />
T<br />
u L1N u L2N u L3N<br />
u (M3A)<br />
t<br />
u L2N u L3N u L1N u L2N u L3N u L1N u L2N<br />
u (B6)<br />
u (B6) = u (M3K) - u (M3A)<br />
u L1N - u L2N<br />
u L1N - u L3N<br />
u L2N - u L3N<br />
u L2N - u L1N<br />
u L3N - u L1N<br />
u L3N - u L2N<br />
t<br />
Gleichspannungsbildung bei der B6-Schaltung<br />
Da je Kommutierungsgruppe drei Kommutierungszweige (q = 3) vorhanden sind, reduzieren sich<br />
der Mittelwert der Ventilströme I FAV und der Effektivwert der Ventilströme I FRMS bei vollkommen<br />
glatten Gleichstrom auf:<br />
1<br />
1<br />
IFAV<br />
= ⋅ Id<br />
IFRMS<br />
= ⋅ Id<br />
(<strong>4.</strong>28)<br />
3<br />
3<br />
Für den Wechselstrom I der Sekundärwicklung gilt:<br />
2<br />
I = ⋅ I d<br />
(<strong>4.</strong>29)<br />
3<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 42
i L1<br />
T<br />
I d<br />
t<br />
-I d<br />
Außenleiterstrom I bei der B6-Schaltung<br />
Für die Scheinleistungen der B6-Schaltung gilt:<br />
S = S = S = 3 ⋅ U ⋅ I = 3 ⋅ 0,74 U ⋅ 0,816 I = 1,05 P<br />
(<strong>4.</strong>30)<br />
Netz<br />
T<br />
d<br />
Vollgesteuerte Zweipuls-Brückenschaltung (B2-Schaltung)<br />
Bei vollgesteuerten <strong>Stromrichter</strong>n sind alle Ventile steuerbar. Es tritt eine Gleichspannung auf, die<br />
von der Netzspannung, der Lastart und vom Steuerwinkel α abhängig ist.<br />
I d<br />
d<br />
d<br />
I Netz<br />
1 : 1<br />
I<br />
V1<br />
V3<br />
Vollgesteuerte B2-Schaltung<br />
U Netz<br />
U U d R Last<br />
V4<br />
V2<br />
U dα<br />
U d0<br />
1,0<br />
0,8<br />
0,6<br />
0,4<br />
0,2<br />
0,0<br />
-0,2<br />
-0,4<br />
-0,6<br />
-0,8<br />
-1,0<br />
0 30 60 90 120 150 180<br />
α / °<br />
Lastabhängige Steuerkennlinien<br />
der vollgesteuerten<br />
B2-Schaltung<br />
Mit Gl. (<strong>4.</strong>12) wird die Gleichspannung U dα für ohmsche Last in Abhängigkeit vom Steuerwinkel<br />
α berechnet.<br />
1<br />
2<br />
Ud α = ⋅ Ud0<br />
⋅ ( 1+<br />
cosα) = ⋅ U ⋅ ( 1+<br />
cosα)<br />
(<strong>4.</strong>30)<br />
2<br />
π<br />
Für induktive Lasten gilt:<br />
8<br />
d α = Ud<br />
⋅ cosα<br />
= ⋅ U ⋅ cosα<br />
(<strong>4.</strong>31)<br />
π<br />
U 0<br />
Induktive Last<br />
Aktive Last<br />
Widerstandslast<br />
Induktive Last<br />
Wechselrichterbetrieb<br />
Gleichrichterbetrieb<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 43
Für α > 90° muss die Last aktiven Charakter haben, wenn durch den vorliegenden Wechselrichterbetrieb<br />
Energie ins Netz gespeist werden soll.<br />
û<br />
û<br />
u<br />
u<br />
ωt<br />
ωt<br />
-û<br />
-û<br />
i G<br />
V1,V2<br />
ωt<br />
i G<br />
V1,V2<br />
ωt<br />
i G<br />
V3,V4<br />
û<br />
ωt<br />
i G<br />
V3,V4<br />
û<br />
ωt<br />
u d<br />
u d<br />
α<br />
α<br />
α<br />
α<br />
ωt<br />
ωt<br />
i d<br />
u AK<br />
û<br />
û<br />
2<br />
ωt<br />
i d<br />
u AK<br />
û<br />
I d<br />
ωt<br />
u AK(V1)<br />
ωt<br />
u AK(V1)<br />
ωt<br />
-û<br />
-û<br />
π<br />
π<br />
3π<br />
2π<br />
π<br />
π<br />
3π<br />
2π<br />
2<br />
2<br />
2<br />
2<br />
ohmsche Last<br />
ohmsch-induktive Last (L →∞)<br />
Zeitlicher Verlauf der Eingangswechselspannung u, der Gateströme i G ,<br />
der Ausgangsgleichspannung u dα , des Laststromes i d und der Ventilspannung u AK(V1)<br />
bei der B2-Schaltung mit dem Steuerwinkel α = 90°<br />
Vollgesteuerte Dreipuls-Mittelpunktschaltung (M3-Schaltung)<br />
Ein Steuersatz zur Zündung der Thyristoren einer M3-Schaltung muss so ausgeführt sein, dass er<br />
drei zeitlich um 120°el versetzte Impulse je Periode abgeben kann.<br />
I Netz 1 : 1 I<br />
L1<br />
L1<br />
V1<br />
U<br />
L2<br />
L3<br />
U Netz<br />
L2<br />
L3<br />
U Strang<br />
I T<br />
I d<br />
R Last<br />
U dα<br />
L Last<br />
V2<br />
V3<br />
Vollgesteuerte M3-Schaltung<br />
mit SR-Transformator<br />
N<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 44
Aufgrund der Kommutierungszeit und der Freiwerdezeit der Ventile wird der max. theoretische<br />
Steuerwinkel bei aktiven Lasten auf etwa 150° beschränkt.<br />
u<br />
û Strang<br />
u L1N<br />
u L2N u L3N<br />
210°<br />
30°<br />
ωt<br />
-û Strang<br />
α = 0° α = 180°<br />
theoretischer<br />
Steuerbereich<br />
α = 0° α = 150°<br />
praktischer<br />
Steuerbereich<br />
Steuerbereich der M3-Schaltung<br />
Mit Gl. (<strong>4.</strong>19) wird die Gleichspannung U dα für den nicht lückenden Betrieb in Abhängigkeit vom<br />
Steuerwinkel α berechnet.<br />
3<br />
Ud α = Ud0<br />
⋅ cosα<br />
= ⋅ U ⋅ cosα<br />
(<strong>4.</strong>32)<br />
2 ⋅ π<br />
Bei Widerstandslast liegt bei α ≥ 30° bereits Lückbetrieb vor. Die Berechnung erfolgt dann nach<br />
Gl. (<strong>4.</strong>33).<br />
1<br />
Ud α = ⋅ Ud0<br />
⋅[ 1+<br />
