5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
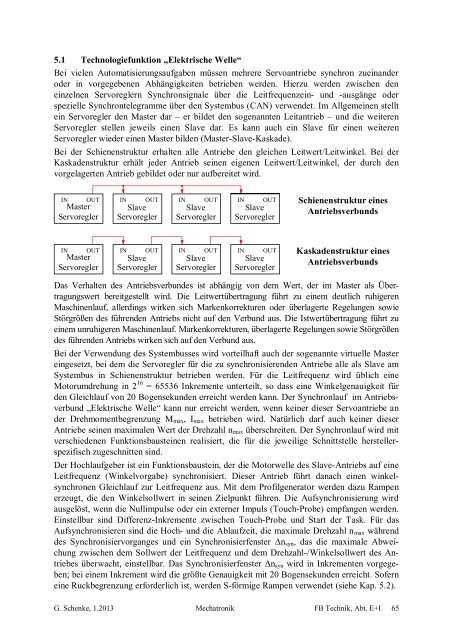
<strong>5.</strong>1 Technologiefunktion „Elektrische Welle“<br />
Bei vielen Automatisierungsaufgaben müssen mehrere Servoantriebe synchron zueinander<br />
oder in vorgegebenen Abhängigkeiten betrieben werden. Hierzu werden zwischen den<br />
einzelnen Servoreglern Synchronsignale über die Leitfrequenzein- und -ausgänge oder<br />
spezielle Synchrontelegramme über den Systembus (CAN) verwendet. Im Allgemeinen stellt<br />
ein Servoregler den Master dar – er bildet den sogenannten Leitantrieb – und die weiteren<br />
Servoregler stellen jeweils einen Slave dar. Es kann auch ein Slave für einen weiteren<br />
Servoregler wieder einen Master bilden (Master-Slave-Kaskade).<br />
Bei der Schienenstruktur erhalten alle Antriebe den gleichen Leitwert/Leitwinkel. Bei der<br />
Kaskadenstruktur erhält jeder Antrieb seinen eigenen Leitwert/Leitwinkel, der durch den<br />
vorgelagerten Antrieb gebildet oder nur aufbereitet wird.<br />
IN OUT<br />
Master<br />
Servoregler<br />
IN<br />
OUT<br />
IN<br />
OUT<br />
Slave Slave Slave<br />
Servoregler Servoregler Servoregler<br />
IN<br />
OUT<br />
Schienenstruktur eines<br />
Antriebsverbunds<br />
IN OUT<br />
Master<br />
Servoregler<br />
IN<br />
OUT<br />
IN<br />
OUT<br />
Slave Slave Slave<br />
Servoregler Servoregler Servoregler<br />
IN<br />
OUT<br />
Kaskadenstruktur eines<br />
Antriebsverbunds<br />
Das Verhalten des Antriebsverbundes ist abhängig von dem Wert, der im Master als Übertragungswert<br />
bereitgestellt wird. Die Leitwertübertragung führt zu einem deutlich ruhigeren<br />
Maschinenlauf, allerdings wirken sich Markenkorrekturen oder überlagerte Regelungen sowie<br />
Störgrößen des führenden Antriebs nicht auf den Verbund aus. Die Istwertübertragung führt zu<br />
einem unruhigeren Maschinenlauf. Markenkorrekturen, überlagerte Regelungen sowie Störgrößen<br />
des führenden Antriebs wirken sich auf den Verbund aus.<br />
Bei der Verwendung des Systembusses wird vorteilhaft auch der sogenannte virtuelle Master<br />
eingesetzt, bei dem die Servoregler für die zu synchronisierenden Antriebe alle als Slave am<br />
Systembus in Schienenstruktur betrieben werden. Für die Leitfrequenz wird üblich eine<br />
Motorumdrehung in 2 16 = 65536 Inkremente unterteilt, so dass eine Winkelgenauigkeit für<br />
den Gleichlauf von 20 Bogensekunden erreicht werden kann. Der Synchronlauf im Antriebsverbund<br />
„Elektrische Welle“ kann nur erreicht werden, wenn keiner dieser Servoantriebe an<br />
der Drehmomentbegrenzung M max , I max betrieben wird. Natürlich darf auch keiner dieser<br />
Antriebe seinen maximalen Wert der Drehzahl n max überschreiten. Der Synchronlauf wird <strong>mit</strong><br />
verschiedenen Funktionsbausteinen realisiert, die für die jeweilige Schnittstelle herstellerspezifisch<br />
zugeschnitten sind.<br />
Der Hochlaufgeber ist ein Funktionsbaustein, der die Motorwelle des Slave-Antriebs auf eine<br />
Leitfrequenz (Winkelvorgabe) synchronisiert. Dieser Antrieb führt danach einen winkelsynchronen<br />
Gleichlauf zur Leitfrequenz aus. Mit dem Profilgenerator werden dazu Rampen<br />
erzeugt, die den Winkelsollwert in seinen Zielpunkt führen. Die Aufsynchronisierung wird<br />
ausgelöst, wenn die Nullimpulse oder ein externer Impuls (Touch-Probe) empfangen werden.<br />
Einstellbar sind Differenz-Inkremente zwischen Touch-Probe und Start der Task. Für das<br />
Aufsynchronisieren sind die Hoch- und die Ablaufzeit, die maximale Drehzahl n max während<br />
des Synchronisiervorganges und ein Synchronisierfenster n syn , das die maximale Abweichung<br />
zwischen dem Sollwert der Leitfrequenz und dem Drehzahl-/Winkelsollwert des Antriebes<br />
überwacht, einstellbar. Das Synchronisierfenster n syn wird in Inkrementen vorgegeben;<br />
bei einem Inkrement wird die größte Genauigkeit <strong>mit</strong> 20 Bogensekunden erreicht. Sofern<br />
eine Ruckbegrenzung erforderlich ist, werden S-förmige Rampen verwendet (siehe Kap. <strong>5.</strong>2).<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 65