5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
In der Regel hat der Zugkraftregler aus Stabilitätsgründen nur eine sehr geringe Dynamik. Der<br />
Beschleunigungskompensation kommt hier deshalb eine besondere Bedeutung zu.<br />
Können Störgrößen, wie sie bei Beschleunigungsvorgängen oder Exzentrizitäten entstehen,<br />
nicht ausreichend kompensiert werden, so ist eine Tänzerlageregelung vorzuziehen.<br />
Bei der Tänzerlageregelung wird die Bahnspannung ausschließlich durch die dem Wickler<br />
vorgeschaltete Tänzereinrichtung erzeugt. Mit der Tänzerlageregelung können dynamische<br />
Störgrößen problemlos ausgeregelt werden. Sie wird vorwiegend bei Material (Kabel, Draht,<br />
Textilien, Folien, Papier) eingesetzt, wo eine absolute Zugkraftgenauigkeit notwendig ist.<br />
v<br />
F<br />
v Linie<br />
s Tänzer<br />
M W , n W<br />
i<br />
n<br />
M<br />
ASYM<br />
R<br />
s Tänzer<br />
n ist<br />
F soll<br />
3<br />
s Tsoll<br />
d<br />
1/d<br />
4<br />
2<br />
5<br />
1<br />
n soll<br />
Motorregler<br />
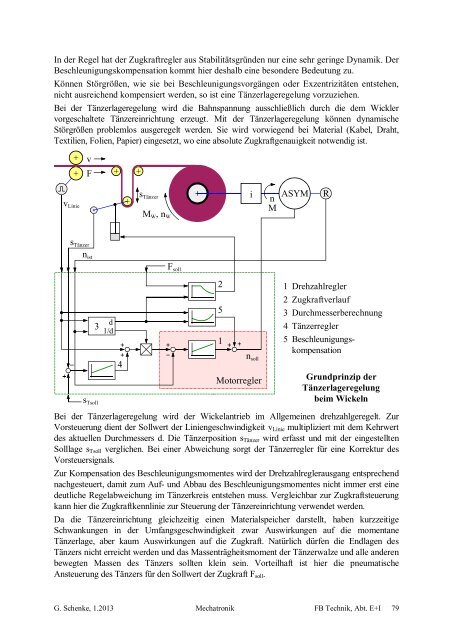
1 Drehzahlregler<br />
2 Zugkraftverlauf<br />
3 Durchmesserberechnung<br />
4 Tänzerregler<br />
5 Beschleunigungskompensation<br />
Grundprinzip der<br />
Tänzerlageregelung<br />
beim Wickeln<br />
Bei der Tänzerlageregelung wird der Wickelantrieb im Allgemeinen drehzahlgeregelt. Zur<br />
Vorsteuerung dient der Sollwert der Liniengeschwindigkeit v Linie multipliziert <strong>mit</strong> dem Kehrwert<br />
des aktuellen Durchmessers d. Die Tänzerposition s Tänzer wird erfasst und <strong>mit</strong> der eingestellten<br />
Solllage s Tsoll verglichen. Bei einer Abweichung sorgt der Tänzerregler für eine Korrektur des<br />
Vorsteuersignals.<br />
Zur Kompensation des Beschleunigungsmomentes wird der Drehzahlreglerausgang entsprechend<br />
nachgesteuert, da<strong>mit</strong> zum Auf- und Abbau des Beschleunigungsmomentes nicht immer erst eine<br />
deutliche Regelabweichung im Tänzerkreis entstehen muss. Vergleichbar zur Zugkraftsteuerung<br />
kann hier die Zugkraftkennlinie zur Steuerung der Tänzereinrichtung verwendet werden.<br />
Da die Tänzereinrichtung gleichzeitig einen Materialspeicher darstellt, haben kurzzeitige<br />
Schwankungen in der Umfangsgeschwindigkeit zwar Auswirkungen auf die momentane<br />
Tänzerlage, aber kaum Auswirkungen auf die Zugkraft. Natürlich dürfen die Endlagen des<br />
Tänzers nicht erreicht werden und das Massenträgheitsmoment der Tänzerwalze und alle anderen<br />
bewegten Massen des Tänzers sollten klein sein. Vorteilhaft ist hier die pneumatische<br />
Ansteuerung des Tänzers für den Sollwert der Zugkraft F soll .<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 79