cos( α + 30°<br />
)]<br />
(<strong>4.</strong>33)<br />
3<br />
U dα<br />
U d0<br />
1,0<br />
0,8<br />
0,6<br />
0,4<br />
0,2<br />
0,0<br />
-0,2<br />
-0,4<br />
-0,6<br />
-0,8<br />
Induktive Last<br />
Aktive Last<br />
Widerstandslast<br />
Induktive Last<br />
Wechselrichterbetrieb<br />
Gleichrichterbetrieb<br />
natürlicher Kommutierungswinkelpunkt<br />
Lastabhängige<br />
Steuerkennlinien der<br />
M3-Schaltung<br />
-1,0<br />
0 30 60 90 120 150 180<br />
α / °<br />
Wird die Spannungswinkelfläche im Bereich negativer Spannung größer als im Bereich positiver<br />
Spannung, dann ist U dα negativ und es kommt zum Wechselrichterbetrieb. Wechselrichterbetrieb<br />
ist nur möglich, wenn die Last Energie abgeben kann (│U Last │ > │U dα │).<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 45
û Strang<br />
û Strang<br />
u L1N u L1N<br />
u<br />
u<br />
ωt<br />
ωt<br />
-û Strang<br />
-û<br />
120°<br />
120°<br />
Strang<br />
u dα u dα<br />
ωt<br />
ωt<br />
α = 0° α = 90° 60°<br />
α = 0° α = 90°<br />
i d V3 V1 V2<br />
i d V3 V1 V2<br />
ωt<br />
ωt<br />
u L1L2 u L2L3 u L3L1 u L1L2 u L2L3 u L3L1<br />
û<br />
û<br />
u AK u AK<br />
-û<br />
u L2L1<br />
u L2N u L3N<br />
u L3L2<br />
u L1L3<br />
ωt<br />
-û<br />
u L2L1<br />
u L2N u L3N<br />
u L3L2<br />
u L1L3<br />
ohmsche Last<br />
induktive Last<br />
Zeitlicher Verlauf der Eingangswechselspannung u, der Ausgangsgleichspannung u dα ,<br />
des Laststromes i d und der Ventilspannung u AK(V1)<br />
bei der M3-Schaltung mit dem Steuerwinkel α = 90°<br />
Vollgesteuerte Drehstrombrückenschaltung (B6-Schaltung)<br />
Die Kennwerte der vollgesteuerten B6-Schaltung sind sehr günstig; sie wird darum häufig<br />
eingesetzt.<br />
I d<br />
ωt<br />
L1<br />
L2<br />
U Netz<br />
I Netz<br />
1 : 1<br />
I<br />
L1<br />
U<br />
L2<br />
V1 V3 V5<br />
I T<br />
U dα<br />
R Last<br />
Vollgesteuerte<br />
B6-Schaltung mit<br />
SR-Transformator<br />
L3<br />
L3<br />
V4 V6 V2<br />
N<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 46
Für die Ausgangsgleichspannung findet alle 60° eine Kommutierung statt und der natürliche<br />
Kommutierungswinkel liegt bei 60° bezogen auf den positiven Nulldurchgang der verketteten<br />
Spannung.<br />
Bis zum Zündwinkel α = 60° tritt auch bei Widerstandslast kein Lückbetrieb auf. Für 0° ≤ α ≤ 60°<br />
gilt allgemein:<br />
3⋅<br />
2<br />
Ud α = Ud0<br />
⋅ cosα<br />
= ⋅ U ⋅ cosα<br />
(<strong>4.</strong>34)<br />
π<br />
Bei induktiver Last gilt Gl. (<strong>4.</strong>34) für 0° ≤ α ≤ 90° und bei aktiver Last theoretisch sogar für<br />
0° ≤ α ≤ 180°. Bei Widerstandslast liegt bei 60° ≤ α ≤ 120° Lückbetrieb vor. Die Berechnung<br />
erfolgt dann nach Gl. (<strong>4.</strong>35).<br />
1 ⎡ 2<br />
⎤<br />
Ud α = ⋅ Ud0<br />
⋅ ⎢1<br />
+ ⋅ cos( α + 30°<br />
) ⎥⎦ (<strong>4.</strong>35)<br />
2 ⎣ 3<br />
Für 120° ≤ α ≤ 180° ist bei Widerstandslast die Ausgangsspannung U dα = 0 V.<br />
U dα<br />
U d0<br />
1,0<br />
0,8<br />
0,6<br />
0,4<br />
0,2<br />
Induktive Last Widerstandslast<br />
0,0<br />
Induktive Last<br />
-0,2<br />
Aktive Last<br />
-0,4<br />
-0,6<br />
-0,8<br />
-1,0<br />
0 30 60 90 120 150 180<br />
α / °<br />
u Strang<br />
û<br />
u dα<br />
-û<br />
u L1N<br />
Wechselrichterbetrieb<br />
Gleichrichterbetrieb<br />
Lastabhängige<br />
Steuerkennlinie des<br />
vollgesteuerten B6-<br />
<strong>Stromrichter</strong>s<br />
Die B6-Schaltung erfordert alle 60°<br />
einen Zündimpuls als Langzeitimpuls<br />
t i > T/6. Vorzugsweise werden<br />
jedoch Ansteuerverfahren mit kurzen<br />
Doppelimpulsen je Thyristor,<br />
die aus dem Hauptimpuls und 60°<br />
später dem Folgeimpuls bestehen.<br />
Der Folgeimpuls wird zum Anfahren<br />
und bei Lückbetrieb zwingend<br />
notwendig.<br />
Verlauf der Strangspannungen<br />
und der Ausgangsgleichspannung<br />
U dα<br />
bei Widerstandslast für<br />
α = 0° und α = 75°<br />
u L3L2 u L1L3<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 47<br />
u L2L1<br />
u L2N u L3N<br />
ωt<br />
u L1L2 u L2L3 u L3L1<br />
α = 0°<br />
α = 75°<br />
ωt
Stromleitfähigkeit bei α = 0°<br />
V5 V1 V3 V5 V1<br />
V6 V2 V4 V6<br />
i G<br />
H1 F1 H3 F3 H5 F5 H1<br />
i G<br />
F6 H2 F2 H4 F4 H6 F6<br />
H1 - H6 = Hauptimpuls<br />
F1 - F6 = Folgeimpuls<br />
ωt<br />
ωt<br />
ωt<br />
α = 0°<br />
Stromleitfähigkeit bei α = 75°<br />
H1 - H6 = Hauptimpuls<br />
F1 - F6 = Folgeimpuls<br />
V5<br />
V4<br />
V5<br />
V6<br />
V1<br />
V6<br />
V1<br />
V2<br />
V3<br />
V2<br />
V3<br />
V4<br />
V5<br />
V4<br />
V5<br />
V6<br />
F5 H1 F1 H3 F3 H5 F5<br />
i G<br />
H6 F6 H2 F2 H4 F4 H6<br />
i G<br />
α = 75°<br />
ωt<br />
ωt<br />
ωt<br />
Stromflusswinkel und Zündimpulse<br />
