5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Das Fahrprofil bei einem kurzen Weg kann in 6 Bereiche eingeteilt werden. Die ersten drei<br />
Bereiche (B1, B2 und B3) beschreiben den Beschleunigungsvorgang, dem sofort der<br />
Verzögerungsvorgang (B4, B5 und B6) folgt. Ohne Ruckbegrenzung (t R =0) gelten im<br />
Zeitbereich t B0 <strong>mit</strong> konstanter Beschleunigung die Gleichungen für den Bereich B2 und im<br />
Zeitbereich t V0 <strong>mit</strong> konstanter Verzögerung die Gleichungen für den Bereich B<strong>5.</strong><br />
Gleichungen für die Beschleunigung a, die Geschwindigkeit v und den Weg s während des<br />
Beschleunigungsvorgangs (t zählt jeweils ab Bereichsanfang).<br />
B 2 :<br />
B 3 :<br />
a<br />
a<br />
s<br />
<br />
<br />
<br />
<br />
a<br />
a<br />
a<br />
B<br />
B<br />
B<br />
B<br />
<br />
R<br />
1<br />
<br />
<br />
t<br />
t<br />
R<br />
2<br />
<br />
t<br />
<br />
R t<br />
<br />
6<br />
<br />
<br />
<br />
R<br />
t<br />
2<br />
B<br />
v<br />
v<br />
<br />
<br />
<br />
2<br />
t<br />
<br />
B<br />
2<br />
a<br />
a<br />
B<br />
B<br />
B<br />
t<br />
<br />
t<br />
<br />
2 t<br />
t<br />
<br />
R<br />
<br />
2<br />
<br />
t<br />
<br />
<br />
<br />
t<br />
<br />
R<br />
t<br />
2<br />
t<br />
t<br />
2<br />
R<br />
2<br />
R<br />
B<br />
B<br />
t<br />
t <br />
2 t<br />
t<br />
t <br />
2<br />
t<br />
<br />
6 t<br />
Für die Verfahrzeiten t B und t V <strong>mit</strong> konstanter Beschleunigung a B bzw. Verzögerung a V gilt:<br />
vmax<br />
v<br />
t<br />
max<br />
B tR<br />
tV<br />
tR<br />
(<strong>5.</strong>6)<br />
a<br />
a<br />
a<br />
v<br />
s<br />
B1:<br />
a<br />
B<br />
B1<br />
t R<br />
a<br />
t<br />
t<br />
B2<br />
t<br />
v B0<br />
max0<br />
v max<br />
t B<br />
v<br />
a<br />
V<br />
B3 B4 B5 B6<br />
t R<br />
t R<br />
t V0<br />
t V<br />
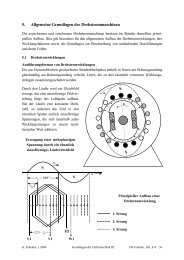
Das Fahrprofil ist der zeitliche<br />
Verlauf der Geschwindigkeit v<br />
während eines Positioniervorganges.<br />
Durch die Ruckbegrenzung<br />
wird bei einem Positioniervorgang<br />
<strong>mit</strong> einem kurzen Weg<br />
die maximale Geschwindigkeit<br />
reduziert (v max < v max0 ). Gleichzeitig<br />
wird die gesamte Verfahrzeit<br />
durch die Ruckbegrenzung<br />
vergrößert.<br />
(t B0 + t V0 < 4 · t R + t B + t V )<br />
Bei sehr kurzen Verfahrwegen<br />
darf die Ruckzeit t R nicht zu<br />
groß gewählt werden, da die<br />
maximale Beschleunigung und<br />
die maximale Verzögerung<br />
während des Positioniervorgangs<br />
erreicht werden müssen.<br />
Fahrprofil v für einen Positioniervorgang<br />
<strong>mit</strong> kurzem Verfahrweg<br />
und gleichzeitiger<br />
Darstellung von Beschleunigung<br />
/Verzögerung a und Weg s<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 69<br />
t R<br />
2<br />
t<br />
t<br />
t<br />
2<br />
s<br />
s<br />
R<br />
<br />
<br />
<br />
<br />
<br />
3<br />
R<br />
a<br />
a<br />
B<br />
<br />
<br />
<br />
B<br />
3<br />
t<br />
<br />
6 t<br />
R<br />
2<br />
<br />
t<br />
<br />
R t<br />
<br />
6<br />
2<br />
t t<br />
<br />
2 2<br />
R<br />
<br />
<br />
(<strong>5.</strong>5)