5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2<strong>5.</strong>17<br />
S<br />
Y<br />
<br />
S<br />
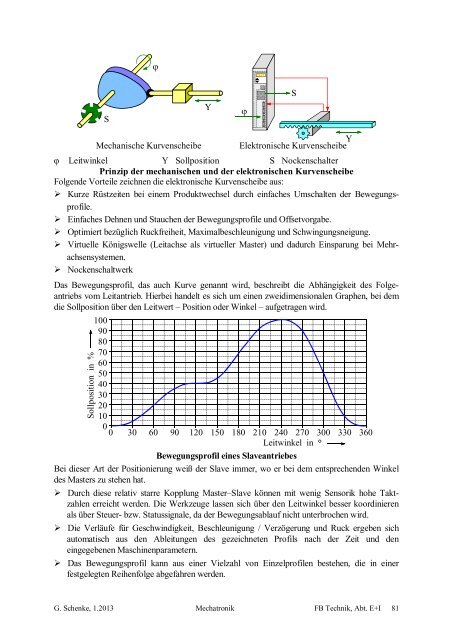
Mechanische Kurvenscheibe<br />
Y<br />
Elektronische Kurvenscheibe<br />
Leitwinkel Y Sollposition S Nockenschalter<br />
Prinzip der mechanischen und der elektronischen Kurvenscheibe<br />
Folgende Vorteile zeichnen die elektronische Kurvenscheibe aus:<br />
‣ Kurze Rüstzeiten bei einem Produktwechsel durch einfaches Umschalten der Bewegungsprofile.<br />
‣ Einfaches Dehnen und Stauchen der Bewegungsprofile und Offsetvorgabe.<br />
‣ Optimiert bezüglich Ruckfreiheit, Maximalbeschleunigung und Schwingungsneigung.<br />
‣ Virtuelle Königswelle (Leitachse als virtueller Master) und dadurch Einsparung bei Mehrachsensystemen.<br />
‣ Nockenschaltwerk<br />
Das Bewegungsprofil, das auch Kurve genannt wird, beschreibt die Abhängigkeit des Folgeantriebs<br />
vom Leitantrieb. Hierbei handelt es sich um einen zweidimensionalen Graphen, bei dem<br />
die Sollposition über den Leitwert – Position oder Winkel – aufgetragen wird.<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0 30 60 90 120 150 180 210 240 270 300 330 360<br />
Leitwinkel in °<br />
Bewegungsprofil eines Slaveantriebes<br />
Bei dieser Art der Positionierung weiß der Slave immer, wo er bei dem entsprechenden Winkel<br />
des Masters zu stehen hat.<br />
Sollposition in %<br />
‣ Durch diese relativ starre Kopplung Master–Slave können <strong>mit</strong> wenig Sensorik hohe Taktzahlen<br />
erreicht werden. Die Werkzeuge lassen sich über den Leitwinkel besser koordinieren<br />
als über Steuer- bzw. Statussignale, da der Bewegungsablauf nicht unterbrochen wird.<br />
‣ Die Verläufe für Geschwindigkeit, Beschleunigung / Verzögerung und Ruck ergeben sich<br />
automatisch aus den Ableitungen des gezeichneten Profils nach der Zeit und den<br />
eingegebenen Maschinenparametern.<br />
‣ Das Bewegungsprofil kann aus einer Vielzahl von Einzelprofilen bestehen, die in einer<br />
festgelegten Reihenfolge abgefahren werden.<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 81