5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home
5. Technologiefunktionen mit Servoantrieben - FB E+I: Home

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
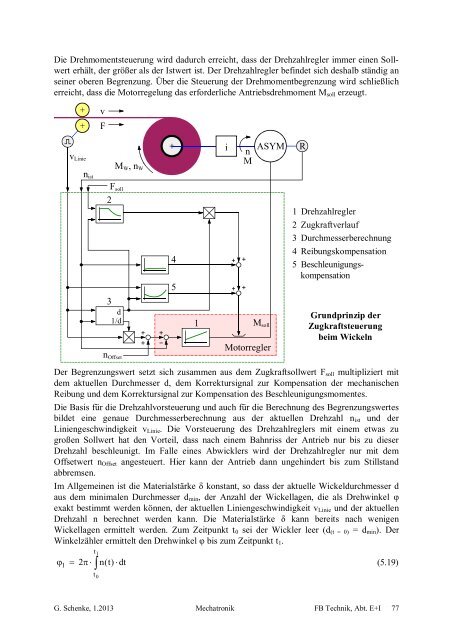
Die Drehmomentsteuerung wird dadurch erreicht, dass der Drehzahlregler immer einen Sollwert<br />
erhält, der größer als der Istwert ist. Der Drehzahlregler befindet sich deshalb ständig an<br />
seiner oberen Begrenzung. Über die Steuerung der Drehmomentbegrenzung wird schließlich<br />
erreicht, dass die Motorregelung das erforderliche Antriebsdrehmoment M soll erzeugt.<br />
v<br />
F<br />
v Linie<br />
n ist<br />
M W , n W<br />
i<br />
n<br />
M<br />
ASYM<br />
R<br />
2<br />
3<br />
F soll<br />
d<br />
1/d<br />
n Offset<br />
4<br />
5<br />
1<br />
M soll<br />
Motorregler<br />
1 Drehzahlregler<br />
2 Zugkraftverlauf<br />
3 Durchmesserberechnung<br />
4 Reibungskompensation<br />
5 Beschleunigungskompensation<br />
Grundprinzip der<br />
Zugkraftsteuerung<br />
beim Wickeln<br />
Der Begrenzungswert setzt sich zusammen aus dem Zugkraftsollwert F soll multipliziert <strong>mit</strong><br />
dem aktuellen Durchmesser d, dem Korrektursignal zur Kompensation der mechanischen<br />
Reibung und dem Korrektursignal zur Kompensation des Beschleunigungsmomentes.<br />
Die Basis für die Drehzahlvorsteuerung und auch für die Berechnung des Begrenzungswertes<br />
bildet eine genaue Durchmesserberechnung aus der aktuellen Drehzahl n ist und der<br />
Liniengeschwindigkeit v Linie . Die Vorsteuerung des Drehzahlreglers <strong>mit</strong> einem etwas zu<br />
großen Sollwert hat den Vorteil, dass nach einem Bahnriss der Antrieb nur bis zu dieser<br />
Drehzahl beschleunigt. Im Falle eines Abwicklers wird der Drehzahlregler nur <strong>mit</strong> dem<br />
Offsetwert n Offset angesteuert. Hier kann der Antrieb dann ungehindert bis zum Stillstand<br />
abbremsen.<br />
Im Allgemeinen ist die Materialstärke konstant, so dass der aktuelle Wickeldurchmesser d<br />
aus dem minimalen Durchmesser d min , der Anzahl der Wickellagen, die als Drehwinkel <br />
exakt bestimmt werden können, der aktuellen Liniengeschwindigkeit v Linie und der aktuellen<br />
Drehzahl n berechnet werden kann. Die Materialstärke kann bereits nach wenigen<br />
Wickellagen er<strong>mit</strong>telt werden. Zum Zeitpunkt t 0 sei der Wickler leer (d (t = 0) = d min ). Der<br />
Winkelzähler er<strong>mit</strong>telt den Drehwinkel bis zum Zeitpunkt t 1 .<br />
t<br />
1<br />
<br />
1 2 n(t) dt<br />
(<strong>5.</strong>19)<br />
t<br />
0<br />
G. Schenke, 1.2013 Mechatronik <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 77