(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner
(LiIo)- und Lithium-Polymer (LiPo) - Graupner

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
den nachfolgend beschriebenen Einstellungen – die<br />
gestörten Signale ggf. automatisch durch im Empfänger<br />
zwischengespeicherten Steuersignale. Dadurch<br />
werden z. B. auch kurzzeitige Störungen, wie Feldstärkelöcher<br />
o. ä. ausgeblendet, welche sonst zu den<br />
bekannten „Wacklern“ führen würden. In diesem Fall<br />
leuchtet die rote LED am Empfänger.<br />
Solange Sie im aktuell aktiven Modellspeicher noch<br />
keine Fail-Safe-Programmierung vorgenommen haben,<br />
erscheint beim Einschalten des Senders in der<br />
Basisanzeige für einige Sek<strong>und</strong>en eine Warnanzeige:<br />
Fail-Safe<br />
einstellen!<br />
Programmierung<br />
Die Funktion „Fail Safe“ bestimmt das Verhalten des<br />
Empfängers im Falle einer Störung der Übertragung<br />
vom Sender zum Empfänger. Die Empfängerausgänge<br />
1 … 16 können wahlweise …<br />
1. die momentane Position beibehalten („halt“):<br />
Alle auf „halt“ programmierten Servos bleiben im<br />
Falle einer Übertragungsstörung so lange an den<br />
vom Empfänger zuletzt noch als korrekt erkannten<br />
Positionen stehen, bis ein neues, korrektes Steuersignal<br />
beim Empfänger eintrifft, oder<br />
2. sich beim Auftreten einer Übertragungsstörung<br />
nach Ablauf der „Verzögerungszeit“ in eine frei<br />
wählbare Position („Pos“) bewegen.<br />
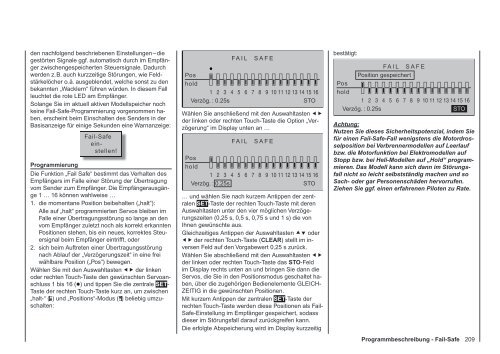
Wählen Sie mit den Auswahltasten �� der linken<br />
oder rechten Touch-Taste den gewünschten Servoanschluss<br />
1 bis 16 (�) <strong>und</strong> tippen Sie die zentrale SET-<br />
Taste der rechten Touch-Taste kurz an, um zwischen<br />
„halt-“ ( ) <strong>und</strong> „Positions“-Modus ( ) beliebig umzuschalten:<br />
FAIL SAFE<br />
Pos<br />
hold<br />
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16<br />
Verzög. : 0.25s STO<br />
Wählen Sie anschließend mit den Auswahltasten ��<br />
der linken oder rechten Touch-Taste die Option „Verzögerung“<br />
im Display unten an …<br />
FAIL SAFE<br />
Pos<br />
hold<br />
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16<br />
Verzög. : 0.25s STO<br />
… <strong>und</strong> wählen Sie nach kurzem Antippen der zentralen<br />
SET-Taste der rechten Touch-Taste mit deren<br />
Auswahltasten unter den vier möglichen Verzögerungszeiten<br />
(0,25 s, 0,5 s, 0,75 s <strong>und</strong> 1 s) die von<br />
Ihnen gewünschte aus.<br />
Gleichzeitiges Antippen der Auswahltasten �� oder<br />
�� der rechten Touch-Taste (CLEAR) stellt im inversen<br />
Feld auf den Vorgabewert 0,25 s zurück.<br />
Wählen Sie abschließend mit den Auswahltasten ��<br />
der linken oder rechten Touch-Taste das STO-Feld<br />
im Display rechts unten an <strong>und</strong> bringen Sie dann die<br />
Servos, die Sie in den Positionsmodus geschaltet haben,<br />
über die zugehörigen Bedienelemente GLEICH-<br />
ZEITIG in die gewünschten Positionen.<br />
Mit kurzem Antippen der zentralen SET-Taste der<br />
rechten Touch-Taste werden diese Positionen als Fail-<br />
Safe-Einstellung im Empfänger gespeichert, sodass<br />
dieser im Störungsfall darauf zurückgreifen kann.<br />
Die erfolgte Abspeicherung wird im Display kurzzeitig<br />
bestätigt:<br />
FAIL SAFE<br />
Position gespeichert<br />
Pos<br />
hold<br />
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16<br />
Verzög. : 0.25s STO<br />
Achtung:<br />
Nutzen Sie dieses Sicherheitspotenzial, indem Sie<br />
für einen Fail-Safe-Fall wenigstens die Motordrosselposition<br />
bei Verbrennermodellen auf Leerlauf<br />
bzw. die Motorfunktion bei Elektromodellen auf<br />
Stopp bzw. bei Heli-Modellen auf „Hold“ programmieren.<br />
Das Modell kann sich dann im Störungsfall<br />
nicht so leicht selbstständig machen <strong>und</strong> so<br />
Sach- oder gar Personenschäden hervorrufen.<br />
Ziehen Sie ggf. einen erfahrenen Piloten zu Rate.<br />
Programmbeschreibung - Fail-Safe<br />
209