5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Da bei wachsender Getriebeübersetzung der Wirkungsgrad eines Getriebes abnimmt, ist es<br />
bei großen erforderlichen Getriebeübersetzungen oft vorteilhaft, eine Kombination aus<br />
Getriebe und Zahnriemenübersetzung zu wählen.<br />
Bei tänzerlagegeregelten Wicklern ist der Wirkungsgrad des Getriebes kaum von Bedeutung.<br />
Hier ist eher eine große Übersetzung für die Stabilität der Tänzerlageregelung vorteilhaft.<br />
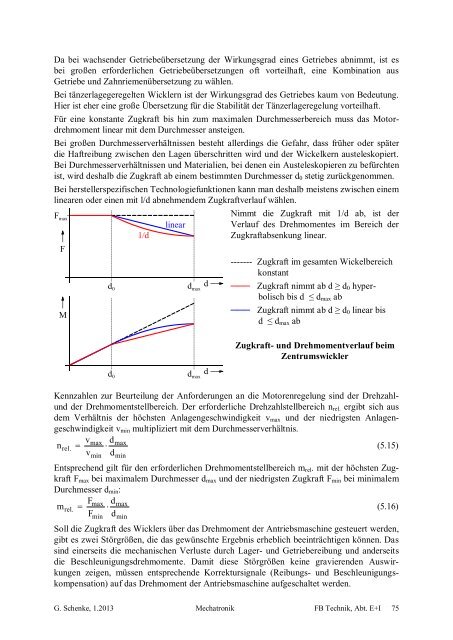
Für eine konstante Zugkraft bis hin zum maximalen Durchmesserbereich muss das Motordrehmoment<br />
linear <strong>mit</strong> dem Durchmesser ansteigen.<br />
Bei großen Durchmesserverhältnissen besteht allerdings die Gefahr, dass früher oder später<br />
die Haftreibung zwischen den Lagen überschritten wird und der Wickelkern austeleskopiert.<br />
Bei Durchmesserverhältnissen und Materialien, bei denen ein Austeleskopieren zu befürchten<br />
ist, wird deshalb die Zugkraft ab einem bestimmten Durchmesser d 0 stetig zurückgenommen.<br />
Bei herstellerspezifischen <strong>Technologiefunktionen</strong> kann man deshalb meistens zwischen einem<br />
linearen oder einen <strong>mit</strong> l/d abnehmendem Zugkraftverlauf wählen.<br />
F max<br />
F<br />
M<br />
d 0<br />
1/d<br />
linear<br />
d max<br />
d<br />
Nimmt die Zugkraft <strong>mit</strong> 1/d ab, ist der<br />
Verlauf des Drehmomentes im Bereich der<br />
Zugkraftabsenkung linear.<br />
------- Zugkraft im gesamten Wickelbereich<br />
konstant<br />
Zugkraft nimmt ab d d 0 hyperbolisch<br />
bis d d max ab<br />
Zugkraft nimmt ab d d 0 linear bis<br />
d d max ab<br />
d 0<br />
d max<br />
d<br />
Zugkraft- und Drehmomentverlauf beim<br />
Zentrumswickler<br />
Kennzahlen zur Beurteilung der Anforderungen an die Motorenregelung sind der Drehzahlund<br />
der Drehmomentstellbereich. Der erforderliche Drehzahlstellbereich n rel. ergibt sich aus<br />
dem Verhältnis der höchsten Anlagengeschwindigkeit v max und der niedrigsten Anlagengeschwindigkeit<br />
v min multipliziert <strong>mit</strong> dem Durchmesserverhältnis.<br />
vmax<br />
d<br />
n<br />
max<br />
rel. <br />
(<strong>5.</strong>15)<br />
v d<br />
min<br />
min<br />
Entsprechend gilt für den erforderlichen Drehmomentstellbereich m rel . <strong>mit</strong> der höchsten Zugkraft<br />
F max bei maximalem Durchmesser d max und der niedrigsten Zugkraft F min bei minimalem<br />
Durchmesser d min :<br />
Fmax<br />
d<br />
m<br />
max<br />
rel. <br />
(<strong>5.</strong>16)<br />
F d<br />
min<br />
min<br />
Soll die Zugkraft des Wicklers über das Drehmoment der Antriebsmaschine gesteuert werden,<br />
gibt es zwei Störgrößen, die das gewünschte Ergebnis erheblich beeinträchtigen können. Das<br />
sind einerseits die mechanischen Verluste durch Lager- und Getriebereibung und anderseits<br />
die Beschleunigungsdrehmomente. Da<strong>mit</strong> diese Störgrößen keine gravierenden Auswirkungen<br />
zeigen, müssen entsprechende Korrektursignale (Reibungs- und Beschleunigungskompensation)<br />
auf das Drehmoment der Antriebsmaschine aufgeschaltet werden.<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 75