des B6-<strong>Stromrichter</strong>s mit<br />
Widerstandslast bei α = 0°<br />
Stromflusswinkel und Zündimpulse<br />
des B6-<strong>Stromrichter</strong>s mit<br />
Widerstandslast bei α = 75°<br />
Zweipulsige, halbgesteuerte Brückenschaltung (B2H-Schaltung)<br />
Entsprechend der Steuerkennlinie (Gl. <strong>4.</strong>36) können mit den halbgesteuerten Schaltungen nur<br />
positive Ausgangsgleichspannungen erreicht werden.<br />
1<br />
Ud α = ⋅ Ud0<br />
⋅[ 1+<br />
cosα]<br />
(<strong>4.</strong>36)<br />
2<br />
Vorteilhaft sind gegenüber vollgesteuerten Schaltungen eine einfachere Ansteuerschaltung und<br />
der geringere Blindleistungsbedarf.<br />
I d<br />
L1<br />
I<br />
L K<br />
V1 V2<br />
U U dα<br />
L d<br />
N<br />
I T2<br />
V10 V20<br />
M<br />
LFeld<br />
Symmetrische halbgesteuerte<br />
Zweipulsbrücke mit kathodenseitiger<br />
Zusammenfassung der steuerbaren<br />
Ventile (B2HK-Schaltung)<br />
I d<br />
I F10<br />
Unsymmetrische halbgesteuerte<br />
Zweipulsbrücke<br />
(Zweigpaargesteuerte Brücke)<br />
(B2HZ-Schaltung)<br />
L1<br />
I<br />
V10 V1<br />
U U dα<br />
L d<br />
N<br />
L K<br />
I T1<br />
V20 V2<br />
M<br />
LFeld<br />
I F20<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 48
Sechspulsige, halbgesteuerte Brückenschaltung (B6H-Schaltung)<br />
Die halbgesteuerte Drehstrombrückenschaltung wird im allgemeinen aus einer M3-Kathodenschaltung<br />
als gesteuerter und einer M3-Anodenschaltung als ungesteuerter Teil-<strong>Stromrichter</strong><br />
gebildet. Sie kann nur positive Ausgangsgleichspannungen entsprechend der Steuerkennlinie<br />
erreichen.<br />
1<br />
3<br />
Ud α = ⋅ Ud0<br />
⋅[ 1+<br />
cosα] = ⋅ U ⋅[ 1+<br />
cosα]<br />
(<strong>4.</strong>37)<br />
2<br />
2 ⋅ π<br />
I d<br />
L1<br />
U<br />
L2<br />
L3<br />
I<br />
L K1<br />
L K2<br />
L K3<br />
V1 V3 V5<br />
I T3<br />
I F60<br />
V70<br />
U dα<br />
R Last<br />
L Last<br />
Halbgesteuerter<br />
B6-<strong>Stromrichter</strong><br />
mit Freilaufdiode<br />
V40 V60 V20<br />
Bei dieser Schaltung liegt ein sechspulsiges Verhalten nur für Steuerwinkel α < 60° vor,<br />
ansonsten liegt eine Dreipulsigkeit der Gleichspannung vor.<br />
Das "Kippen" in der Nähe von α = 180° verhindert die zusätzliche Freilaufdiode. Prinzipiell bildet<br />
bei der B6H-Schaltung jedes Zweigpaar (z.B. V3, V60) einen Freilaufkreis, der bei α > 60° in<br />
Funktion tritt.<br />
α = 0° 30° 60° 90° 120° 150°<br />
u dα<br />
M3K<br />
û Strang<br />
t<br />
Spannungsverlauf<br />
des vollgesteuerten<br />
M3K-<strong>Stromrichter</strong>s<br />
u L1N<br />
u L2N<br />
u L3N<br />
-û Strang<br />
u d<br />
M3A<br />
û<br />
u dα<br />
B6H<br />
û Strang<br />
-û Strang<br />
u L1N u L2N u L3N<br />
p = 6 p = 3<br />
t<br />
Schaltverhalten des B6H-<strong>Stromrichter</strong>s<br />
t<br />
Spannungsverlauf<br />
des ungesteuerten<br />
M3A-<strong>Stromrichter</strong>s<br />
Ausgangsgleichspannung<br />
des<br />
B6H-<strong>Stromrichter</strong>s<br />
(u dαM3K - u dαM3A )<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 49
Belastungskennlinien von netzgeführten <strong>Stromrichter</strong>n<br />
Bisher wurden die <strong>Stromrichter</strong> als ideale Spannungsquellen angesehen, bei denen die<br />
Ausgangsgleichspannung belastungsunabhängig ist. Entgegen der bisherigen Bezeichnungsweise<br />
ist der ideale (mathematische) Spannungswert mit U diα und der reale mit U dα gekennzeichnet. Es<br />
gilt:<br />
Udα = Udiα<br />
- UT<br />
- Dx<br />
- Dr<br />
(<strong>4.</strong>38)<br />
Dabei sind U T die wirksame Ventilspannung - bei Brückenschaltungen sind zwei Ventile in Reihe<br />
geschaltet -, D x die induktive Gleichspannungsänderung und D r die ohmsche Gleichspannungsänderung.<br />
U di0<br />
U T<br />
D r<br />
U<br />
D x<br />
dα<br />
U d0<br />
α = 0°<br />
U di60<br />
U d60<br />
∆U dα<br />
R i = ∆ U dα<br />
∆I d<br />
∆I d<br />
α = 60°<br />
0<br />
I d<br />
U d90<br />
α = 90°<br />
U di120<br />
U d120<br />
Belastungskennlinien eines <strong>Stromrichter</strong>s<br />
α = 120°<br />
An den ohmschen Widerständen im Kommutierungskreis tritt die ohmsche Gleichspannungsänderung<br />
D r auf, die gegenüber der induktiven Gleichspannungsänderung D x , die an den<br />
Induktivitäten L k im Kommutierungskreis auftritt, oft vernachlässigbar ist. D r und D x sind linear<br />
vom Strom abhängig.<br />
An den Kommutierungsinduktivitäten geht die schraffierte Spannungszeitfläche verloren.<br />
1<br />
⋅ uk<br />
⋅ dt = Lk<br />
⋅ Id<br />
2<br />
∫ (<strong>4.</strong>39)<br />
t<br />
u<br />
Mit der Netzfrequenz f, der Anzahl der in Reihe geschalteten Kommutierungsgruppen s, der<br />
