5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
n Ma<br />
n Sl<br />
n syn<br />
n soll<br />
1<br />
t 2<br />
n max<br />
n soll<br />
3<br />
Nullimpuls bzw.<br />
Touch-Probe<br />
Start der Task<br />
Stop gesetzt<br />
4<br />
Stop zurückgesetzt<br />
b stop<br />
t<br />
5<br />
Synchronisierung<br />
erfolgt<br />
t<br />
b syn<br />
1 2 3 4<br />
5<br />
t<br />
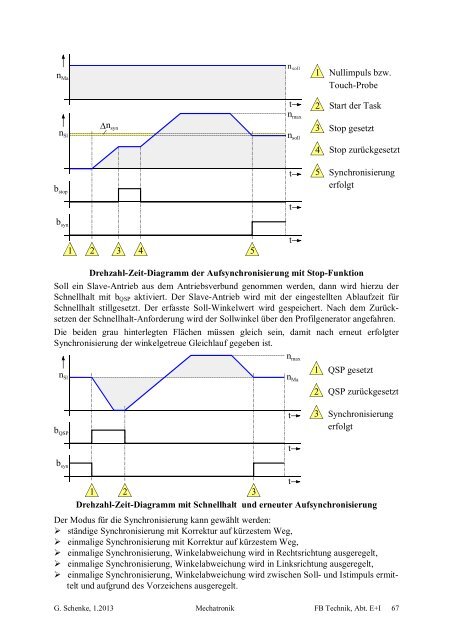
Drehzahl-Zeit-Diagramm der Aufsynchronisierung <strong>mit</strong> Stop-Funktion<br />
Soll ein Slave-Antrieb aus dem Antriebsverbund genommen werden, dann wird hierzu der<br />
Schnellhalt <strong>mit</strong> b QSP aktiviert. Der Slave-Antrieb wird <strong>mit</strong> der eingestellten Ablaufzeit für<br />
Schnellhalt stillgesetzt. Der erfasste Soll-Winkelwert wird gespeichert. Nach dem Zurücksetzen<br />
der Schnellhalt-Anforderung wird der Sollwinkel über den Profilgenerator angefahren.<br />
Die beiden grau hinterlegten Flächen müssen gleich sein, da<strong>mit</strong> nach erneut erfolgter<br />
Synchronisierung der winkelgetreue Gleichlauf gegeben ist.<br />
n Sl<br />
n max<br />
1<br />
n Ma<br />
2<br />
QSP gesetzt<br />
QSP zurückgesetzt<br />
b QSP<br />
t<br />
3<br />
Synchronisierung<br />
erfolgt<br />
t<br />
b syn<br />
t<br />
1 2<br />
3<br />
Drehzahl-Zeit-Diagramm <strong>mit</strong> Schnellhalt und erneuter Aufsynchronisierung<br />
Der Modus für die Synchronisierung kann gewählt werden:<br />
‣ ständige Synchronisierung <strong>mit</strong> Korrektur auf kürzestem Weg,<br />
‣ einmalige Synchronisierung <strong>mit</strong> Korrektur auf kürzestem Weg,<br />
‣ einmalige Synchronisierung, Winkelabweichung wird in Rechtsrichtung ausgeregelt,<br />
‣ einmalige Synchronisierung, Winkelabweichung wird in Linksrichtung ausgeregelt,<br />
‣ einmalige Synchronisierung, Winkelabweichung wird zwischen Soll- und Istimpuls er<strong>mit</strong>telt<br />
und aufgrund des Vorzeichens ausgeregelt.<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 67