5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Die Bewegungsprofile werden im Speicher der Servo-SPS in Form von Stützstellen-Tabellen<br />
abgelegt, wobei zwischen relativen und absolutem Datenmodell unterschieden wird:<br />
‣ Beim relativen Datenmodell sind die Stützstellen äquidistant verteilt, d. h. der Abstand<br />
zwischen zwei Stützstellen in X-Richtung (Leitwert) ist konstant.<br />
‣ Beim absoluten Datenmodell sind die Stützstellen beliebig verteilt. Das absolute Datenmodell<br />
ist flexibler als das relative Datenmodell, benötigt bei gleicher Stützstellenzahl aber mehr<br />
Speicher als das relative Datenmodell. Der CamDesigner bietet die Möglichkeit, die Lage der<br />
Stützpunkte entsprechend der Kurvenform zu optimieren.<br />
Ähnlich wie bei der Technologiefunktion „Elektrische Welle“, kann zum Generieren einer<br />
Leitfrequenz oder eines Leitwinkels ein virtueller Master bei der Technologiefunktion „Kurvenscheibe“<br />
softwaremäßig realisiert werden. Da die verschiedenen Antriebe insbesondere bei der<br />
Inbetriebnahme unabhängig voneinander betrieben werden müssen, muss der Masterantrieb von<br />
dem übrigen Antriebsverbund abgekoppelt werden können. Die virtuelle Kupplung stellt eine<br />
Software-Funktionalität zur Verfügung, <strong>mit</strong> der eine Achse vom Verbund bzw. Leitantrieb<br />
getrennt und fliegend wieder eingekuppelt werden kann. Erst nach Beendigung des<br />
Einkupplungsvorgangs hat der Slave seinen festen Bezug zum Master.<br />
Servomotor<br />
i<br />
Y<br />
R Z<br />
-10 0-Position 10 20<br />
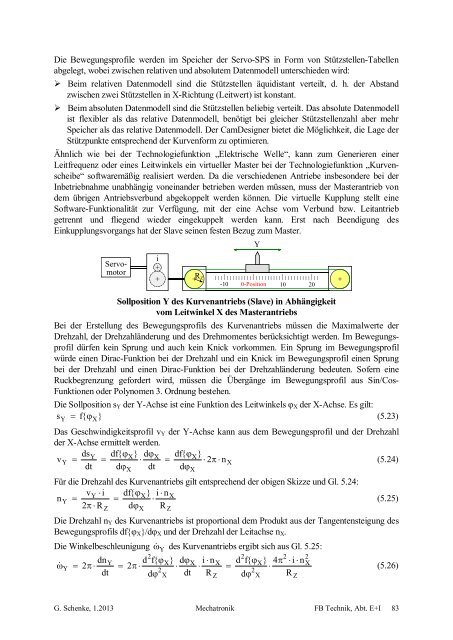
Sollposition Y des Kurvenantriebs (Slave) in Abhängigkeit<br />
vom Leitwinkel X des Masterantriebs<br />
Bei der Erstellung des Bewegungsprofils des Kurvenantriebs müssen die Maximalwerte der<br />
Drehzahl, der Drehzahländerung und des Drehmomentes berücksichtigt werden. Im Bewegungsprofil<br />
dürfen kein Sprung und auch kein Knick vorkommen. Ein Sprung im Bewegungsprofil<br />
würde einen Dirac-Funktion bei der Drehzahl und ein Knick im Bewegungsprofil einen Sprung<br />
bei der Drehzahl und einen Dirac-Funktion bei der Drehzahländerung bedeuten. Sofern eine<br />
Ruckbegrenzung gefordert wird, müssen die Übergänge im Bewegungsprofil aus Sin/Cos-<br />
Funktionen oder Polynomen 3. Ordnung bestehen.<br />
Die Sollposition s Y der Y-Achse ist eine Funktion des Leitwinkels X der X-Achse. Es gilt:<br />
s f{ }<br />
(<strong>5.</strong>23)<br />
Y<br />
X<br />
Das Geschwindigkeitsprofil v Y der Y-Achse kann aus dem Bewegungsprofil und der Drehzahl<br />
der X-Achse er<strong>mit</strong>telt werden.<br />
dsY<br />
df{ X}<br />
dX<br />
df{ X}<br />
vY<br />
2<br />
nX<br />
(<strong>5.</strong>24)<br />
dt d<br />
dt d<br />
X<br />
Für die Drehzahl des Kurvenantriebs gilt entsprechend der obigen Skizze und Gl. <strong>5.</strong>24:<br />
vY<br />
i<br />
df{ X}<br />
i n<br />
n<br />
X<br />
Y <br />
(<strong>5.</strong>25)<br />
2 R d<br />
R<br />
Z<br />
X<br />
Die Drehzahl n Y des Kurvenantriebs ist proportional dem Produkt aus der Tangentensteigung des<br />
Bewegungsprofils df{ X }/d X und der Drehzahl der Leitachse n X .<br />
Die Winkelbeschleunigung des Kurvenantriebs ergibt sich aus Gl. <strong>5.</strong>25:<br />
2<br />
Y<br />
Z<br />
X<br />
2<br />
X<br />
X<br />
dnY<br />
d f{ } dX<br />
i nX<br />
d f{ } 4<br />
i<br />
n<br />
<br />
Y 2<br />
2<br />
<br />
(<strong>5.</strong>26)<br />
dt d<br />
dt R d<br />
R<br />
Z<br />
2<br />
X<br />
2<br />
X<br />
2<br />
Z<br />
2<br />
X<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 83