Kommutierungszahl einer Kommutierungsgruppe q und der Überlappung u gilt für D x :<br />
cosα<br />
- cos( α + u)<br />
Dx<br />
= f ⋅s<br />
⋅ q ⋅ Lk<br />
⋅ Id<br />
= Udi<br />
⋅<br />
(<strong>4.</strong>40)<br />
2<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 50
u k<br />
u L3N<br />
0<br />
i<br />
i T1<br />
u 0<br />
u d<br />
u L1N u L2N<br />
I d<br />
u L1N + u L2N<br />
2<br />
i T2<br />
i T3<br />
ωt<br />
Einfluss des realen<br />
Kommutierungsvorganges auf<br />
die Gleichspannungsbildung<br />
(M3-Schaltung) bei glattem<br />
Gleichstrom I d<br />
Die Überlappung u hängt ab vom Strom I d , von den Kommutierungsinduktivitäten L k und von<br />
dem Steuerwinkel α. Für den dargestellten Steuerwinkel α = 0° wird die Überlappung (zwei<br />
Ventile führen gemeinsam den Gleichstrom I d ) als Anfangsüberlappung u 0 bezeichnet.<br />
u dα<br />
û Strang<br />
u L1N<br />
-û Strang<br />
u L2N u L3N<br />
ω<br />
α = 120° α = 120° α = 135° α = 150° α = 165°<br />
Ausgangsgleichspannung einer M3-Schaltung im Wechselrichterbetrieb<br />
mit Kippvorgang bei α = 165°<br />
Allgemeine Berechnungen für netzgeführte <strong>Stromrichter</strong><br />
Berechnung der ideellen Leerlaufgleichspannung U di für den ungesteuerten Gleichrichterbetrieb:<br />
q<br />
π<br />
U di = s ⋅ ⋅ 2 ⋅ U ⋅sin<br />
(<strong>4.</strong>41)<br />
π<br />
q<br />
Die ideelle Leerlaufspannung U diα beim Steuerwinkel α ergibt sich bei vollgesteuerten<br />
Schaltungen zu:<br />
q<br />
π<br />
U di α = s ⋅ ⋅ 2 ⋅ U ⋅sin<br />
⋅ cosα<br />
(<strong>4.</strong>42)<br />
π<br />
q<br />
Der Mittelwert der Gleichspannung netzgeführter <strong>Stromrichter</strong> ändert sich bei induktiver Last<br />
nach der cos-Funktion des Steuerwinkels α.<br />
Udi α = Udi<br />
⋅ cosα<br />
(<strong>4.</strong>43)<br />
t<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 51
<strong>4.</strong>2 Netzrückwirkungen<br />
Unter Netzrückwirkungen von <strong>Stromrichter</strong>n versteht man den Einfluss ihrer Blindleistung und<br />
ihrer Stromoberschwingungen auf das elektrische Netz. Hierdurch wird die Spannung gesenkt<br />
bzw. verzerrt.<br />
Induktive Blindleistung entsteht, wenn infolge der Phasenanschnittsteuerung des <strong>Stromrichter</strong>s<br />
die erste Harmonische des Netzstromes gegenüber der zugeordneten Strangspannung nacheilt. Im<br />
ungesteuerten Bereich (α = 0) entsteht induktive Blindleistung beim Kommutierungsvorgang<br />
durch den verzögerten Stromübergang von einem Ventil auf das andere. Im gesteuerten Betrieb<br />
(α > 0) wird die Phasenverschiebung um den Steuerwinkel α vergrößert und damit die vom<br />
<strong>Stromrichter</strong> aufgenommene Blindleistung erhöht.<br />
Nach ihrer Entstehung bezeichnet man diese Grundschwingungsblindleistung Q 1 als Kommutierungs-<br />
bzw. Steuerblindleistung. Wird der geringe Magnetisierungsstrom des <strong>Stromrichter</strong>transformators<br />
vernachlässigt, so gilt für vollgesteuerte Schaltungen ohne Freilaufdiode (M3, B2,<br />
B6):<br />
Q1<br />
2u + sin2α<br />
- sin[ 2 ⋅ ( α + u)<br />
]<br />
= sinϕ1<br />
=<br />
(<strong>4.</strong>44)<br />
S1<br />
4 ⋅[ cosα<br />
- cos( α + u)<br />
]<br />
Für den ungesteuerten Betrieb mit dem Steuerwinkel α = 0 und dem Überlappungswinkel u = u 0<br />
gilt:<br />
⎛ Q1<br />
⎞ 2u0<br />
- sin2u0<br />
⎜<br />
S<br />
⎟ =<br />
(<strong>4.</strong>45)<br />
⎝ 1 ⎠ 4 ⋅ ( 1- cosu )<br />
α = 0<br />
0<br />
S 1 = Scheinleistung des <strong>Stromrichter</strong>s für die Grundschwingung<br />
Häufig beträgt der Überlappungswinkel u 0 nur wenige Grad, so dass die Kommutierungsblindleistung<br />
vernachlässigt werden kann (u = 0). Aus Gl. (<strong>4.</strong>44) erhält man:<br />
⎛ Q ⎞<br />
⎜<br />
1 ⎟ = sinα<br />
(<strong>4.</strong>46)<br />
⎝ S1<br />
⎠u<br />
= 0<br />
Für den Grundschwingungsverschiebungsfaktor cosφ 1 gilt:<br />
( α + u)<br />
P Q cos cos<br />
cos<br />
1-<br />
1 α +<br />
ϕ 1 = = ≈<br />
(<strong>4.</strong>47)<br />
S<br />
2<br />
S<br />
2<br />
1<br />
1<br />
2<br />
Unter Berücksichtigung der Gln. (<strong>4.</strong>46 und <strong>4.</strong>47) ergibt sich die Ortskurve der bezogenen Blindleistung.<br />
Diese Ortskurve stellt näherungsweise einen Halbkreis dar.<br />
( ) 2<br />
Q1<br />
Q1<br />
⎛ cosα + cos α + u ⎞<br />
≈ = 1- ⎜<br />
⎟<br />
(<strong>4.</strong>48)<br />
S1<br />
Udi<br />
⋅ Id<br />
⎝ 2 ⎠<br />
Die erreichbaren Anfangswerte im Gleich- und Wechselrichterbetrieb sind von der Anfangsüberlappung<br />
u 0 abhängig.<br />
Grundschwingungsblindleistung<br />
in Abhängigkeit von der<br />
Gleichspannung für vollgesteuerte<br />
Schaltungen (M3, B6)<br />
40°<br />
20° 30°<br />
10°<br />
0°<br />
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 52<br />
