5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Unter Handfahren versteht man das Verfahren des Antriebs durch manuelle Bedienung.<br />
Bei den weiteren Darstellungen zur Positionierung bleiben die Maßnahmen zur Ruckbegrenzung<br />
unberücksichtigt.<br />
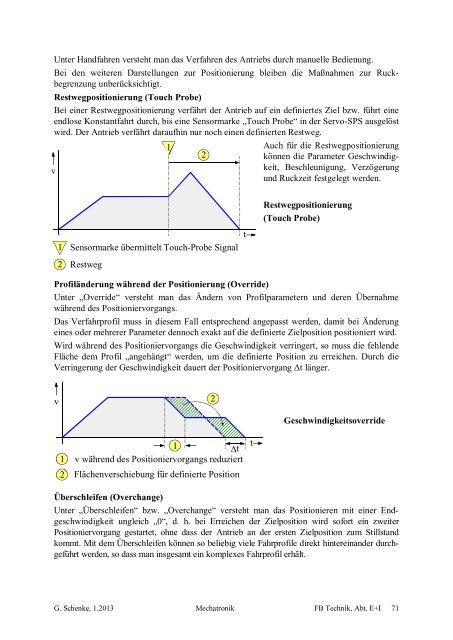
Restwegpositionierung (Touch Probe)<br />
Bei einer Restwegpositionierung verfährt der Antrieb auf ein definiertes Ziel bzw. führt eine<br />
endlose Konstantfahrt durch, bis eine Sensormarke „Touch Probe“ in der Servo-SPS ausgelöst<br />
wird. Der Antrieb verfährt daraufhin nur noch einen definierten Restweg.<br />
v<br />
1<br />
2<br />
Auch für die Restwegpositionierung<br />
können die Parameter Geschwindigkeit,<br />
Beschleunigung, Verzögerung<br />
und Ruckzeit festgelegt werden.<br />
Restwegpositionierung<br />
(Touch Probe)<br />
1 Sensormarke über<strong>mit</strong>telt Touch-Probe Signal<br />
t<br />
2 Restweg<br />
Profiländerung während der Positionierung (Override)<br />
Unter „Override“ versteht man das Ändern von Profilparametern und deren Übernahme<br />
während des Positioniervorgangs.<br />
Das Verfahrprofil muss in diesem Fall entsprechend angepasst werden, da<strong>mit</strong> bei Änderung<br />
eines oder mehrerer Parameter dennoch exakt auf die definierte Zielposition positioniert wird.<br />
Wird während des Positioniervorgangs die Geschwindigkeit verringert, so muss die fehlende<br />
Fläche dem Profil „angehängt“ werden, um die definierte Position zu erreichen. Durch die<br />
Verringerung der Geschwindigkeit dauert der Positioniervorgang t länger.<br />
v<br />
2<br />
Geschwindigkeitsoverride<br />
1<br />
1 t<br />
v während des Positioniervorgangs reduziert<br />
2 Flächenverschiebung für definierte Position<br />
t<br />
Überschleifen (Overchange)<br />
Unter „Überschleifen“ bzw. „Overchange“ versteht man das Positionieren <strong>mit</strong> einer Endgeschwindigkeit<br />
ungleich „0“, d. h. bei Erreichen der Zielposition wird sofort ein zweiter<br />
Positioniervorgang gestartet, ohne dass der Antrieb an der ersten Zielposition zum Stillstand<br />
kommt. Mit dem Überschleifen können so beliebig viele Fahrprofile direkt hintereinander durchgeführt<br />
werden, so dass man insgesamt ein komplexes Fahrprofil erhält.<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 71