

3 Betrieb im FAULHABER Modus - MicroMo
3 Betrieb im FAULHABER Modus - MicroMo
3 Betrieb im FAULHABER Modus - MicroMo

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
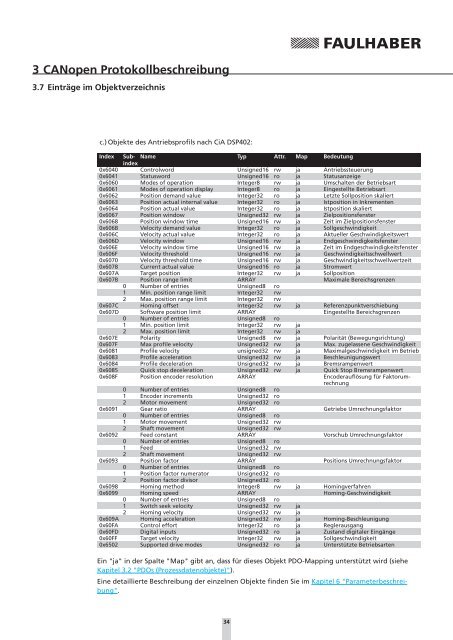
3 CANopen Protokollbeschreibung<br />
3.7 Einträge <strong>im</strong> Objektverzeichnis<br />
c.) Objekte des Antriebsprofils nach CiA DSP402:<br />
Index Subindex<br />
Name Typ Attr. Map Bedeutung<br />
0x6040 Controlword Unsigned16 rw ja Antriebssteuerung<br />
0x6041 Statusword Unsigned16 ro ja Statusanzeige<br />
0x6060 Modes of operation Integer8 rw ja Umschalten der <strong>Betrieb</strong>sart<br />
0x6061 Modes of operation display Integer8 ro ja Eingestellte <strong>Betrieb</strong>sart<br />
0x6062 Position demand value Integer32 ro ja Letzte Sollposition skaliert<br />
0x6063 Position actual internal value Integer32 ro ja Istposition in Inkrementen<br />
0x6064 Position actual value Integer32 ro ja Istposition skaliert<br />
0x6067 Position window Unsigned32 rw ja Zielpositionsfenster<br />
0x6068 Position window t<strong>im</strong>e Unsigned16 rw ja Zeit <strong>im</strong> Zielpositionsfenster<br />
0x606B Velocity demand value Integer32 ro ja Sollgeschwindigkeit<br />
0x606C Velocity actual value Integer32 ro ja Aktueller Geschwindigkeitswert<br />
0x606D Velocity window Unsigned16 rw ja Endgeschwindigkeitsfenster<br />
0x606E Velocity window t<strong>im</strong>e Unsigned16 rw ja Zeit <strong>im</strong> Endgeschwindigkeitsfenster<br />
0x606F Velocity threshold Unsigned16 rw ja Geschwindigkeitsschwellwert<br />
0x6070 Velocity threshold t<strong>im</strong>e Unsigned16 rw ja Geschwindigkeitsschwellwertzeit<br />
0x6078 Current actual value Unsigned16 ro ja Stromwert<br />
0x607A Target position Integer32 rw ja Sollposition<br />
0x607B Position range l<strong>im</strong>it ARRAY Max<strong>im</strong>ale Bereichsgrenzen<br />
0 Number of entries Unsigned8 ro<br />
1 Min. position range l<strong>im</strong>it Integer32 rw<br />
2 Max. position range l<strong>im</strong>it Integer32 rw<br />
0x607C Homing offset Integer32 rw ja Referenzpunktverschiebung<br />
0x607D Software position l<strong>im</strong>it ARRAY Eingestellte Bereichsgrenzen<br />
0 Number of entries Unsigned8 ro<br />
1 Min. position l<strong>im</strong>it Integer32 rw ja<br />
2 Max. position l<strong>im</strong>it Integer32 rw ja<br />
0x607E Polarity Unsigned8 rw ja Polarität (Bewegungsrichtung)<br />
0x607F Max profile velocity Unsigned32 rw ja Max. zugelassene Geschwindigkeit<br />
0x6081 Profile velocity unsigned32 rw ja Max<strong>im</strong>algeschwindigkeit <strong>im</strong> <strong>Betrieb</strong><br />
0x6083 Profile acceleration Unsigned32 rw ja Beschleunigungswert<br />
0x6084 Profile deceleration Unsigned32 rw ja Bremsrampenwert<br />
0x6085 Quick stop deceleration Unsigned32 rw ja Quick Stop Bremsrampenwert<br />
0x608F Position encoder resolution ARRAY Encoderauflösung für Faktorumrechnung<br />
0 Number of entries Unsigned8 ro<br />
1 Encoder increments Unsigned32 ro<br />
2 Motor movement Unsigned32 ro<br />
0x6091 Gear ratio ARRAY Getriebe Umrechnungsfaktor<br />
0 Number of entries Unsigned8 ro<br />
1 Motor movement Unsigned32 rw<br />
2 Shaft movement Unsigned32 rw<br />
0x6092 Feed constant ARRAY Vorschub Umrechnungsfaktor<br />
0 Number of entries Unsigned8 ro<br />
1 Feed Unsigned32 rw<br />
2 Shaft movement Unsigned32 rw<br />
0x6093 Position factor ARRAY Positions Umrechnungsfaktor<br />
0 Number of entries Unsigned8 ro<br />
1 Position factor numerator Unsigned32 ro<br />
2 Position factor divisor Unsigned32 ro<br />
0x6098 Homing method Integer8 rw ja Homingverfahren<br />
0x6099 Homing speed ARRAY Homing-Geschwindigkeit<br />
0 Number of entries Unsigned8 ro<br />
1 Switch seek velocity Unsigned32 rw ja<br />
2 Homing velocity Unsigned32 rw ja<br />
0x609A Homing acceleration Unsigned32 rw ja Homing-Beschleunigung<br />
0x60FA Control effort Integer32 ro ja Reglerausgang<br />
0x60FD Digital inputs Unsigned32 ro ja Zustand digitaler Eingänge<br />
0x60FF Target velocity Integer32 rw ja Sollgeschwindigkeit<br />
0x6502 Supported drive modes Unsigned32 ro ja Unterstützte <strong>Betrieb</strong>sarten<br />
Ein "ja" in der Spalte "Map" gibt an, dass für dieses Objekt PDO-Mapping unterstützt wird (siehe<br />
Kapitel 3.2 "PDOs (Prozessdatenobjekte)").<br />
Eine detaillierte Beschreibung der einzelnen Objekte finden Sie <strong>im</strong> Kapitel 6 "Parameterbeschreibung".<br />
34