γ<br />
Q 1<br />
0,8<br />
U di· I d 0,6<br />
0,4<br />
0,2<br />
Anfangsüberlappung u 0 = 0°; 10°; 20°; 30°; 40°<br />
U dα<br />
U di<br />
40°<br />
30°<br />
20°<br />
10°<br />
0°
Eine weitere Blindleistungskomponente ist die Verzerrungsblindleistung D. Wird sinusförmige<br />
Netzspannung und nichtsinusförmiger Strom vorausgesetzt, dann gilt:<br />
2<br />
I<br />
2<br />
I<br />
2<br />
k<br />
1<br />
i =<br />
ν∑ ∞ ν<br />
=<br />
gi<br />
= = 1- ki<br />
(<strong>4.</strong>49)<br />
I<br />
I<br />
k i = Oberschwingungsgehalt (Klirrfaktor) des Stromes I<br />
g i = Grundschwingungsgehalt des Stromes I<br />
S1 = S⋅<br />
gi<br />
P = S⋅<br />
gi<br />
⋅ cosϕ1<br />
= S⋅<br />
λ D = S⋅<br />
ki<br />
Q1<br />
= S⋅<br />
gi<br />
⋅ sinϕ1<br />
(<strong>4.</strong>50)<br />
Bei <strong>Stromrichter</strong>n entstehen sowohl auf der Gleichstrom- als auch auf der Wechselstromseite<br />
Oberschwingungen, die miteinander in Wechselwirkung stehen.<br />
Unter Annahme völliger Glättung des Gleichstromes und Vollaussteuerung entstehen auf der<br />
Gleichstromseite Spannungsoberschwingungen U νi .<br />
2<br />
Uν i = ⋅ Udi<br />
mit νu<br />
= k ⋅ p und k = 1, 2, 3...<br />
(<strong>4.</strong>51)<br />
2<br />
νu<br />
-1<br />
Auf der Netzseite enthält der Netzstrom I neben der Grundschwingung I 1 Oberschwingungen I ν .<br />
I<br />
I<br />
1<br />
ν =<br />
mit νi<br />
= k ⋅ p ± 1<br />
(<strong>4.</strong>52)<br />
νi<br />
ν = Ordnungszahl der Oberschwingung p = Pulszahl<br />
Maßnahmen zur Verminderung der Netzrückwirkungen<br />
Aus energietechnischen Gründen ist es wichtig, die auftretende Blindleistung und die<br />
Oberschwingungen möglichst weitgehend zu kompensieren. Das kann durch eine ventil- und<br />
netzseitige Kompensation bzw. Verringerung der Blindleistung geschehen.<br />
Vollgesteuerte Brücken- und Mittelpunktschaltungen benötigen abhängig von der Aussteuerung<br />
eine sehr hohe Blindleistung. Der maximale Wert tritt bei der Gleichspannung U dα = 0 auf.<br />
0,8<br />
Q 1<br />
U di·I d<br />
40°<br />
0°<br />
0,2<br />
γ<br />
γ<br />
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1<br />
Anfangsüberlappung u 0 = 0° bzw. 40°<br />
U dα<br />
U di<br />
Verminderung der Netzblindleistung<br />
bei Folgesteuerung<br />
Mit der Folgesteuerung von zwei Teilstromrichtern kann der Blindleistungsbedarf reduziert<br />
werden. Meistens wird die Folgesteuerung durch Reihenschaltung eines ungesteuerten<br />
<strong>Stromrichter</strong>s (Gleichrichter) mit einem steuerbaren <strong>Stromrichter</strong> gebildet; hier kann die Steuerblindleistung<br />
weitgehend vermieden werden. Ein ähnliches Verhalten bezüglich des Blindleistungsbedarfs<br />
zeigen halbgesteuerte Brückenschaltungen (B6H) mit und ohne Freilaufdiode.<br />
Netzseitig kann die Grundschwingungsblindleistung Q 1 mit Kompensationseinrichtungen<br />
erfolgen, die häufig aus regelbaren Kondensatoranlagen bestehen. Bei der Auslegung dieser<br />
Anlagen ist auf Resonanzerscheinungen zu achten, um eine Überlastung der Kondensatoren und<br />
unzulässige Verzerrungen der Netzspannung zu vermeiden. Zu Leistungskondensatoren werden<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 53
häufig Drosselspulen in Reihe geschaltet, um so die Resonanzlage der Anlage zu verstimmen. In<br />
der Praxis haben sich Resonanzfrequenzen unterhalb der 5. Oberschwingung bewährt.<br />
QC = P ⋅ ( tanϕ<br />
- tanϕC<br />
)<br />
(<strong>4.</strong>53)<br />
Die Verzerrungsleistung D kann durch Gruppenschaltungen oder durch netzseitige Saugkreise<br />
verringert werden. Saugkreise reduzieren die Stromoberschwingungen im Netz, da diese<br />
Resonanzkreise (Saugkreise) für die ausgewählten Oberschwingungen einen Kurzschluss<br />
darstellen.<br />
Mit zunehmender Pulszahl p des <strong>Stromrichter</strong>s verringert sich der Oberschwingungsgehalt des<br />
Stromes. Die Amplitude der einzelnen Stromoberschwingung ist von der Belastung und der Ordnungszahl<br />
abhängig. Bei <strong>Stromrichter</strong>leistungen oberhalb von 300 kVA finden deshalb vorwiegend<br />
12pulsige Schaltungen Anwendung.<br />
L1 L2 L3<br />
U L1N<br />
2 3<br />
U S1 2 3 1 2 U Str3<br />
I dI<br />
U dI<br />
U dII<br />
L S<br />
I dII<br />
I d<br />
U d<br />
L d<br />
M<br />
12pulsige Schaltung aus zwei parallel geschalteten Drehstrombrücken (B6.2/15-Schaltung)<br />
Q<br />
U n<br />
I Q<br />
M<br />
I ν<br />
I d<br />
I C5 I C7 I C11 I C13<br />
250 Hz<br />
ν = 5<br />
350 Hz<br />
ν = 7<br />
550 Hz<br />
ν = 11<br />
650 Hz<br />
ν = 13<br />
<strong>Stromrichter</strong> mit abgestimmten<br />
Saugkreisen<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 54
<strong>4.</strong>3 Netzgeführte Umrichter<br />
Die im Kap. <strong>4.</strong>1 behandelten netzgeführten <strong>Stromrichter</strong> ermöglichen zwar einen Energiefluss in<br />
beiden Richtungen durch Umkehr der Polarität der Gleichspannung, dabei bleibt jedoch die<br />
Stromrichtung auf der Gleichstromseite die gleiche.<br />
Soll unabhängig von der Polarität der Gleichspannung die Stromrichtung umkehrbar sein, so liegt<br />
ein Doppel-<strong>Stromrichter</strong> für Vierquadrantenbetrieb vor.<br />
Umkehrstromrichter<br />
Soll für einen Stellantrieb neben der Drehrichtung auch das Drehmoment seine Richtung<br />
umkehren, so wird zu einem <strong>Stromrichter</strong> ein zweiter gegenparallel geschaltet. Die hierfür<br />
verwendeten Umrichter nennt man Doppel-<strong>Stromrichter</strong> oder Umkehrstromrichter.<br />
Grundsätzlich muss unterschieden werden, ob beide <strong>Stromrichter</strong> aus einer dreiphasigen<br />
Spannungsquelle (Gegenparallel-Schaltung) oder über einen Transformator mit getrennten<br />
Sekundärwicklungen (Kreuzschaltung) gespeist werden.<br />
Es wird zwischen zwei Steuerverfahren unterschieden:<br />
‣ Es ist jeweils nur einer der beiden <strong>Stromrichter</strong> angesteuert; der andere sperrt:<br />
Kreisstromfreie Steuerung.<br />
‣ Es werden beide <strong>Stromrichter</strong> angesteuert; der eine im Gleichrichter-, der andere im<br />
Wechselrichterbetrieb: Steuerung mit Kreisstrom.<br />
I<br />
L Kr<br />
L Kr<br />
II<br />
L1 I<br />
V1<br />
V3 V5 V1 V3 V5<br />
L d<br />
L1 II<br />
L2 I<br />
L2 II<br />
L3 I<br />
L Kr L Kr<br />
M<br />
L3 II<br />
Umkehrstromrichter (zwei B6-Schaltungen) mit Kreisstromdrosseln<br />
Bei der Steuerung mit Kreisstrom müssen die Beträge der arithmetischen Mittelwerte der<br />
Gleichspannungen des Gleichrichters und des Wechselrichters gleich sein. Für die Steuerwinkel α<br />
gilt:<br />
αI + αII<br />
= 180°<br />
(<strong>4.</strong>54)<br />
Obwohl die arithmetischen Mittelwerte gleich sind, bestehen Unterschiede in den Augenblickswerten<br />
der Gleichspannungen. Sie führen zu Strömen, die nur über die Ventile nicht aber über die<br />
Last fließen. Solche Ströme werden Kreisströme genannt. Zu ihrer Begrenzung müssen<br />
Kreisstromdrosseln L kr zwischen beide <strong>Stromrichter</strong> geschaltet werden.<br />
L1<br />
L2<br />
L3<br />
V1 II V1 I V3 II V3 I V5 II V5 I L d<br />
M<br />
Zwei gegenparallel geschaltete<br />
B6-Schaltungen ohne<br />
Kreisstromdrosseln<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 55
Bei der Steuerung mit Kreisstrom ist der technische Aufwand bedingt durch das aufwendige<br />
Steuerverfahren, die zusätzlichen Kreisstromdrosseln, die höheren Ventil- und Netzbelastungen<br />
größer. Diese Schaltung kommt darum nur selten zur Anwendung.<br />
Beim kreisstromfreien Steuerverfahren muss gewährleistet sein, dass der zweite <strong>Stromrichter</strong> erst<br />
angesteuert wird, wenn der Strom des ersten Null geworden ist. Es ergibt sich beim Umsteuern<br />
des Stromes eine mehr oder weniger große stromlose Pause (5...10 ms).<br />
Das Steuerverfahren mit Kreisstrom hat den Vorteil, dass der Gleichstrom, da im unteren<br />
Strombereich immer beide <strong>Stromrichter</strong> angesteuert sind, ohne stromlose Pause von einer<br />
Richtung in die andere überführt werden kann. Der Betrag des Kreisstromes wird dabei meist so<br />
eingestellt, dass der Gleichstrom im Motorkreis bei der vorhanden Glättungsinduktivität L d nicht<br />
lückt.<br />
Bei verbesserten Steuerverfahren (kreisstromarme Steuerung) fließt nur bei kleinen Gleichströmen<br />
ein Kreisstrom. Bei größeren Gleichströmen wird nur ein <strong>Stromrichter</strong> angesteuert.<br />
II<br />
3~<br />
I<br />
3~<br />
WR-<br />
Betrieb<br />
GR-<br />
Betrieb<br />
I d<br />
U dα<br />
U 0 > U dα<br />
Energie<br />
I E n<br />
U 0 M<br />
U dα<br />
I d<br />
Energie<br />
I E n<br />
U 0 M<br />
U dα > U 0<br />
III<br />
3~<br />
IV<br />
3~<br />
GR-<br />
Betrieb<br />
WR-<br />
Betrieb<br />
I d<br />
U dα<br />
Energie<br />
I E n<br />
U 0 M<br />
U dα > U 0<br />
U dα<br />
I d<br />
Energie<br />
I E n<br />
U 0<br />
M<br />
U 0 > U dα<br />
Vierquadrantenbetrieb mit kreisstromfreiem Umkehrstromrichter<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 56
Direktumrichter<br />
Umkehrstromrichter können zur Umformung von Wechsel- bzw. Drehstrom einer Frequenz f 1 in<br />
eine andere Frequenz f 2 verwendet werden. Dazu muss man ihre Ausgangsspannung periodisch<br />
umsteuern, und zwar im Takt der gewünschten Ausgangsfrequenz f 2 . Die Frequenzumformung<br />
erfolgt durch direktes Umschalten der Phasenspannungen des Primärnetzes ohne Benutzung eines<br />
Gleichstromzwischenkreises, daher spricht man von Direktumrichtern. Die Ausgangsfrequenz f 2<br />
darf max. 40% der Netzfrequenz f 1 erreichen.<br />
Beim sogenannten Trapezumrichter, einem Hüllkurvenumrichter, verläuft die Spannung einer<br />
Ausgangsphase auf den Kuppen der Phasenspannungen des speisenden Drehstromnetzes.<br />
u<br />
u L1N u L2N u L3N<br />
0<br />
t<br />
T 1<br />
p 1<br />
T 1<br />
T 2<br />
n Kuppen je T 2 / 2<br />
Spannungsverlauf beim Trapezumrichter<br />
Zur Bildung der Ausgangsspannung einer Phase des Trapezumrichters ist ein Umkehrstromrichter,<br />
bestehend aus zwei antiparallelen M3-Schaltungen, erforderlich (insgesamt 18<br />
Thyristoren, p 1 = 3). Mit diesem Direktumrichter können nur diskrete, nach Gl.(<strong>4.</strong>55) berechnete<br />
Ausgangsfrequenzen f 2 erreicht werden.<br />
f p<br />
f<br />
1 ⋅ 1<br />
2 = n = 1, 2, 3,...<br />
(<strong>4.</strong>55)<br />
p + 2 ⋅ n -1<br />
1<br />
( )<br />
Beim Steuerumrichter wird die Ausgangsspannung der beiden gegenparallel arbeitenden Teilstromrichter<br />
sinusförmig ausgesteuert.<br />
Die Steuerwinkel α I und<br />
α II müssen während jeder Halbschwingung<br />
der Ausgangs-<br />
f 1<br />
spannung stetig verändert werden.<br />
Jede Ausgangsphase wird<br />
von der Gegenparallelschaltung<br />
sechspulsiger Teilstromrichter<br />
gebildet (je Phase zwei antiparallele<br />
B6-Schaltungen). Insgesamt<br />
sind also mindestens 36<br />
<strong>Stromrichter</strong>ventile erforderlich.<br />
I II I II I II<br />
f 2<br />
St<br />
U 2<br />
Schaltung des<br />
Steuerumrichters<br />
f 2<br />
M<br />
3 ~<br />
u 2<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 57
Die abgegebene Ausgangsspannung wird einem vorgegebenen sinusförmigen Sollwert möglichst<br />
gut angenähert. Beide Teilstromrichter arbeiten abwechselnd im Gleich- bzw. Wechselrichterbetrieb.<br />
Der Verschiebungsfaktor der Lastseite bestimmt dabei die jeweilige Stromrichtung.<br />
Die Differenzen in den Ausgangsspannungen der beiden Teilstromrichter einer Ausgangsphase<br />
haben Kreisströme wie beim Umkehrstromrichter zur Folge. Zur Vermeidung des Kreisstromes<br />
können auch beim Steuerumrichter kreisstromfreie Schaltungen verwendet werden. Bei<br />
Stromrichtungsumkehr tritt dann eine Totzeit auf.<br />
Wegen überwiegender Phasenanschnittsteuerung ist der Blindleistungsbedarf aus dem speisenden<br />
Drehstromnetz beim Steuerumrichter hoch.<br />
α<br />
Gleichrichterbetrieb<br />
u I<br />
0<br />
t<br />
α<br />
Wechselrichterbetrieb<br />
Spannungsverlauf in einer Phase beim Steuerumrichter<br />
<strong>4.</strong>4 Lastgeführte Wechselrichter<br />
Beim lastgeführten Wechselrichter stellt die Last die Kommutierungsspannung während der<br />
Kommutierung zur Verfügung.<br />
Da ein <strong>Stromrichter</strong> für die natürliche Kommutierung stets induktive Blindleistung braucht, ist<br />
Voraussetzung für den Betrieb lastgeführter <strong>Stromrichter</strong>, dass die Last diese zur Verfügung<br />
stellen kann. Der Laststrom muss aus diesem Grund eine kapazitive Komponente aufweisen.<br />
Diese Bedingung erfüllen Parallel- und Reihenschwingkreise oder übererregte Synchronmaschinen.<br />
Schwingkreiswechselrichter<br />
Eine ohmsch-induktive Last kann durch einen Kondensator zu einem Parallel- oder<br />
Reihenschwingkreis ergänzt werden. Die Eigenfrequenz f 0 des verlustlosen Lastkreises ist:<br />
1<br />
f 0 = (<strong>4.</strong>56)<br />
2π ⋅ L ⋅ C<br />
Die Eigenfrequenz f R des freischwingenden verlustbehafteten Lastkreises mit der Dämpfung δ<br />
heißt Kennfrequenz und berechnet sich zu:<br />
f<br />
R<br />
2<br />
R R C<br />
= f0<br />
⋅ 1- δ mit δ = = ⋅<br />
(<strong>4.</strong>57)<br />
2 ⋅ ω ⋅ L 2 L<br />
0<br />
Die Gln. (<strong>4.</strong>56 u. <strong>4.</strong>57) gelten sowohl für einen Parallel- als auch für einen Reihenschwingkreis.<br />
Die Betriebsfrequenz, mit der ein Schwingkreiswechselrichter betrieben wird, wird von der<br />
Steuerung vorgegeben. Damit der Schwingkreis eine kapazitive Stromkomponente hat, muss die<br />
Betriebsfrequenz beim Parallelschwingkreis oberhalb und beim Reihenschwingkreis unterhalb der<br />
Eigenfrequenz liegen.<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 58
Der Parallelschwingkreis-Wechselrichter hat einen rechteckförmigen Stromverlauf i 2 , der der<br />
sinusförmigen Spannung u 2 auf der Lastseite um den Löschwinkel γ voreilt.<br />
U d<br />
i d<br />
L d<br />
i A1<br />
i 2<br />
V1<br />
u C<br />
C<br />
u A1<br />
u 2<br />
V3<br />
V4<br />
L<br />
R<br />
V2<br />
ϕ<br />
i 2<br />
u 2<br />
u 2<br />
i 2<br />
U d<br />
0<br />
t ω<br />
u A1<br />
u A1<br />
i A1<br />
i A1<br />
0<br />
t ω<br />
γ<br />
Parallelschwingkreis-Wechselrichter in einphasiger Brückenschaltung<br />
mit Spannungs- und Stromverlauf (idealisiert)<br />
Der Reihenschwingkreis-Wechselrichter erzwingt einen angenähert sinusförmigen Laststrom i 2 ,<br />
welcher abwechselnd von den Thyristoren und den gegensinnig parallelen Dioden geführt wird.<br />
Die Lastspannung u 2 und damit die Ventilspannung u A haben angenähert rechteckförmigen<br />
Verlauf. Der Strom i 2 kommutiert vom nicht steuerbaren auf das jeweilige steuerbare gegensinnig<br />
parallelgeschaltete Ventil. Er eilt der Lastspannung um den Löschwinkel γ vor.<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 59
U d<br />
i d<br />
L σ<br />
i A1<br />
i 2<br />
C p<br />
D1<br />
T1<br />
u A1<br />
L R<br />
C<br />
u 2<br />
D3<br />
T3<br />
D4<br />
T4<br />
D2<br />
T2<br />
ϕ<br />
i 2 u 2<br />
u 2<br />
i 2<br />
U d<br />
0<br />
i T<br />
i D<br />
t ω<br />
u A1<br />
i A1<br />
u A1<br />
i A1<br />
0<br />
γ<br />
t ω<br />
Reihenschwingkreis-Wechselrichter in einphasiger<br />
Brückenschaltung mit Spannungs- und Stromverlauf<br />
Die erreichbare obere Frequenzgrenze von Schwingkreiswechselrichtern wird im Wesentlichen<br />
durch die Freiwerdezeiten der Thyristoren bestimmt. Man erreicht Betriebsfrequenzen von über<br />
10 kHz.<br />
Für das Anschwingen der Last ist besonders bei Parallelschwingkreis-Wechselrichtern eine<br />
Starteinrichtung erforderlich. Dazu werden kapazitive Energiespeicher auf der Last- oder auf der<br />
Gleichstromseite vorgeladen.<br />
Für die Grundschwingung der Wechselspannung U 1 und die Grundschwingung des<br />
Wechselstromes I 1 gilt für den einphasigen Parallelschwingkreis:<br />
π<br />
8<br />
U1 = ⋅ Ud<br />
I1<br />
= ⋅ Id<br />
(<strong>4.</strong>58)<br />
8 ⋅ cosγ<br />
π<br />
Für den einphasigen Reihenschwingkreis gilt:<br />
8<br />
π<br />
U1 = ⋅ Ud<br />
I1<br />
= ⋅ Id<br />
(<strong>4.</strong>59)<br />
π<br />
8 ⋅ cosγ<br />
Schwingkreiswechselrichter mit vorgeschaltetem Gleichrichter werden Schwingkreisumrichter<br />
genannt.<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 60
Maschinengeführter Wechselrichter<br />
Der lastgeführte Wechselrichter bezieht von einer übererregten Synchronmaschine seine Kommutierungsblindleistung.<br />
Die Schaltung ermöglicht im Allgemeinen auch eine Umkehr des<br />
Energieflusses.<br />
Die Schaltung „Maschinengeführter Wechselrichter“, die aus der Hintereinanderschaltung eines<br />
netzgeführten Gleichrichters und eines lastgeführten Wechselrichters mit Synchronmaschine als<br />
Last besteht, wird auch <strong>Stromrichter</strong>motor genannt.<br />
Im Allgemeinen wird im Gleichstromzwischenkreis eine Glättungsinduktivität L d vorgesehen, die<br />
den netzseitigen <strong>Stromrichter</strong> I vom lastseitigen II energetisch entkoppelt.<br />
I<br />
L d<br />
I d<br />
II<br />
L1<br />
L2<br />
U dI<br />
U dII<br />
L3<br />
I E<br />
Maschinengeführter Wechselrichter (<strong>Stromrichter</strong>motor)<br />
Der netzseitige <strong>Stromrichter</strong> I arbeitet im Motorbetrieb der angeschlossenen Synchronmaschine<br />
als netzgeführter Gleichrichter. Er erzeugt die durch Anschnittsteuerung über den Steuerwinkel α<br />
einstellbare Gleichspannung U dI . Der Strom im Gleichstromzwischenkreis I d wird durch die<br />
Induktivität L d geglättet.<br />
Der lastseitige <strong>Stromrichter</strong> arbeitet als lastgeführter Wechselrichter. Er erzeugt die Gleichspannung<br />
U dII . Da Wechselrichterbetrieb vorliegt, ist der Mittelwert dieser Gleichspannung negativ.<br />
Im stationären Betrieb ist, wie beim Umkehrstromrichter mit Kreisstrom, U dII = -U dI .<br />
Arbeitet die Synchronmaschine als Generator, so muss der <strong>Stromrichter</strong> II in den Gleichrichterbetrieb<br />
und der <strong>Stromrichter</strong> I in den Wechselrichterbetrieb umgesteuert werden.<br />
Im Stillstand kann die Synchronmaschine kein führendes Netz auf der Sekundärseite erzeugen, so<br />
dass das Anfahren z.B. durch Auf- und Zusteuern des eingangsseitigen <strong>Stromrichter</strong>s im Takt der<br />
niedrigen Anfahrfrequenz erfolgen kann.<br />
Der lastgeführte <strong>Stromrichter</strong> II wird hinsichtlich der Zündbefehle an seine Thyristoren von der<br />
Maschinenwelle aus gesteuert. Ein Geber, z.B. mit Hallsonden, erfasst laufend die Polradstellung<br />
und legt danach die Zuschaltung des Ständerstromes I d auf die Wicklungsstränge fest.<br />
Für mittlere bis große Leistungen (300 kW - 3 MW) hat sich die Technik des <strong>Stromrichter</strong>motors<br />
- meistens mit bürstenloser Erregung - durchgesetzt.<br />
G. Schenke, 12.2006 Leistungselektronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 61